机械连接销磨损状态下汽车列车侧倾动态仿真
2015-06-10田晋跃姚金煜任振宁王金伟
田晋跃,姚金煜,任振宁,王金伟
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
机械连接销磨损状态下汽车列车侧倾动态仿真
田晋跃,姚金煜,任振宁,王金伟
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
建立了汽车列车侧倾过程的数学模型,研究了在汽车列车连接销磨损状态下发生侧倾时的一些重要特性;并利用MATLAB和VEH-SIM的联合计算机仿真,比较了不同车况下车辆的转向稳定性,重点讨论了在连接销磨损工况下汽车列车转向时的侧倾情况,探讨了实现汽车列车安全稳定性能的途径。
车辆工程;汽车列车;连接销磨损;侧倾;动态仿真
汽车列车的行驶安全十分重要。车辆一旦发生翻车,往往会造成重大的人身伤害和经济损失。汽车列车侧翻试验很难实施,分析和研究这类事的有效手段之一是,建立汽车列车侧倾状态下的数学模型,并进行计算机仿真。
汽车列车通常情况下出现翻车主要原因有:①坡道上行驶进行转向时,车辆失稳;②路面上有凹坑或者障碍物时,车辆的正常行驶状态受到干扰,车辆失稳;③在道路上高速行驶时,为避开障碍,所进行的紧急转向过大。但是,当汽车列车连接销出现磨损时,上述情况将会加剧,严重时会造成车辆侧翻。
为了提高汽车列车行驶稳定性,需要研究汽车列车转向时车辆侧翻的动态过程,建立汽车列车在转向过程中发生侧倾的数学模型,研究和分析在汽车列车连接销磨损的情况下,侧倾发生过程中的一些重要特性[1-2]。
1 连接销出现磨损时的力学特性
关于挂车和牵引车的选取可利用简单数学模型来确定[3]。设定:在发生制动前,挂车的质量为m2,初始速度为V0,牵引车的质量为m1。运动方向沿x轴正向,图1为汽车列车运动示意。发生制动后,挂车和牵引车一同以V′的速度前进,直到停车。此期间设S为滑行距离,设定车辆各轮胎相同,轮胎与地面的摩擦系数为μ=0.4,地面对轮胎表面的摩擦力为f,挂车、牵引车和连接装置碰撞过程中吸收的能量为Wp。讨论挂车与牵引车的质量关系。
