城市道路人行横道夜间最高车速限制研究
2015-06-10郭玉峰程国柱吴立新莫宣艳
郭玉峰,程国柱,吴立新,徐 亮,莫宣艳
(1. 长春工程学院 土木学院,吉林 长春 130012; 2. 哈尔滨工业大学 交通科学与工程学院,黑龙江 哈尔滨 150090; 3.吉林建筑大学 交通科学与工程学院,吉林 长春 130018)
城市道路人行横道夜间最高车速限制研究
郭玉峰1,程国柱2,吴立新3,徐 亮1,莫宣艳2
(1. 长春工程学院 土木学院,吉林 长春 130012; 2. 哈尔滨工业大学 交通科学与工程学院,黑龙江 哈尔滨 150090; 3.吉林建筑大学 交通科学与工程学院,吉林 长春 130018)
通过驾驶人夜间对过街行人的视认距离试验,分析了夜间过街行人特征对驾驶人视认能力的影响,以及不同照度条件下的驾驶人夜间视认距离随行驶速度的变化规律,构建了3者间的关系模型,给出了城市道路人行横道处夜间最高车速限制值的确定方法。研究结果表明:驾驶人夜间视认距离与行驶速度、平均光照强度分别呈负线性和正对数关系;应用所提出的方法实施最高车速限制,可以保证驾驶人夜间视认过街行人以后具有足够的安全停车距离。
交通工程;人行横道;夜间;视认距离;最高车速限制
据统计,城市道路夜间过街行人伤亡人数约占道路交通事故伤亡总人数的1/10[1]。因此,对城市道路人行横道处实施机动车夜间最高车速限制,具有十分重要的意义,但我国的道路交通安全法并未给出明确的夜间车速限制值。基于此笔者拟开展城市道路夜间人行横道处最高车速限制的研究。
国外相关研究主要包括:夜视系统研发、夜间驾驶人视认能力等。J.H.Lim等[2]分析了两种夜视系统对驾驶人视认能力的影响;K.Fuchs等[3]评价了驾驶人与夜视系统的相互作用;T.Brown等[4]研究认为,夜视系统有助于改善驾驶人的视认能力,但会给驾驶人带来额外的工作任务;J.H.Lim等[5]构建了夜视系统辅助条件下驾驶人对行人的视认行为模型;J.M.Wood等[6-7]研究认为,颜色、灯光种类、眩光是影响驾驶人夜间视认能力的主要因素;无论是青年、中年,还是老年,所有驾驶人夜间视认能力都有所降低,而老年驾驶人夜间视认能力降低最为显著。
国内相关研究则包括:驾驶人夜间对障碍物、过街行人及交通标志的视认规律,高速公路夜间车速限制。赵炜华等[8-9]采用神经网络方法研究了驾驶人对障碍物的距离辨识规律;潘晓东等[10]开展了驾驶人夜间对交通标志的视认特征研究;姜军等[11]基于驾驶人夜间视认实验构建了计算指路标志位置的模型;程国柱等[12-14]对高速公路驾驶人夜间车速感知、距离视认及车速限制进行了研究。
综上所述,国内外的相关研究主要涉及夜视系统、驾驶人夜间视认特性、高速公路夜间最高车速限制等方面,但针对过街行人安全而开展的夜间最高车速限制研究则未见报道。鉴于此,笔者拟研究给出城市道路人行横道夜间最高车速限制值计算方法并给出建议值。
1 驾驶人夜间视认距离试验
1.1 过街行人特征的影响
过街行人特征包括:行人数量、运动状态和衣服颜色,针对三个影响因素开展了两种不同情况(过街行人数量分3名和1名、状态分为1.5 m/s速度过街和静止、衣服颜色分为深色与浅色)下的对比试验。为消除不同因素的交互影响,第1组试验的过街行人特征设定为静止且着深色衣服;第2组试验的过街行人特征设定为1名着深色衣服的行人;第3组试验的过街行人特征设定为1名静止行人。试验总样本量为448,驾驶人平均视认距离见图1。
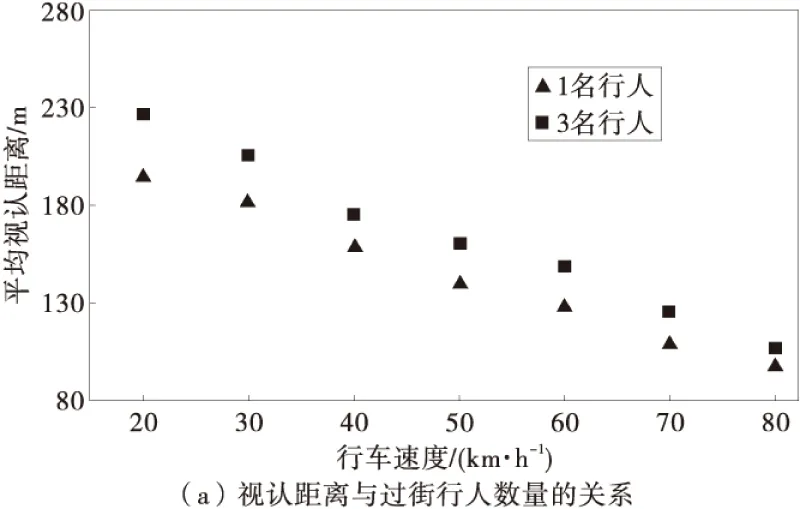
