爬壁机器人研究现状与技术应用分析*
2015-06-11闫久江赵西振李红军
闫久江,赵西振,左 干,李红军
(武汉纺织大学机械工程与自动化学院,湖北武汉 430073)
0 引言
机器人是传统的机构学与近代电子技术相结合的产物[1],爬壁机器人作为移动机器人领域一个重要组成部分,它是将移动机构(车轮、履带、腿等)与将它吸附在壁面上的吸附机构(磁铁、吸盘等,根据使用环境选择)组合起来实现的,它将地面移动技术拓展到垂直空间上,充实了机器人的应用范围。早在1966 年,日本的 A.NISHI[2]设计出了一台简单的爬壁机器人样机,它的原理是利用电风扇进气,产生低压空气,以产生的负压为吸附动力制作而成的,这被看做是爬壁机器人的研究开端。自此,爬壁机器人技术在世界范围内得到了迅速的发展。笔者结合典型的爬壁机器人最新成果总结分析爬壁机器人的研究现状,并探讨其应用前景。
1 爬壁机器人国外研究现状
西班牙的 R.Lal Tummala[3]等人设计了一种两种低功耗微型双足爬壁机器人,见图1,该机器人采用DSP控制的欠驱动系统,由三个电机驱动实现四个自由度的运动。韩国的Hwang Kim[4]等人研制了一台如图2的履带式吸盘机器人,他将真空吸盘安装在履带上,有别于传统的轮式真空吸附方式,能有效提高真空吸附的效率和吸附力。
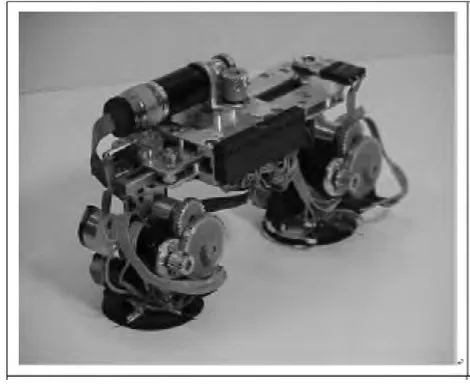
图1 足式爬壁机器人
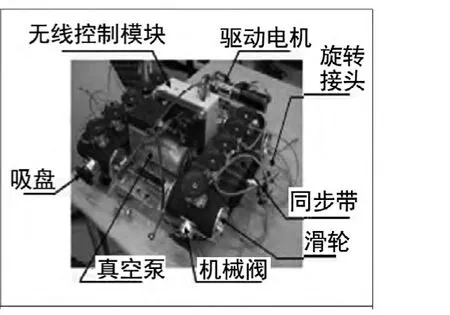
图2 履带式爬壁机器人
葡萄牙的 Mahmoud Tavakoli[5]等人研制了 1 个如图3所示的有全向轮永磁机器人,该机器人的车身3个展开臂的连接处安装了扭转弹簧,具有被动自适应不同曲率曲面的能力,同时由于其采用全向轮驱动,使其拥有较好的机动性。德国的Tache.F[6]等人研发了如图4的一种用于检测钢制复杂结构管道内部的磁轮机器人。该机器人有五个活动的自由度,每个主动轮上有用于升降稳定的侧杆臂和一个转向单元。侧杆臂上安装有磁轮,侧杆臂上磁轮高度略小于主动高度,主要是为了减小磁铁吸附作用和保持机器人平衡。
日本的Inoue.K[7]等人根据人体攀岩壁面附着原理成功研制了名叫The asterisk robot攀爬网状壁面的爬壁机器人,如图5所示,它有多个机械抓臂与蜘蛛六足相似,通过抓臂前端人手臂关节的摆动和足的伸缩来实现吊挂功能,通过六足的协调动作就可以悬挂在各种网状壁面上,同时能够实现多维度运动。
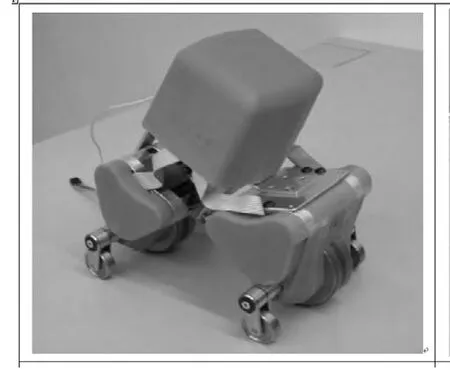
图3 双轮式爬壁机器人

