半挂汽车列车结构参数及模型处理方式对平顺性的影响
2015-06-10刘献栋吕海波张红卫单颖春
刘献栋,吕海波,张红卫 ,单颖春
(1.北京航空航天大学 交通科学与工程学院,北京 100191;2.交通运输部公路科学研究院,北京 100088)
半挂汽车列车结构参数及模型处理方式对平顺性的影响
刘献栋1,吕海波1,张红卫2,单颖春1
(1.北京航空航天大学 交通科学与工程学院,北京 100191;2.交通运输部公路科学研究院,北京 100088)
建立了6×4牵引车与3轴半挂车组成的半挂汽车列车11自由度半车动力学模型,在道路不平度的激励下通过频域方法研究了牵引车的驱动桥平衡梁及全浮式驾驶室的不同处理方法对半挂汽车列车平顺性仿真结果的影响。之后,进一步研究了悬架刚度、悬架阻尼系数、轮胎刚度、牵引销前置距及挂车上货物质心位置变化对半挂汽车列车平顺性的影响,并按照其影响的大小进行了排序。这些工作为半挂汽车列车的设计及牵引车与半挂车的匹配提供了一定指导。
车辆工程;半挂汽车列车;平顺性;匹配;结构参数
0 引 言
半挂汽车列车主要用于中长途货物的运输,而甩挂运输是一种先进的运输组织方式,能够有效地降低物流成本、推动现代物流和综合运输发展。半挂汽车列车是甩挂运输的主要车辆。在甩挂运输中,与牵引车组成汽车列车的半挂车型号以及货物装载情况取决于站场的运输组织和具体需要,因此半挂车以及货物装载情况是多变的。不同的半挂车参数以及货物装载情况将对半挂汽车列车的平顺性产生影响,并因此影响到甩挂运输的货物安全和运输效率,因此牵引车与半挂车的平顺性匹配显得尤为重要。显然,对半挂汽车列车结构参数及模型处理方式的研究有助于对半挂汽车列车平顺性的认识与理解[1],并对半挂汽车列车的参数设计及牵引车与半挂车的匹配具有指导作用。
近年来,多位学者在半挂汽车列车的平顺性方面做了很多有意义的工作。国外众多学者研究了铰接式车辆的动态响应特性,并提出了牵引车-半挂车的优化模型,驾驶室和牵引车悬架系统均处理为简单的单自由度振动系统[2-3]。为简化分析,罗明廉[4]对三轴汽车平顺性的研究采用1/4车模型;蒯行成等[5]提出了采用平衡悬挂系统的1/2车模型,将全浮式驾驶室及平衡悬架简化成2自由度的振动系统;李相彬等[6]进一步完善了采用全浮式驾驶室和平衡悬挂系统的半车模型,并在平衡悬架处加入了弹簧与阻尼。目前,在半挂汽车列车的平顺性研究中,对全浮式驾驶室和平衡悬挂系统的处理采用了不同方式,但是不同处理方式对平顺性仿真计算及评价结果有何影响尚未见文献报道。
笔者建立了带有全浮式驾驶室和平衡悬架的6×4牵引车+3轴半挂车的半挂汽车列车动力学模型。研究了平衡梁及全浮式驾驶室的不同处理方法对汽车列车平顺性的影响,并进一步研究了悬架刚度及阻尼参数、轮胎刚度、牵引销前置距及挂车上货物质心位置变化对半挂汽车列车平顺性的影响,之后按照影响的大小进行了排序。这些工作的完成有助于改善半挂汽车列车运行的平顺性和在甩挂运输中对牵引车与半挂车进行匹配。