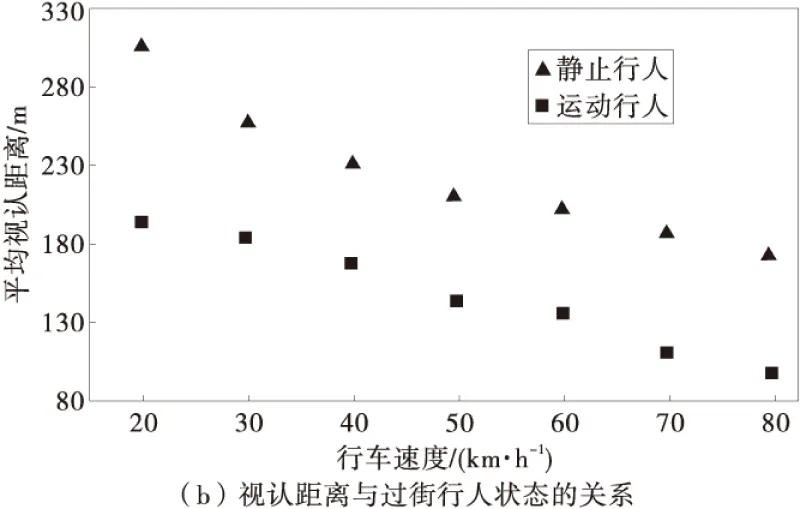
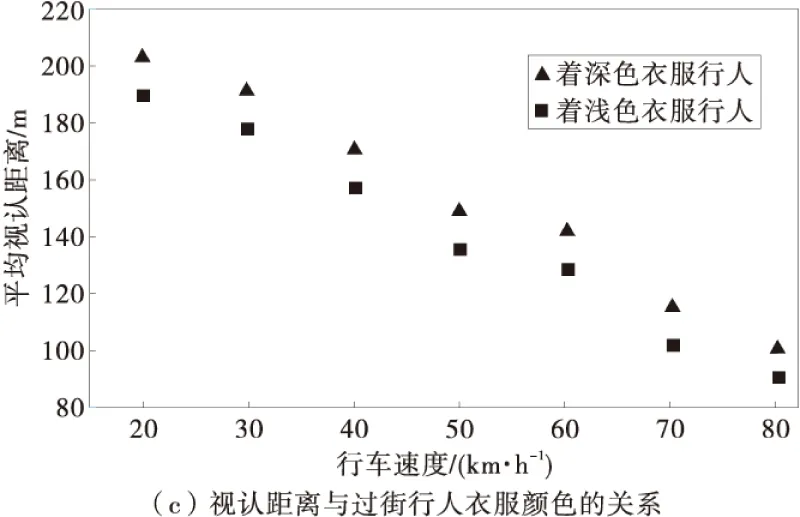
图1 驾驶人夜间视认距离与过街行人特征之间的关系Fig.1 Relation between driver recognition distance at night and pedestrians’ feature
由图1可见:过街行人数量较多时驾驶人能够较早发现行人,有利于过街行人的安全;过街行人运动时,驾驶人对运动行人的视认距离比静止行人有较大幅度的提高;夜间过街行人衣服颜色对驾驶人视认有一定的影响,与深颜色相比,浅颜色更易被驾驶人视认;此外,行驶速度越高,驾驶人对过街行人的视认性越差。
根据上述分析,笔者在设计试验方案时考虑最不利情况,设定的过街行人特征为:1个行人、静止、衣服深色。
1.2 试验方案
本研究选择哈尔滨市江北区总长6 km的6处试验路段,试验时间为20:00—24:00。8名驾驶人参加了本次测试,采用台湾泰仕仪器仪表有限公司生产的TES-1330A型照度计测量人行横道处的路灯照度值(路面单位面积上所接受可见光的能量,用于指示光照的强弱和路面表面积被照明程度的量)。
1) 在车辆行进一侧的人行横道上选择路缘线与路中线之间的5个等分点,观测各等分点的照度,取其均值作为平均光照强度E。
2) 驾驶人以速度V匀速行驶,当发现并辨别出布置于人行横道处的过街行人时告知坐于副驾驶位置的记录员,然后继续保持速度V匀速行驶。
3) 记录员采用秒表记录驾驶人视认出过街行人的时刻 (记为T1)及车辆行驶到人行横道处的时刻(记为T2)。
4) 计算驾驶人视认距离:S=V×(T2-T1)。
为每位驾驶人共设置7组不同行驶速度的试验,7组试验的行驶速度V分别取为20,30,40,50,60,70和80 km/h。
2 数据分析与模型构建
2.1 试验数据分析
笔者采集的试验数据见表1。从表1中可以看出,驾驶人夜间对过街行人的视认距离随着行车速度的提高呈现为下降趋势。由于城市道路均建有照明设施,驾驶员夜间通常会使用近光灯,而汽车近光灯照射距离一般仅为50~60 m,而观测的驾驶员视认距离数据最小值为75 m,即不需要考虑车辆灯光对驾驶人视认过街行人的影响。当照度值高于80 lx时,驾驶人夜间对过街行人的视认距离差异不大,行车速度为20 km/h时,视认距离平均值为196 m;随着车速度提高,驾驶人视认距离下降,当车速度提高到80 km/h时,驾驶人视认距离降低到94~97 m。当照度值低于60 lx时,驾驶人夜间对过街行人的视认距离值则存在差异,照度值分别为56,42和23 lx,行车速度为20 km/h时,驾驶员视认距离平均值分别为169,156和143 m;而随着车速度提高,驾驶人视认距离亦随之下降,当车速度提高到80 km/h时,驾驶人视认距离降低到81~85 m。

表1 驾驶人夜间视认距离数据
2.2 视认距离模型
对试验采集到的336个数据进行多元回归分析,可获取多组模型[15]。选择相关系数最高的模型作为驾驶人夜间视认距离与车速、平均光照强度的最优关系模型,模型具体形式如下:
SV=-1.5V+21.056ln(E)+120.5
(1)
式中:SV为驾驶人夜间视认距离,m;V为汽车行驶速度,km/h;E为人行横道处平均光照强度,lx。
为验证模型的有效性,选取E=150 lx时的实测值与模型计算值进行比较,计算得出模型计算误差,结果如表2。

表2 E=150 lx时驾驶人视认距离实测值与模型计算值比较