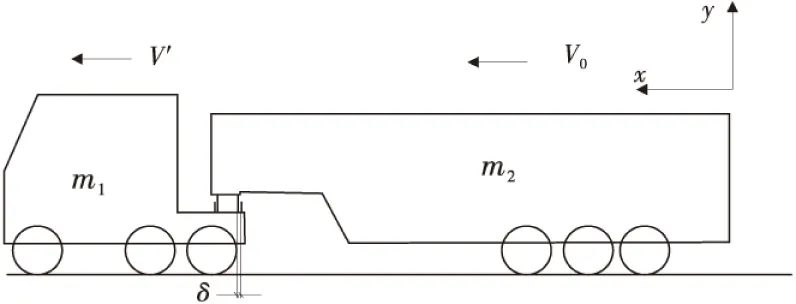
图1 车辆碰撞结构整体示意Fig.1 Schematic diagram of a vehicle collision
车辆的动能在碰撞后转化为三部分能量:一部分能量为挂车、牵引车和连接装置吸收的能量;一部能量为挂车和牵引车的动能;另外一部分为轮胎与地面摩擦力所做的功。建立如下数学方程:
(1)
联立得关于S的式子:
(2)
仿真过程中所用数据:挂车总质量为15 000 kg;牵引车质量设为3。滑行距离S≤(7~9)m。
2 连接销出现磨损后的动量定律
在汽车列车连接件出现磨损的情况下紧急制动,作用于连接销上的外力的冲量之和等于在力的作用方向上挂车动量变化率,即:
(3)
由于连接件的磨损,式(3)可以改写为:
(4)

3 汽车列车的转向侧倾分析
图2为所研究汽车列车侧倾时的受力示意[4-5]。假定空车质量14 t,满载质量30 t。
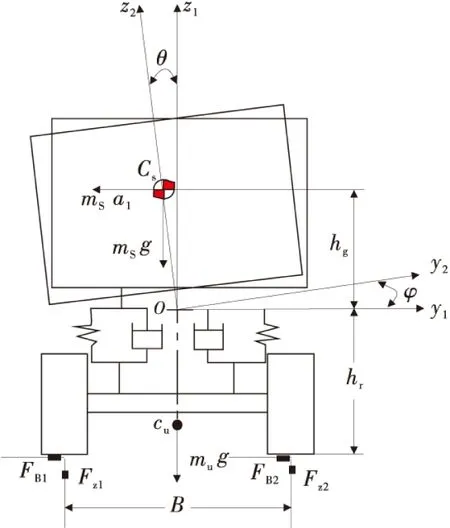
O—侧倾中心点;B—轮距;θ—铰接结构的摆动角度;φ—车身侧倾角,其大小与悬架侧倾角刚度有关;hg—车身质心到侧倾中心O点距离;hr—侧倾中心O点与路面之间的距离;Cs—悬挂部分质量重心;Cu—非悬挂部分质量重心;ms—车身悬挂质量;mu—车身非悬挂质量;FZ1,FZ2—两车轮所受到地面的反作用力;FB1,FB2—地面作用在车轮上的摩擦力
图2 侧倾受力示意
Fig.2 Schematic diagram of roll force
3.1 正常状态车辆失稳
汽车列车的悬挂部分的质量重心随车身侧倾会发生偏移,汽车列车前后悬架均为非独立悬架,所以不计非悬挂部分的质量所产生的离心力。由图2可以得到其向心加速度ay:
(5)
3.2 为避障而导致的车辆失稳
方向盘转角达最大极限,使得车辆的转弯半径最小,此时车辆受到的离心力为最大值。因为车辆的转向侧倾,使得汽车列车的两个悬挂质量重心发生了偏移,前后车桥所承受车身重量也随之发生改变。
转向过程中,转向内侧车轮所受到的地面反作用力为0时,汽车列车则达到了侧倾临界状态。