1 半挂汽车列车平顺性模型
带全浮式驾驶室和平衡悬架的6×4牵引车+3轴半挂车的动力学模型[6],如图1。
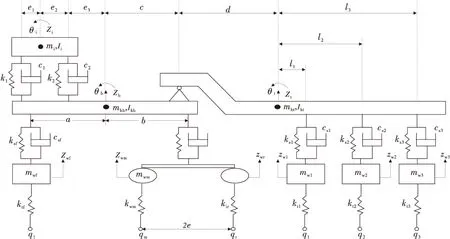
mi,mhb,mht—驾驶室、牵引车车身、半挂车车身质量;Ii,Ihb,Iht—驾驶室,牵引车车身、半挂车车身面内转动惯量;mwf,mwm,mwr—牵引车前轴、中轴、后轴非簧载质量;mw1,mw2,mw3—半挂车1轴、2轴、3轴非簧载质量;a,b—牵引车车身质心至前后、中后轴中心的纵向距离;c,d—牵引车质心、半挂车质心至鞍座的纵向距离;2e—牵引车中后轴纵向距离;e1,e2—驾驶室质心至驾驶室前、后悬置纵向距离;;e3—牵引车质心至驾驶室后悬置纵向距离;l1,l2,l3—半挂车车身质心至1轴、2轴、3轴中心的纵向距离;k1,k2—驾驶室悬置的前后弹簧刚度;C1,C2—驾驶室悬置的前、后减震器阻尼;ksf—牵引车前轴悬架垂直刚度;ksr—牵引车中后轴平衡悬架垂直刚度;Csf—牵引车前轴悬架垂直阻尼;Csr—牵引车中后轴平衡悬架垂直阻尼;ktf,ktm,ktr—牵引车前轴、中轴、后轴的轮胎刚度;ks1,ks2,ks3—半挂车1轴、2轴、3轴悬架垂直刚度;Cs1,Cs2,Cs3—半挂车1轴、2轴、3轴悬架垂直阻尼;kt1,kt2,kt3—分别为半挂车1轴、2轴、3轴的轮胎刚度;qf,qm,qr,q1,q2,q3—牵引车及半挂车各轴路面对轮胎激励;Zwf,Zwm,Zwr—牵引车前轴、中轴、后轴非簧载质量的垂向位移,图示方向为正;Zw1,Zw2,Zw3—半挂车1轴、2轴、3轴非簧载质量的垂向位移,图示方向为正;Zj,Zb,Zt—驾驶室质心、牵引车车身质心、半挂车车身处的垂向位移,图示方向为正;θj,θb,θt—驾驶室、牵引车车身、半挂车车身面内转动角度。图示方向为正
图1 6×4牵引车+3轴半挂车11自由度振动模型
Fig.1 The 11DOF vibration model of the tractor semitrailer combination
在动力学方程建立过程中,进行的假设为:汽车沿纵向中心线左右对称,并作匀速直线运动;车身在平衡位置附近作微幅振动,车身质心在轴向面内的振动忽略不计,车体绕Z轴的角振动忽略不计;平衡悬架的钢板弹簧可视为弹性弹簧与刚性平衡杆2个分开的元件,忽略平衡杆的转动惯量,平衡杆的质量等分给牵引车中、后车轴;刚性平衡杆和中、后车轴以铰接的形式连接;牵引车与半挂车之间以铰接的形式连接;忽略除路面以外的其他振源。
需要注意的是,由于受鞍座的约束,半挂车的垂直运动和俯仰运动只有1 个有效自由度。半挂车的垂直运动位移Zt、俯仰运动角θt和牵引车的垂直运动位移Zb、俯仰运动角θb有如下数学关系:
Zt=Zb+cθb+dθt
(1)
采用拉格朗日法可得到半挂车列车平顺性的动力学方程为:

(2)