由表2可知,模型相对误差最大值为9.28%,最小值为0.51%,平均相对误差为3.21%,可以满足要求。
3 人行横道处最高车速限制
3.1 安全行车条件判别
为确保驾驶人夜间行车时具有足够的制动反应时间,需满足式(2)的要求:
SV≥ST
(2)
ST=SR+SB+S0
(3)
式中:ST为汽车安全停车距离,m;SR为制动反应距离,即驾驶人制动反应时间内车行驶的距离,m;SB为制动距离,m;S0为安全距离,可取5~10 m,笔者取8 m(中间值)。
相关文献提出的驾驶人制动反应时间数据如表3[16],笔者取表3中的95%位特征值,即2.45 s,则:SR= 2.45v。
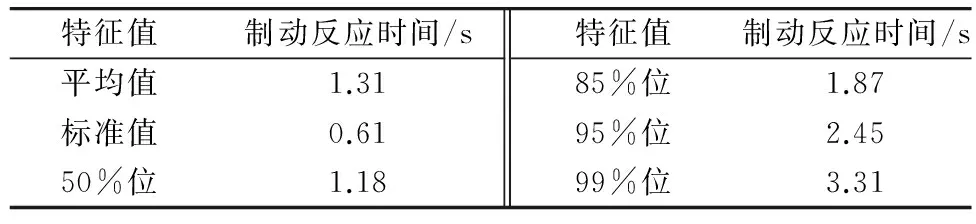
表3 驾驶人制动反应时间
注:平均值为驾驶人制动反应时间观测样本的期望与标准差。
制动距离可按式(4)计算[17]:
(4)
综上,汽车安全停车距离ST可按式(5)计算:
(5)
3.2 夜间最高限速值确定方法
在光照强度确定的情况下,满足行车安全的临界条件为:SV=ST。将式(1)、式(5)代入,可计算得出最高安全速度值vf,如式(6):
(6)
按照式(6),对不同光照强度条件下的试验路段限速值进行计算,结果如表4。
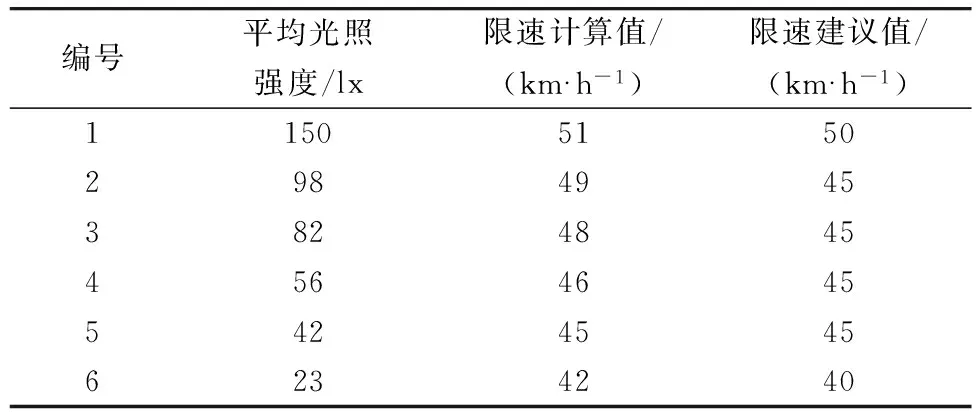
表4 不同光照强度下试验路段限速值
由表4可见,随着光照强度的降低,最高限速值递减。此外,在实际应用时,参照交通管理部门制定的限速值均为5 km/h的整数倍的做法,应对表4中的限速计算值进行向下取整,如表4的最后1列。
4 结 论
1) 过街行人数量、运动状态及衣服颜色是影响驾驶人夜间视认能力的主要因素。
2) 在夜间光照强度及过街行人特征相同的情况下,驾驶人视认距离与行驶速度负相关,即行驶速度越高,驾驶人对过街行人的视认距离越小。
3) 笔者给出的夜间最高车速限制值计算方法可以确保驾驶人在发现过街行人后具有足够的制动反应时间,以避免人车碰撞事故发生。
值得指出的是,笔者所提出的限速值为夜间低照度条件下的安全车速值,若用于白天则趋于保守,因此,可以实施昼夜不同限速值,即在同一限速标志版面上分别给出昼夜限速值。
[1] 翟良贵,丁靖艳,章金根.行人过街特征分析及自我保护对策[J].辽宁警专学报,2004(4):61-63. Zhai Lianggui,Ding Jingyan,Zhang Jin’gen.Characteristic analysis of pedestrian’s crossing streets and self-protection countermeasures [J].Journal of Liaoning Police Academy,2004(4):61-63.
[2] Lim J H,Tsimhoni O,Liu Y.Investigation of driver performance with night vision and pedestrian detection systems,part I:empirical study on visual clutter and glance behavior [J].IEEE Transactions on Intelligent Transportation Systems,2010,11(3):670-677.