图4 全向轮爬壁机器人
以色列的Avishai Sintov[8]等人开发了具有自主攀爬能力的机器人,能够攀上垂直和粗糙的表面,如图6所示。它采用四条腿,每条腿由一个四个自由度的连杆组成,在每条腿的前端上安装有类似鱼钩状的爪子,每个爪子可以在壁面上独立移动。这种设计的主要优点是不需要类似于壁虎尾巴的结构来平衡壁面受力。
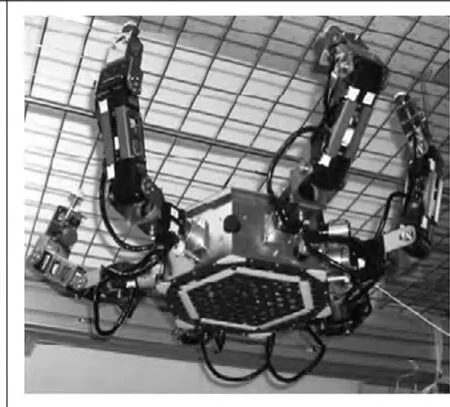
图5 机械力抓持爬壁机器人
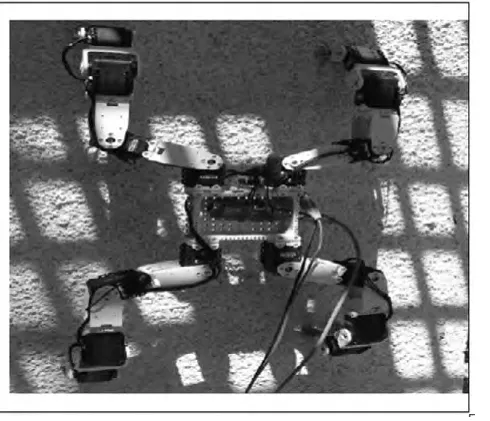
图6 仿生吸附式爬壁机器人
美国的Ozgur Unver[9]等人开发了基于弹性体粘合的履带式爬壁机器人,如图7所示。这种机器人能够以较快的速度实现连续、无剧烈震动的吸附在光滑或粗糙的壁面上运动。它属于是轻量级的(60~150 g)的爬壁类机器人,可以在光滑的表面攀爬0°到360°坡度。另外该爬壁机器人最多可携带300 g的负重,同时还可以越过高度为16 mm的障碍物。
美国一公司[10]设计了如图8所示的远程遥控爬壁机器人,它有四个或六个驱动轮,采用负压吸附原理吸附在壁面上,自带可充电锂聚合物电池组,可给驱动单元和控制单元供电长达45~60 min,同时其能吸附在大部分粗糙不平的壁面上。

图7 黏性吸附式爬壁机器人

图8 负压吸附式爬壁机器人
2 磁吸附爬壁机器人国内研究现状
国内对爬壁机器人的研究起步相对较晚,直到1996年,哈尔滨工业大学机器人研究所在国家“863”计划的资助下成功研制了多功能履带式罐壁喷涂检测磁吸附爬壁机器人[11],如图9所示。该机器人主要是针对石油行业中的储油、储水钢罐,定期喷砂除锈、喷漆防腐、涂层厚度检测等不利于人工操作的工作而研制的特种设备。作为国内开展爬壁机器人研究较早的单位,在其后的发展过程中又研制了如图10所示的应用于侦查领域基于负压吸附的爬壁机器人[12]。与此同时国内爬壁机器人研究也逐渐展开,比较有代表性的国内高校有清华大学、上海交通大学、大连海事大学及宁波大学等。
国内爬壁机器人技术研究比较成熟的就是磁吸附类爬壁机器人,大多偏重于应用型,主要用于油罐检测与船体壁面清洗、除锈、焊缝检测等,主要采用的形式多为履带式或者轮式。
应用永磁吸附的爬壁机器人结构的研究对象都有以下三个特点:
(1)它们都需要定期的检查、维修和保养。
(2)它们的表面都是柱状或者凹凸不平的壁面。
(3)都是属于钢制壁面,容易被磁铁吸附。
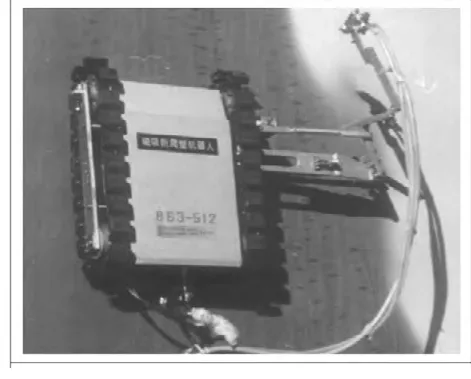
图9 磁吸附爬壁机器人