在动力学方程推导过程使用的结构参数如图1和表1。
式(2)中,位移向量为:
X=[ZWf,ZWm,ZWr,ZW1,ZW2,ZW3,Zj,Zb,θj,θb,θt]T
质量矩阵为:
其中:Mt=diag(mwf,mwm,mwr,mw1,mw2,mw3,mi)
阻尼矩阵为:

C12=
C21=C12T
C88=Csf+Csr+Cs1+Cs2+Cs3+C1+C2
C810=C108=-aCsf+bCsr+C(Cs1+Cs2+Cs3)-
(e1+e2+e3)C1-e3C2
C811=C118=d(Cs1+Cs2+Cs3)+l1Cs1+l2Cs2+l3Cs3
C99=e1C1e1+e2C2e2
C910=C109=-e1(e1+e2+e3)C1+e2C3e2
C911=C119=0
C1010=a2Csf+b2Csr+C2(Cs1+Cs2+Cs3)+(e1+e2+e3)2C1+e3C2e3
C1011=C1110=Cd(Cs1+Cs2+Cs3)+C(l1Cs1+l2Cs2+l3Cs3)
刚度矩阵K的形式和阻尼矩阵C的形式基本相同,只有K11部分稍有不同。
村里也有水井,一条巷子走到岔道就有一口,井水是专用来吃的。有了自来水后,井口就封上了。井口太浅,怕孩子追逐玩耍时落进去。
广义激励力矩阵为:
F=KTq
式中:KT为轮胎的广义刚度矩阵;q为路面垂直位移输入。
2 半挂汽车列车平顺性分析
采用频域分析对模型进行求解,系统激励与响应功率谱密度之间的关系为:
Gu(f)=H*(ω)Gf(f)HT(ω)
(3)
式中:Gu(f),Gf(f)分别为振动响应和路面输入的功率谱密度;H*(ω),HT(ω)分别为系统频率响应函数矩阵的共轭和转置,并且ω=2πf。
对式(2)进行傅立叶变换,可得系统的频率响应函数:
Z(ω)=(-ω2M+jωc+K)-1F=H(ω)q
(4)
根据GB 7031《车辆振动输入——路面不平度表示》中的建议,空间频率路面谱密度的拟合表达式为:
(5)
换算为时间频率功率谱密度:
(6)式(5)、式(6)中:Gq(n0)为路面不平度系数,m3;n为空间频率,m-1;n0为参考空间频率,取n0=0.1 m-1;W为频率指数,取W=2;u为车速,m/s;f为频率,Hz。
假设牵引车的前轴、中轴、后轴和半挂车的1轴、2轴、3轴的车轮沿同一路面轨迹直线行驶,路面输入的功率谱密度必然包括车轮的路面自谱以及相互车轮之间的路面互谱,所以路面输入的功率谱密度矩阵为:
(7)
式(7)中:L1=a+b-e;L2=a+b+e;L3=a+b+c+d+l1;L4=a+b+c+d+l2;L5=a+b+c+d+l3。
根据GB/T 4970—2009《汽车平顺性试验方法》对半挂汽车列车的平顺性进行评价,需计算路面激励传递至人体和货箱参考点的加速度振动响应。
由上述公式可求得位移响应的功率谱密度,根据式(8)可得加速度响应的功率谱密度:
(8)