[3] Fuchs K,Abendroth B,Bruder R.Night vision-reduced driver distraction,improved safety and satisfaction [C]//Proceedings of the 8th International Conference on Engineering Psychology and Cognitive Ergonomics.Berlin:Springer-Verlag,2009:367-375.
[4] Brown T,He Y,Roe C,et al.Is better- Night vision enhancement system’s pedestrian warning modes and older drivers [J].Annals of Advances in Automotive Medicine,2010,54(1):343-350.
[5] Lim J H,Liu Y,Tsimhoni O.Investigation of driver performance with night-vision and pedestrian-detection systems-part 2:queuing network human performance modeling [J].IEEE Transactions on Intelligent Transportation Systems,2010,11(4):765-772.
[6] Wood J M,Tyrrell R A,Carberry T P.Limitations in drivers’ ability to recognize pedestrians at night [J].Human Factors,2005,47(3):644-653.
[7] Wood J M,Owens D A.Standard measures of visual acuity do not predict drivers’ recognition performance under day or night conditions [J].Optometry and Vision Science,2005,82(8):698-705.
[8] 赵炜华,刘浩学,赵建有,等.基于BP神经网络的驾驶员昼夜动态空间距离判识规律[J].中国公路学报, 2010,23(2):92-98. Zhao Weihua,Liu Haoxue,Zhao Jianyou,et al.Law of BP neural network-based space distance cognition of driver in dynamic environment at day and night [J].China Journal of Highway and Transport,2010,23(2):92-98.
[9] 赵炜华,刘浩学,毕仁忠,等.驾驶员对夜间红绿障碍物空间距离判识差异[J].重庆交通大学学报:自然科学版,2009,28(6):1079-1082. Zhao Weihua,Liu Haoxue,Bi Renzhong,et al.Cognition difference of drivers about space distance of red and green obstacles at night [J].Journal of Chongqing Jiaotong University:Natural Science,2009,28(6):1079-1082.