图10 侦查爬壁机器人
上海交通大学徐泽亮、马培荪[13]等介绍了如图11所示的基于稀土永磁均匀磁化且有别于传统普通吸盘结构的履带多体磁化爬壁机器人。闻靖[14]研制了基于储油罐清洗和检测工作的爬壁机器人,如图12,其在机械结构上未做重大改变,而是主要针对机器人变磁力吸附单元进行了研究,根据有限元仿真得到磁感应强度分布及磁吸附力,同时开发了基于Visual C++上、下位机控制的机器人控制系统。
大连海事大学的衣正尧[15]开发了一种履带式永磁真空混合吸附的爬壁机器人,如图13,主要用于船舶壁面除锈。该机器人特点是体型巨大,由于采用了永磁吸附,因此其带负载能力强,另外该机器人能够随着爬壁高度的变化自动调节机器人负载质量与重心位置。
宁波大学的陈伟[16]设计研制了船体抛光小型机器人弯翘曲面行走系统,如图14,利用RecurDyn软件对行走系统的曲面自适应效果进行动力学研究,模拟小型机器人在规则曲面和弯翘曲面上的运动情况,利用workbench建立对单个吸附单元进行静磁分析,分析了钢板厚度与空气间隙对吸附力的影响,从而填补了永磁吸附类爬壁机器人在吸附理论上的不足,并在实验中取得良好的运动效果。