此时,v0为前车头的侧倾临界点速度,Rf为转向外侧前轮的转向半径,Rr为转向外侧后轮的转向半径。地面对车轮的摩擦力便为车辆转向所需的向心力,由公式
可得
(6)
同理后车身侧倾临界的速度v1为
(7)
4 汽车列车侧倾的过程仿真
汽车列车行驶时,为了避障碍物突然转向,时间很短,由于汽车列车本身结构特性,必定使得前车头与后车身间产生摆动,产生车身侧倾的情况,较为严重的情况即车辆产生侧翻[6-8]。
利用MATLAB软件对其数学模型仿真,观察铰接机构的参数θ对汽车列车侧翻临界点时轮胎转向半径,和对临界转向车速的影响。汽车列车仿真参数具体为:a,b为前后轴离前车头及后车身重心距离;mS1,mu1,mS2,mu2为前后部分悬架质量和非悬架质量;φ为车身的侧倾角;B为轮距;L为轴距;k为铰接点离前轴距离。
利用Veh-sim软件对相同车辆参数系统进行动态仿真。
4.1 汽车列车仿真参数
图3为仿真对象车辆的具体参数。


图3 汽车列车相关参数(单位:m)
4.2 连接销没有磨损时车辆换道工况
连接件无磨损,车辆初始速度为96.56 km/h情况下的换道工况仿真见图4。
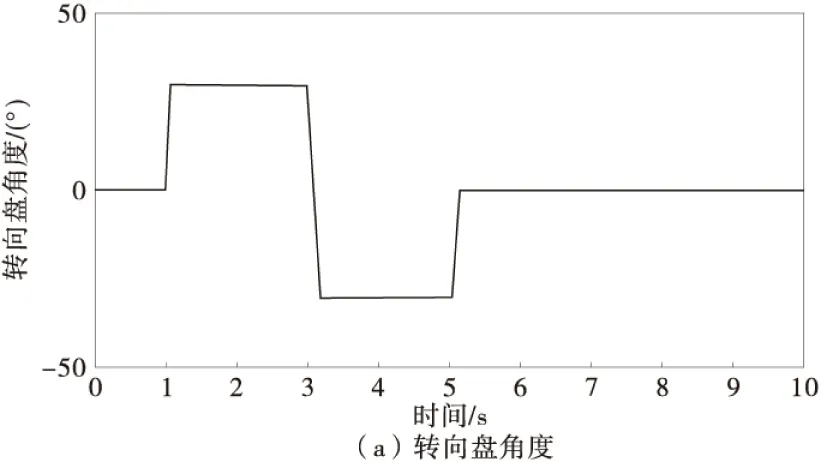

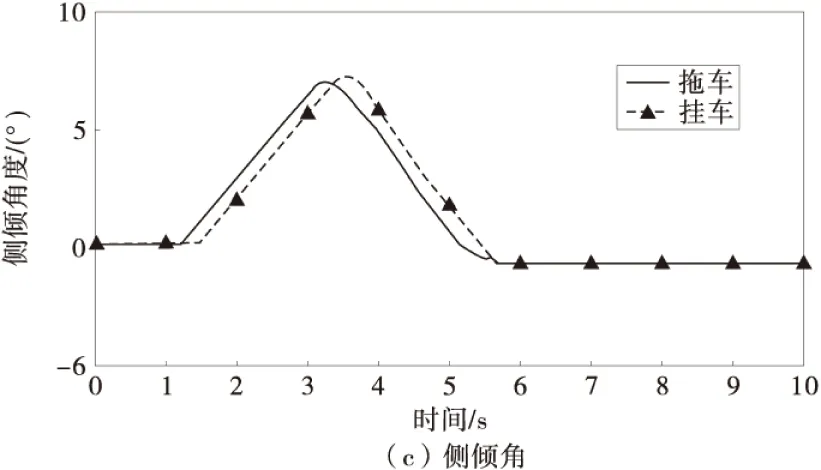
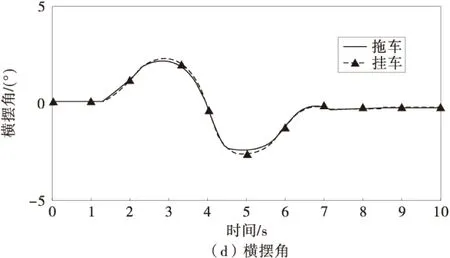
图4 在初始车速96.56 km/h时汽车列车超车换道仿真Fig.4 Simulation diagram of combination vehicle’s overtaking and changing anes in the case of the initial speed at 96.56 km/h
由图4可见:汽车列车的牵引车和挂车方向盘的跟随转角变化,横摆角、侧倾角度和侧向加速度变化较为正常,无异常情况。
4.3 当连接销出现磨损车辆换道时的工况
当连接件销有2 mm的磨损,车辆初始速度为48.28 km/h情况下的换道工况仿真见图5。

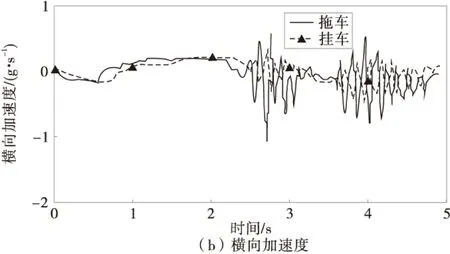