加速度均方根值是汽车平顺性的最终评价指标,本文根据GB/T 4970—2009进行随机输入行驶评价指标的计算。

(9)

加权加速度均方根值按照式(10)计算:
(10)
式中:wi为第j个1/3倍频带的加权系数。
3 计算实例及结论
以某半挂汽车列车为例,选取B级路面、车速70 km/h进行随机响应仿真分析,其相关参数如表1。

表1 模型参数
在已发表的文献中,为了问题的简便多采用简化的全浮式驾驶室模型,牵引车两个后桥也多简化为单自由度振动系统,如图2。该模型与实际情况有一定的差别,但不同建模方式对半挂汽车列车平顺性仿真结果的影响,未见报道。
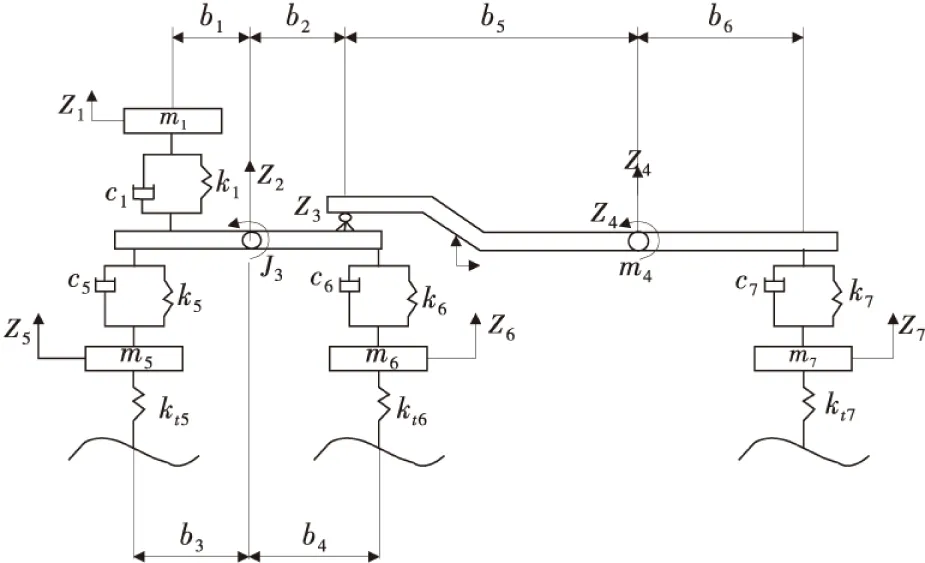
图2 7自由度半车振动模型Fig.2 7-DOF model of tractor semitrailer combination
3.1 全浮式驾驶室模型的不同处理方式对半挂汽车列车平顺性的影响
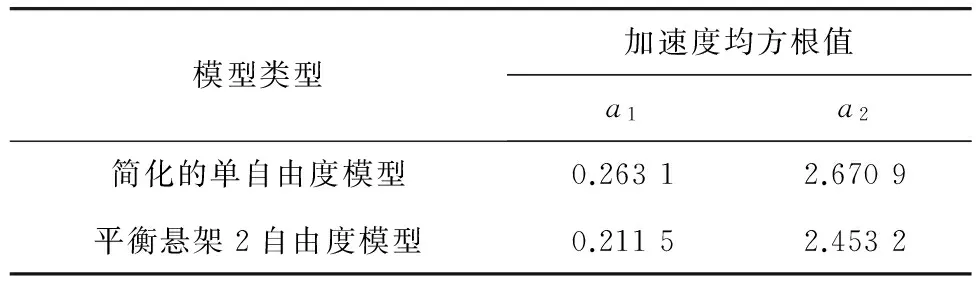
近年来半挂汽车列车多采用全浮式驾驶室。笔者对考虑全浮式驾驶室2自由度模型、简化单自由度模型(两模型的质量、刚度及阻尼的总量不变)的汽车列车平顺性进行仿真。结果如图3及表2,其中主要评价指标为座椅加权加速度均方根值a1和货箱参考点加速度均方根值a2。仿真中使用的全浮式驾驶室2自由度模型和简化的单自由度模型分别如图1,图2,除驾驶室外,其他参数和结构相同,见图1。
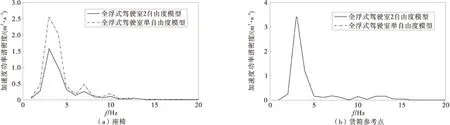
图3 座椅及货箱参考点处加速度功率谱密度Fig.3 Power spectrum density of reference point acceleration at seat acceleration container

由图3和表2的计算结果可得出:当采用全浮式驾驶室2自由度模型时,所得座椅处加权加速度均方根值与使用简化的单自由度模型相比有明显减小(针对文中的结构数据而言,减小22.7%),而货箱参考点处加速度均方根值变化很小。这些说明,若采用简化的单自由度模型处理全浮式驾驶室,仿真所得平顺性数据偏大,对平顺性的评价偏保守,实际中若需较高的仿真精度,应使用考虑具有全浮特性的模型(2自由度或多自由度模型)。
3.2 牵引车平衡悬架不同建模方式对半挂汽车列车平顺性的影响
6×4牵引车后轴通常采用平衡悬架,而其模型常将其简化为一个轴(图2)。笔者对考虑平衡悬架2自由度模型、简化单自由度模型(两模型的非簧载质量及刚度总量不变)的汽车列车平顺性进行仿真。仿真中使用的平衡悬架两自由度模型分别如图1、图2,除平衡悬架外,其他参数和结构相同,见图1。

图4 货箱参考点处加速度功率谱密度Fig.4 Power spectrum density of reference point acceleration at seat acceleration container