图11 多体磁化式爬壁机器人

图12 变磁力式爬壁机器人
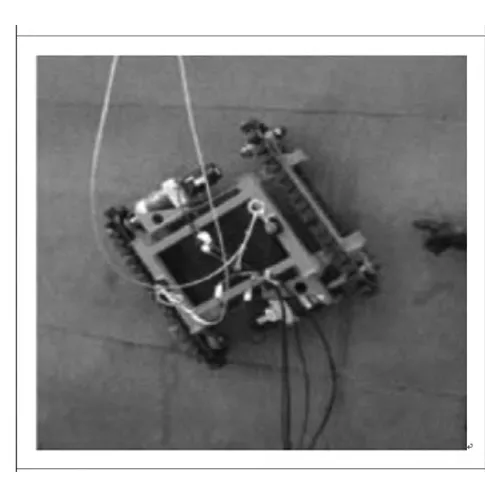
图13 永磁真空混合式爬壁机器人

图14 船体抛光小型机器人弯翘曲面行走系统
3 爬壁机器人技术现状与应用分析
3.1 爬壁机器人技术现状
目前爬壁机器人不同的研究方向主要归结于吸附方式与运动形式上两点。根据上述研究现状,大多数研究者是根据使用用途选用吸附方式,如在玻璃或光滑壁面上工作时,主要采用真空吸附或者仿生吸附,在钢制壁面上主要采用磁力吸附,主要包括永磁吸附和电磁吸附;而在复杂壁面上或者是弯曲壁面上大多采用混合吸附方式,目前爬壁机器人的吸附方式主要有以下几种。
若以运动形式来分,则可以分为轮式、履带式、足式以及框架式这几类,它们的应用途径主要取决于工作壁面的状况,并于吸附方式组装后选用,总体来说,其应用方式比较固定。
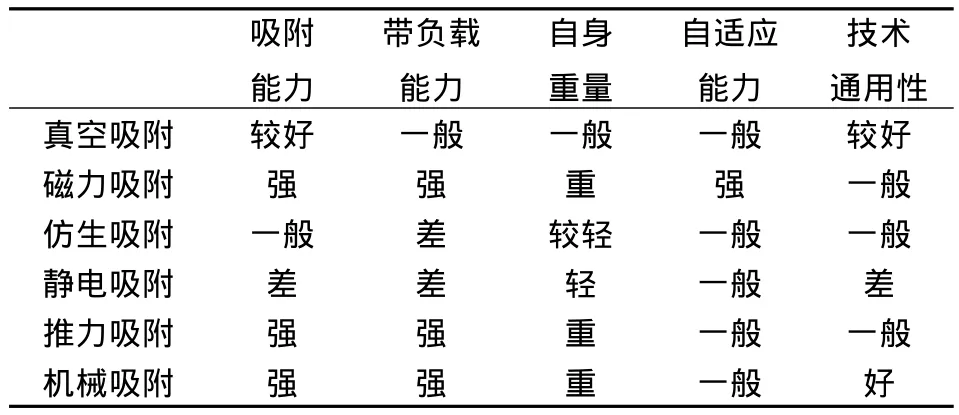
表1 不同吸附方式爬壁机器人性能对比
3.2 爬壁机器人应用分析
结合上述技术现状分析与对比可见,爬壁机器人经过几十年的研究发展,取得了一定的成绩,但是从产业化或者是从研究应用来讲,还有很大的差距,目前大多的研究成果都处在样机验证阶段,总体来看爬壁机器人技术还存在一些难以克服的问题:
(1)工业应用与样机验证的差距。目前爬壁机器人的研究基本上都是针对某一行业上的应用而展开的,因此其研究内容就必然带有局限性,无法突破有些特定的思维定式,从而也就制约了其走上产业化的道路,同时其行业应用的领域范围也受到了极大的限制。
(2)运动灵活性与吸附稳定性之间的矛盾。研究爬壁机器人的两大主题就是运动形式与吸附方式。而这两者是相互矛盾的,运动越灵活,其吸附力也应该越小越好,但是考虑到安全性,吸附力越大,安全性越好,这就形成了一个恶性循环。吸附力越大,运动性能越差;运动性能越好,吸附力会不足。因此需要在这个循环中找到折中点,这种折中的方式就会造成设计制造出的样机存在先天的缺陷。
(3)仿生研究与功能性的背道而驰。现在爬壁机器人的研究趋势多向仿生方向研究发展,如上提到的弹性吸附式、双足吸附式等都是基于模仿动物、人的动作而研制的,这种方式在控制上相对困难,功能性也相对较差,其最大的弊病是不能提供相应的工业应用方向,也就是说其研究成果仅限于实验验证,其研究价值也大打折扣。
[1] 刘淑霞,王 炎,徐殿国,等.爬壁机器人技术的应用[J].机器人,1999,21(2):148 -155.
[2] A.NISHI.Development of Wall- climbing Robots[J].Computers Elect.Engng,1996,22(2):123 -149.
[3] Tummala R L,Mukherjee R.Climbing the walls[J].IEEE Robotics and Automation,2002.9(4):10-19.
[4] Hwang Kim,Dongmok Kim,Hojoon Yang.Development of a Wall- climbing Robot using a Tracked Wheel Mechanism[J].Journal of Mechanical Science and Technology,2008(22):1490 -1498.
[5] Tache.F,ETH Zurich.Compact Magnetic Wheeled Robot With High Mobility for Inspecting Complex Shaped Pipe Structures[J].Intelligent Robots and Systems,IROS 2007.IEEE/RSJ International Conference on,2007:261 -266.
[6] Mahmoud Tavakoli,Carlos Viegas ,Lino Marques,J.Norberto Pires,Aníbal T.de Almeida.OmniClimbers:Omni- directional Magnetic wheeled Climbing Robots for Inspection of Ferromagnetic Structures[J].Robotics and Autonomous Systems,61(9):997 - 1007.
[7] Inoue K,Tsurutani T,Takubo.T Omni- directional Gait of Limb Mechanism Robot Hanging from Grid-like Structure[C].Robots and Systems,2006:1732 -1737.
[8] Avishai Sintov,Tomer Avramovich,Amir Shapiro.Design and Motion Planning of An Autonomous Climbing Robot with Claws[J].Robotics and Autonomous Systems,59(11):1008 -1019.
[9] Ozgur Unver,Metin Sitti.Tankbot:A Palm - size,Tank - like Climbing Robot using Soft Elastomer Adhesive Treads[J].The International Journal of Robotics Research,2010,29(14):1761 -1777.
[10] [DB/OL]http://www.clarifyingtech.com/public/robots/robots_public.html.
[11] 王 炎,刘淑良,潘沛霖,等.喷砂喷漆用履带式磁吸附爬壁机器人[J].机器人(增刊).1996(18):783-786
[12] Shanqiang Wu,Mantian Li,Shu Xiao.A Wireless Distributed Wall Climbing Robotic System for Reconnaissance Purpose[C].Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation,2006:1308 -1312.
[13] 徐泽亮,马培荪.爬壁机器人履带多体磁化结构吸盘的设计及优化[J].机械工程学报,2004,40(3):168 -172.
[14] 闻 靖.罐壁爬行机器人本体设计及其特性研究[D].上海:上海交通大学,2011.
[15] 衣正尧,弓永军,王祖温,等.新型船舶壁面除锈爬壁机器人动力学建模与分析[J].机械工程学报2010,46(15):23-30.
[16] 陈 伟.船体抛光小型机器人弯翘曲面行走系统[D].宁波:宁波大学,2014.