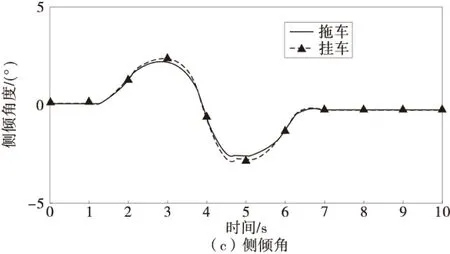
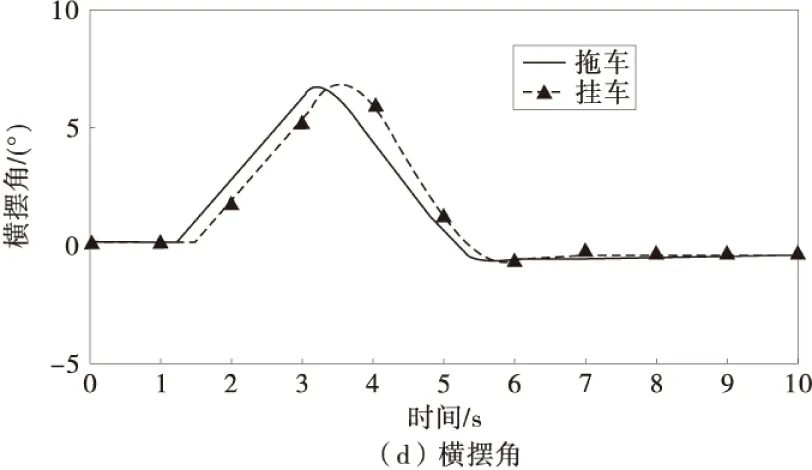
图5 在初始车速48.28 km/h时汽车列车换道仿真Fig.5 Simulation diagram of combination vehicle’s changing lanes in the case of the initial speed at 48.28 km/h
从图5中可发现:初始车速为48.28 km/h时,汽车列车进行超车换道,牵引车及挂车跟随方向盘的转角变化,侧向加速度会出现不正常波动,横摆角和侧倾角度变化较为平稳。
4.4 连接销磨损时,车辆的转向和制动工况
当连接销有2 mm的磨损时,车辆初始速度为48.28 km/h的情况下换道且制动。仿真情况见图6。
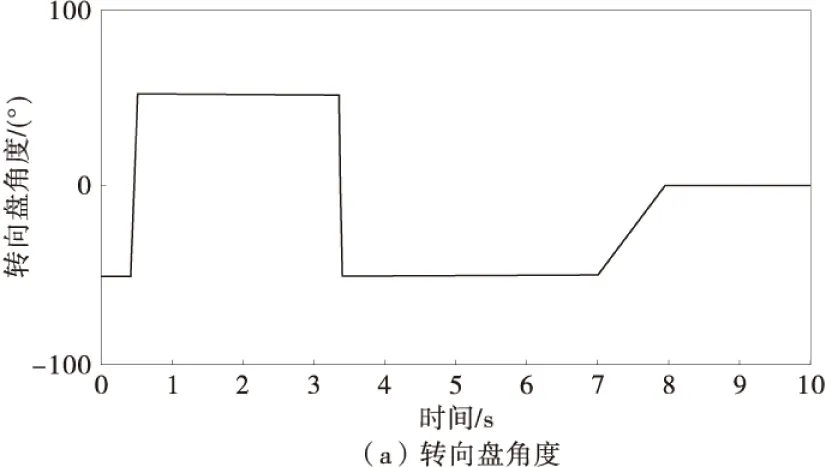
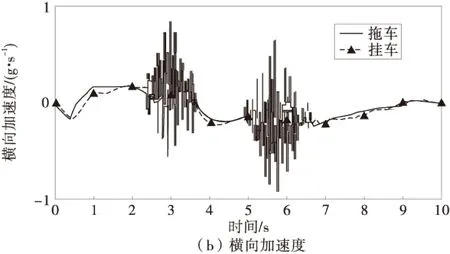
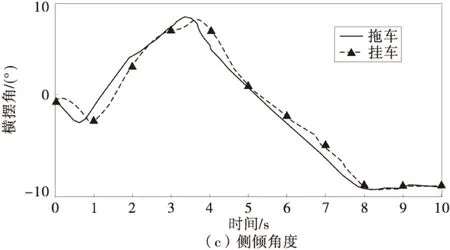
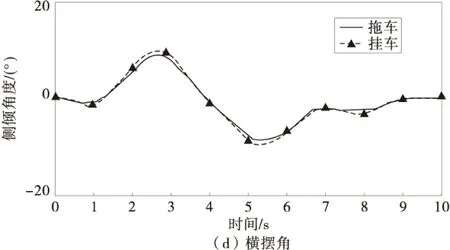
图6 在初始车速80.47 km/h时汽车列车转向和制动仿真Fig.6 Simulation diagram of combination vehicle’s steering and braking in the case of the initial speed at 80.47 km/h
从图6中可发现:在初始车速为48.28 km/h,汽车列车进行换道并制动,牵引车及挂车跟随方向盘的转角变化,汽车列车稳定性变坏,且可能出现侧翻。
4.5 连接销磨损时车辆紧急转向和制动工况
当初始车速为80.47 km/h时,方向盘转动50°并实施制的仿真如图7。
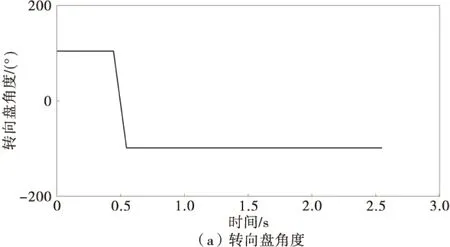
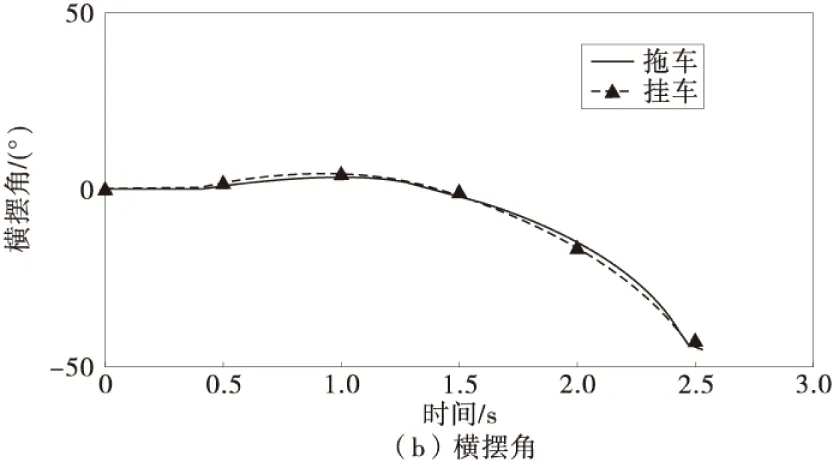
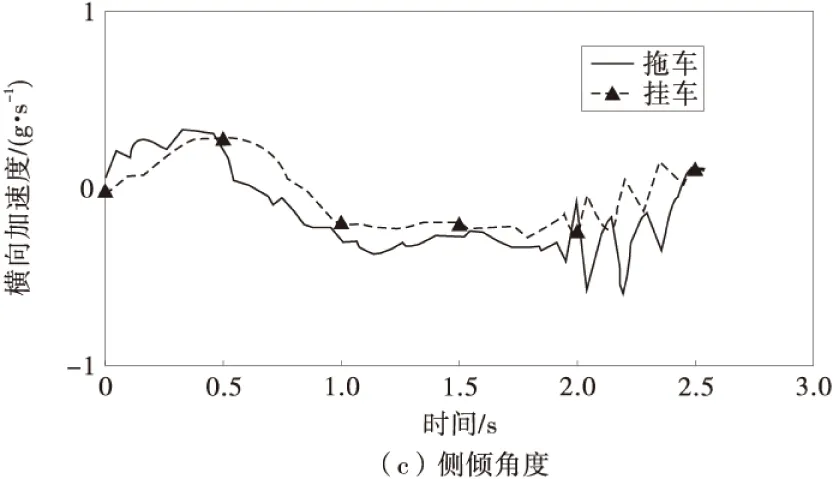