由图4及表3的计算结果可得出:当采用平衡悬架2自由度模型时,所得座椅处加权加速度均方根值及货箱参考点处加速度的均方根值与使用简化模型相比均有明显减小(针对文中的结构数据而言,分别减小19.0%,8.2%)。这些说明,若采用简化的单自由度模型处理平衡悬架,仿真所得平顺性数据偏大,对平顺性的评价偏保守,实际中若需较高的仿真精度,应使用考虑具有平衡作用的平衡悬架模型(2自由度或多自由度模型)。
3.3 结构参数对半挂汽车列车平顺性的影响
在系统原参数基础上分别调整±10%,±20%,计算采用图1模型,得到悬架刚度及阻尼参数、轮胎刚度、牵引销前置距及挂车上货物质心位置(即牵引销至半挂车质心纵向距离d)变化对半挂汽车列车平顺性的影响,计算结果如图5~图7。
牵引销前置距增大时,汽车列车座椅处平顺性变差,而货箱参考点处平顺性有所改善;货物质心前移(d减小),驾驶室加权加速度均方根值有所降低,平顺性有所改善,但对货箱参考点处影响较小。
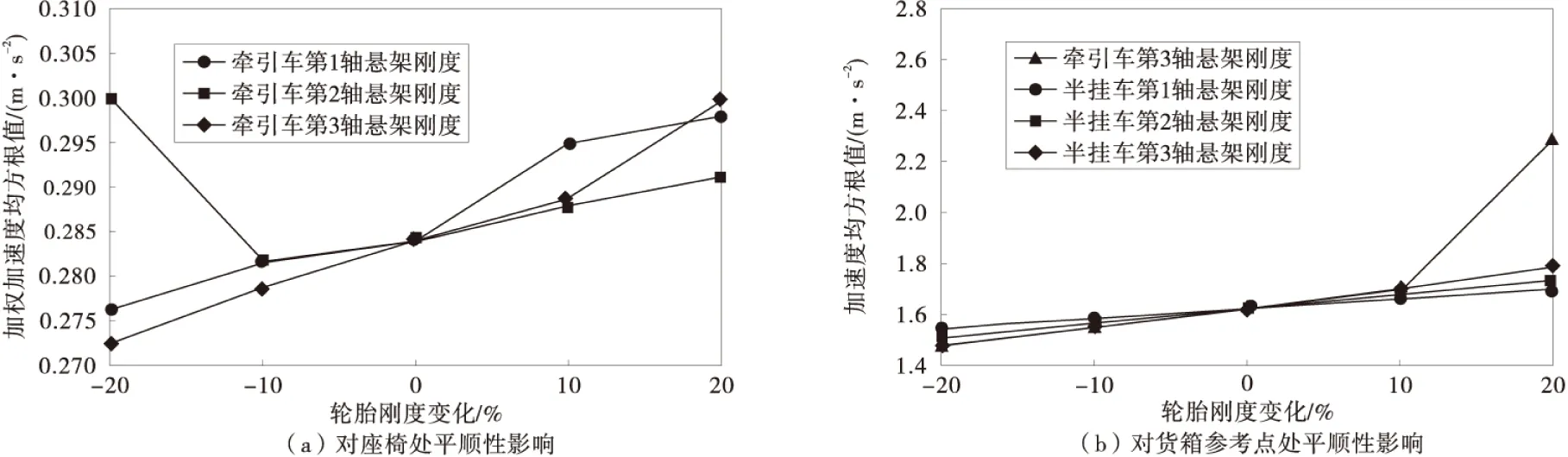
图7 轮胎刚度变化对平顺性影响Fig.7 Effect of tire stiffness on the ride performance
悬架刚度、阻尼及轮胎刚度变化对半挂汽车列车平顺性的影响数据较多,在此只给出影响明显的部分。牵引车悬架刚度增加,座椅处平顺性变差,货箱参考点受影响较小;半挂车悬架刚度增加,货箱参考点平顺性变差,座椅处受影响较小;在目前的阻尼数据情况下,悬架阻尼增大,座椅和货箱参考点处振动均有小幅度改善;挂车轮胎刚度变化对半挂汽车列车影响明显,其刚度减小,车辆平顺性得到改善。
4 结 论
笔者以装有平衡悬架并采用全浮式驾驶室的半挂汽车列车为研究对象,研究了平衡梁及全浮式驾驶室的不同处理方法对汽车列车平顺性的影响,并进一步研究了悬架刚度及阻尼参数、轮胎刚度、牵引销前置距及挂车上货物质心位置变化对半挂汽车列车平顺性的影响,得出以下结论:
1)各主要参数对其平顺性影响,由大到小排列如下:牵引销前置距>挂车上货物质心变化>悬架刚度>悬架阻尼系数>轮胎刚度。
2)若对全浮式驾驶室进行单自由度简化,其平顺性仿真结果将偏大,若需较高的仿真精度,应使用考虑具有全浮特性的模型。
3)若对牵引车平衡悬架进行单自由度简化,其平顺性仿真结果也将偏大,当需要较高的仿真精度时,应使用具有平衡作用的悬架模型。
[1] 杜子学,董英娟.整车平顺性仿真及实验优化[J].重庆交通大学学报:自然科学版,2008,27(增刊1):994-996. Du Zixue,Dong Yingjuan.Simulation and optimization of vehicle ride comfor[J].Journal of Chongqing Jiaotong University:Natural Science,2008,27(Sup1):994-996.