[10] 潘晓东,林雨,郭雪斌,等.逆光条件下交通标志的可视距离研究[J].公路交通科技,2006,23(5):118-120. Pan Xiaodong,Lin Yu,Guo Xuebin et al.Research on traffic sign discernible visual range under backlighting condition [J].Journal of Highway and Transportation Research and Development,2006,23(5):118-120.
[11] 姜军,陆建,李娅.基于驾驶人视认特性的城市道路指路标志设置[J].东南大学学报:自然科学版,2010,40(5):1089-1092. Jiang Jun,Lu Jian,Li Ya.Setting of road guide signs based on driver’s recognition characteristics [J].Journal of Southeast University:Natural Science Edition,2010,40 (5):1089-1092.
[12] 程国柱,胡立伟,韩娟.高速公路驾驶员昼夜感知速度变化规律[J].东南大学学报:自然科学版,2012,42(3):547-550. Cheng Guozhu,Hu Liwei,Han Juan.Variation rule of driver’s perception speed on freeway during daytime and nighttime [J].Journal of Southeast University:Natural Science Edition,2012,42(3):547-550.
[13] 程国柱,薛长龙,韩娟.高速公路驾驶员昼夜识别距离变化规律[J].西南交通大学学报,2012,47(6):996-1002. Cheng Guozhu,Xue Changlong,Han Juan.Changing rule of driver’s recognition distance in daytime and nighttime on freeway [J].Journal of Southwest Jiaotong University,2012,47(6):996-1002.
[14] 程国柱,韩娟.高速公路夜间最高车速限制研究[J].中国公路学报,2013,26(2):147-153. Cheng Guozhu,Han Juan.Maximum speed limit on freeway at night [J].China Journal of Highway and Transport,2013,26(2):147-153.
[15] 程国柱,徐慧智,莫宣艳.驾驶员夜间对过街行人的视认规律[J].哈尔滨工业大学学报,2013,45(6):65-70. Cheng Guozhu,Xu Huizhi,Mo Xuanyan.Driver’s recognition rule for crossing pedestrian at nighttime [J].Journal of Harbin Institute of Technology,2013,45(6):65-70.
[16] 徐济宣,吴纪生.恶劣环境对驾驶人反应时间的影响研究[J].交通标准化,2009 (23):103-106.
Xu Jixuan,Wu Jisheng.Harsh environment influence on driver’s response time [J].Transport Standardization,2009(23):103-106.
[17] 袁浩,史桂芳,黄晓明,等.停车视距制动模型[J].东南大学学报:自然科学版,2009,4(12):859-862. Yuan Hao,Shi Guifang,Huang Xiaoming,et al.Braking model of stopping sight distance [J].Journal of Southeast University:Natural Science Edition,2009,39(4):859-862.
Maximum Speed Limit for Crosswalk of Urban Road at Night
Guo Yufeng1, Cheng Guozhu2, Wu Lixin3, Xu Liang1, Mo Xuanyan2
(1. School of Civil Engineering, Changchun Institute of Technology, Changchun 130012, Jilin, China; 2. School of Transportation Science & Engineering, Harbin Institute of Technology, Harbin 150090, Heilongjiang, China; 3. School of Transportation Science & Engineering, Jilin Jianzhu University, Changchun 130018, Jilin, China)
Through experiment of driver distance recognition, the impacts of crossing pedestrian’s characteristics at night on driver recognition ability were analyzed. The regulation of driver recognition distance changing with driving speed at night was also studied under different average luminance. Relationship model among above three variants was established. Calculation method of maximum speed limit value for crosswalk of urban road at night was given. Results show that there are negative linear and positive logarithm relation between driver recognition distance at night and driving speed, average luminance respectively. The presented method is applied to carry out the maximum speed limit for crosswalk at night, which can ensure driver’s enough safe stopping distance after recognizing crossing pedestrian at night.
traffic engineering; crosswalk; night-time; recognition distance; maximum speed limit
10.3969/j.issn.1674-0696.2015.05.21
2014-06-17;
2014-07-31
吉林省科技发展计划项目(20140204026SF);吉林省教育厅“十二五”科技研究规划项目(120150056)
郭玉峰(1977—),男,吉林长春人,副教授,主要从事道路交通安全方面的研究。E-mail:ccgcxygyf@163.com。
吴立新(1970—),女,吉林长春人,教授,主要从事道路交通安全方面的研究。E-mail:wulixinjt@126.com。
U491
A
1674-0696(2015)05-106-04