图7 初始车速80.47 km/h时方向盘转动50°并实施制动的仿真Fig.7 Simulation diagram of combination vehicle’s braking and turning its steering wheel to 50° in the case of the initial speed at 80.47 km/h
如图7,当连接件销有2mm的磨损,初始车速为80.47 km/h,方向盘转角为50°,进行制动时,车辆于2.5 s处发生侧翻。
图8为侧翻过程仿真。

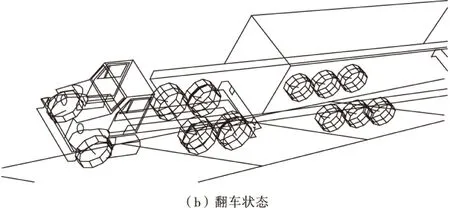
图8 车辆侧倾仿真形态及翻车状态Fig.8 Simulation form of vehicle oblique and rolling
经过对汽车列车为避开路面障碍,进行紧急转向且动作过大的情况的仿真分析,可以发现,减少连接销的磨损,增加汽车列车轮距,降低车辆重心高度,增大轮胎与路面摩擦系数可以提高车辆防侧倾的能力。
5 结 论
1)建立了汽车列车转向过程中侧倾数学模型,并利用MATLAB对模型进行仿真分析,仿真结果证明了在汽车列车机械连接销出现一定程度磨损后,车辆转向和制动的稳定性下降,增加了车辆侧翻的可能性。其结果可为进一步研究汽车列车的转向侧翻保护及车辆悬架的主动安全控制奠定基础。
2)从汽车列车侧倾工况下的动态特性仿真看出,在连接件销轴无磨损时,车辆行驶速度为96.56 km/h时,转向换道,发生侧翻的概率较小。
3)在连接件销轴出现2 mm磨损时,初始车速为80.47 km/h,汽车列车的方向盘突然转动50°,并实施制动,2.5 s时出现最大横向和纵向加速度,此时离心力和制动力达到最大值,很有可能会出现侧翻的现象。
[1] Sayers M W,Riley S M.Modeling assumptions for realistic multi-body simulations of the yaw and roll behavior of heavy trucks [J].SAE Transactions,1996,105:72-83.