[2] Elmadany M M,Dokainish M A.An assessment of Ride Quality of Heavy-Duty Truck[R/OL].(1980-11-01)[2012-07-14].http://papers.sae.org/801418.
[3] Elmadany M M,Dokainish M A.Optimization Design of Tractor Semitrailer Suspension System[R/OL].(1980-11-01)[2012-07-14].http://papers.sae.org/801419.
[4] 罗明廉.关于装有平衡悬挂的三轴汽车的振动问题[J].汽车技术,1981(1):2-13. Luo Minglian.The vibration of three axle vehicle with balanced suspension[J].Automobile Technology,1981(1):2-13.
[5] 蒯行成,李永红,任恒山.采用平衡悬挂系统的载重汽车的随机响应分析[J].湖南大学学报:自然科学版,2005,32(2):25-28. Kuai Xingcheng,Li Yonghong,Ren Hengshan.Random response analysis of heavy duty-trucks with equilibratory suspensions[J].Journal of Hunan University:Natural Science,2005,32(2):25-28.
[6] 李相彬,赵又群.装有平衡悬架半挂汽车列车的平顺性建模与仿真分析[J].重庆理工大学学报:自然科学版,2011,25(11):18-23. Li Xiangbin,Zhao Youqun.Modeling and simulation of ride comfort of tractor semi-trailer with balanced suspension[J].Journal of Chongqing University of Technology:Natural Science,2011,25(11):18-23.
[7] GB/T 4970—2009汽车平顺性实验方法[S].北京:中国标准出版社,2009. GB/T 4970—2009 Method of Running Test-Automotive Ride Comfort[S].Beijing:China Standards Press,2009.
[8] 何仁,李丽.重型牵引车平顺性的预测与分析[J].机械设计,2008,25(3):56-59. He Ren,Li Li.Prediction and analysis of the easement of heavy tractor[J].Journal of Machine Design,2008,25(3):56-59.
[9] 郑忠华,马旭东.半挂汽车列车振动系统参数对行驶平顺性影响的灵敏度分析[J].专用汽车,1993(1):18-22. Zheng Zhonghua,Ma Xudong.Semitrailer train vibration system parameters sensitivity analysis of ride comfort[J].Special Purpose Vehicle,1993(1):18-22.
[10] 沈晓安.汽车行驶平顺性建模及其仿真研究[D].杭州:浙江工业大学,2005. Shen Xiao’an.Modeling and Simulation on Vehicle Ride Performance[D].Hangzhou:Zhejiang University of Technology,2005.
[11] 李贝贝.轻型载货汽车行驶平顺性建模仿真及试验研究[D].济南:山东大学,2008. Li Beibei.Light Truck Ride Performance Simulation and Experimental[D].Ji’nan:Shandong University,2008.
Effect of Structure Parameters and Model Processing Method of Tractor-Semitrailer Combination on the Ride Performance
Liu Xiandong1,Lv Haibo1,Zhang Hongwei2,Shan Yingchun1
(1.School of Transportation Science & Engineering,Beijing University of Aeronautics & Astronautics,Beijing 100191,China; 2.Research Institute of Highway,Ministry of Transport,Beijing 100088,China)
The half vehicle dynamics model with 11 degrees of freedom of the combination which was composed of 6×4 tractor and semi-trailer with 3 axles was eatablished. The effects of the processing methods of the equilibrator suspension system and the fully suspended cab on the ride performance of the combination were investigated by frequency domain method under the excitation of road roughness. and then MATLAB was used to compile program. Further, the research on the effects of the parameters of suspension stiffness and damping, tire stiffness, fifth-wheel lead and the centroid position of goods on the ride performance of the combination were also carried out, and these effects were sorted by magnitude. The results of the two models were compared. These efforts will provide some theoretical guidance for the design of semi-trailer tractor combination and the match between tractor and semi-trailer.
vehicle engineering; tractor-semitrailer combination; ride performance; match; structure parameter
10.3969/j.issn.1674-0696.2015.05.28
2012-10-22;
2014-12-06
交通运输部科技项目(2011318223450)
刘献栋(1966—),男,河北赵县人,教授,博士,主要从事车辆系统动力学及振动与噪声控制领域方面的研究。E-mail:liuxiandong@buaa.edu.cn。
U 695.2
A
1674-0696(2015)05-139-06