[2] Blow P W,Woodrooffe J H,Sweatman P F.Vehicle stability and control research for US comprehensive truck size and weight (TS&W) study [J].SAE Transactions,1998,107:617-623.
[3] 贾会星,程振东,田晋跃.铰接车辆转向侧翻过程仿真[J].筑路机械与试工机械化,2005(11):56-58. Jia Huixing,Cheng Zhendong,Tian Jinyue.Simulation of the rollover on articulated vehicles steering [J].Road Machinery & Construction Mechanization,2005(11):56-58
[4] 许志生.汽车理论 [M].2版.北京:机械工业出版社,1990:162-176. Xu Zhisheng.Automotive Principle [M].2nd ed .Beijing:China Machine Press,1990:162-176.
[5] 吴学雷,姜吉庆,陈炎.半挂汽车列车侧倾稳定性计算机模拟研究[J].车辆与动力技术,1996(3):1-13. Wu Xuelei,Jiang Jiqing,Chen Yan.A study of computer simulation of tractor-semi-trailer roll stability [J].Vehicle & Power Technology,1996(3):1-13.
[6] 李红志,李亮,杨财.等.车辆转向过程稳定性分析与控制[J].清华大学学报:自然科学版,2010,50(8):1282-1286. Li Hongzhi,Li Liang,Yang Cai,et al.Analysis and control of vehicle stability of passenger cars during steering [J].Journal of Tsinghua University:Science & Technology,2010,50(8):1282-1286.
[7] 周国建.铰接式装载机转向及横向稳定动态数学模型[J].建筑机械,1993(2):16-20. Zhou Guojian.Dynamic mathematical model of articulated loaders steering and ttransverse stable [J].Construction Machinery,1993(2):16-20.
[8] Jamie G,Oliver E.Simulation of dynamic rollover threshold for heavy trucks [J].Society of Automotive Engineers,2003,112:192-200.
Dynamic Simulation of Combination Vehicle Rollover in the Case of Worn Mechanical Coupling Pin
Tian Jinyue, Yao Jinyu, Ren Zhenning, Wang Jinwei
(School of Automobile & Traffic Engineering, Jiangsu University, Zhenjiang 212013, Jiangsu, China)
A mathematical model of the process of the rollover of combination vehicle was established, and some important characteristics in the process of rollover in the case that the connecting pin of combination vehicle had been worn were analyzed and researched. Vehicle steering stability under different conditions was analyzed and compared by the computer simulation of MATLAB and VEH-SIM, focusing on the conditions that the connecting pin was worn in combination vehicle steering roll situation. Finally, the way of realizing the safe and stable performance of combination vehicles was explored.
vehicle engineering; combination of vehicles; wear and tear of connecting pin; rollover; dynamic simulation
10.3969/j.issn.1674-0696.2015.05.30
2013-09-17;
2013-10-25
田晋跃 (1958—),男,山西孝义人,研究员,主要从事车辆液压传动及控制技术方面的研究。E-mail:tianjingyue@lys.edu.com 。
姚金煜 (1988—),男,江苏启东人,硕士研究生,主要从事车辆设计与研发方面的研究。E-mail:372395640@qq.com 。
U 462.1
A
1674-0696(2015)05-150-05
