塔吊高效运行控制器算法研究
2015-06-09刚管赟陈忠孝薛永才
秦 刚管 赟陈忠孝薛永才
(1.西安工业大学电子信息工程学院 陕西西安 710021;2.69220 部队 新疆库车县 842000)
塔吊高效运行控制器算法研究
秦 刚1管 赟1陈忠孝1薛永才2
(1.西安工业大学电子信息工程学院 陕西西安 710021;2.69220 部队 新疆库车县 842000)
0 引言
为了使速度变换更加平滑以及负载的防摆更加有效,使用合适的控制算法来使塔吊控制系统实现安全高效的运行。采用双闭环控制算法,其中外环即电流环只是以跟踪性能为主,所以采用常规PID。而内环即转速环,采用模糊PID控制算法,这种算法除了可以使系统在输入量为时变时有较好的动态性能之外,当系统的参数发生变化即受到干扰或负载变化的情况下,系统可以拥有较好的调节性能,并选择最优的路径和速度,由于最优路径的控制没什么实际的意思,故高效运行主要是最优速度的高效。
1 模糊自适应PID控制
1.1 模糊控制理论[1]
模糊控制,是一种计算机数字控制技术,构成它的基础包括模糊集合论、模糊语言变量及模糊逻辑推理。它本质上是一种非线性控制,属于智能控制。模糊控制系统由模糊控制器、输入/输出接口电路、广义对象和传感器等组成,如图1所示。

图1 模糊控制系统框图
模糊控制器构成如图2所示。由图可看出输入标定、模糊化、模糊决策和模糊判决(解模糊)和输出标定部分构成了模糊控制器。模糊化过程对精确量进行模糊转化。它包括规则库和隶属关系两部分;模糊控制器设计的核心部分是模糊决策,它的作用是将已知的模糊输入量采用已知的控制规律和数据推导出对应的模糊输出量;解模糊也称为模糊判决,它是模糊控制器实现不可或缺的步骤。它将上述的模糊输出量转化为精确的输出量,从而得出可以控制的精确输出量。

图2 模糊控制器构成
输入接口的作用是将传感器测到的模拟量,进行模数量的相互转换后,将数字量给定模糊控制器,也就是实现A/D的转换。一般情况下,检测到传感器的输出值为电压值[2]。相对的,输出接口的作用是将经过模糊控制器处理之后的数字量转换为被控对象可以识别的模拟量,实现被控对象的控制,即实现D/A转换,转换后的值通常为电流值。A/D和D/A的选择对系统控制精度有重要的影响,因此选择时根据实际应用对象,对精度、转换时间都有严格的要求。广义对象可以有多种形式,可以是线性及定常的,也可以是非线性及非定常的量。例如,在本系统中的控制对象为交流电机,它就属于非线性系统。传感器可以检测到被测量的信息,并将检测到的信息,按规则转换成电信号或其他所需形式的输出信号。
上述模糊控制器的实现主要依靠软件编程,模糊控制算法具体实现过程为:主控采集被控对象的输出值,将输出值与系统给定值进行比较,计算出输出值与给定值之间的误差e,对误差e采用模糊控制,进行模糊化、模糊决策等的处理之后,输出精确的控制量,实现系统的控制。模糊控制的实现如图3所示。

图3 模糊控制算法框图
1.2 模糊PID控制原理
模糊控制的原理是将专家或者操作人员在实践中积累的经验教训进行总结提炼,从而推理出相关的控制量,进而将这些量用在后续的实验系统中。针对一些模型不确定和非线性的系统,难以建立其数学模型,模糊控制就是实现系统控制的一种行之有效的办法。
实际应用中,模糊控制的动态性能胜过静态性能,实际系统中的动态调整、动态响应的性能和响应速度都比较快,而它的静态性能却稍逊,因此造成了系统控制效果并不非常理想。由线性PID控制理论可知,KP,KI,KD3个参数决定着PID控制器的性能。因此,可以判断,既要保证系统的动态性能,又要系统的稳态控制精度,就要实现对以上3个参数的调整。结合上述PID控制结构参数变化时自整定性能较差及模糊控制中静态性能差的特点,给系统调节带来困难及模糊控制中静态性能差的特点,综合考虑两者的优缺点,并结合控制对象三相异步电机自身的特点,采用PID与模糊控制结合的方法,即将PID控制引入到模糊控制当中的控制中,兼顾两者的优点,完成模糊PID控制器的设计,从而实现对三相异步电机的控制。这种方法兼顾了模糊控制的动态性能及PID控制精度较高的特点。
模糊PID控制,可以使系统既具有良好的动态性能,又具有良好的静态性能。模糊PID控制的结构原理框图如图4所示,KP,KI,KD的调整变化量分别采用图中的ΔKP,ΔKI,ΔKD表示。
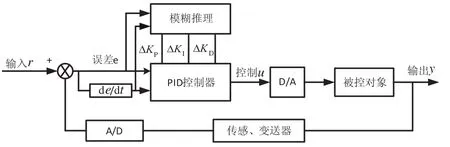
图4 模糊PID控制器结构原理框图
由模糊PID控制原理可知,控制中将误差e以及误差变化率ec作为模糊控制器的输入信号。系统在运行的过程中不断的对e和ec进行检测。对检测到的e和ec进行处理。
在对控制量进行处理时,第1步是根据模糊控制理论的相关内容把具体要用到的规则和操作以模糊量的形式表示,第2步将上步确定的相关内容写进相应的知识库当中,第3步就可以开始启动系统,持续监测2个输入量的变化情况,然后不断的进行实时的线上修改以及整定,以获得最好的性能。为了达到更好的控制效果,PID调节器的的3个输入参数要相互制约,按如下规则对参数进行整定:
a.|e|在值偏高情况下,一方面应适当调高KP的值,以期使系统的响应速度变得更快,另一方面必须把积分作用控制在适当范围内,取KI=0,以避免KP过快增高而导致的微分饱和现象。
b.在|e|和|ec|值相对适中情况下,KD取值应该在不高不低的适中范围内,以维持系统对信号的响应速度并且降低超调量。
c.|e|在值偏低或者和预先设置的值相近的情况下,一方面应该调高KP和KD的取值,增强系统稳定性,另一方面KD取值要适中,减少因干扰导致振荡的概率。
d.|ec|在值偏高的情况下,要适量降低KP大小;ec偏小的情况下,增大KP的大小。
1.3 模糊PID控制器的设计[3]
采用二维输入三维输出的结构来设计模糊PID控制器,其中输入为吊重电机的转速误差e和转速误差变化率ec,输出为PID 3个参数的增量ΔKP,ΔKI和ΔKD
1.3.1 模糊化处理
输入量和输出量的模糊化处理是采用模糊控制的基础。模糊化处理[4],也称为模糊集合论方法,也就是将被控对象及反映它们的模糊概念看成一个模糊集合。合适的模糊化方法可以代表研究模型的建立过程,包含了处理这个模型的原理和技术。它可分为以下4个过程来处理,包括语言变量的确定、设计、定义语言值及隶属度的定义。档位设置时要综合考虑,不仅要从规则灵活性出发,也要考虑实际的可操作性。档位设置过多时,会导致模糊推理过程变得复杂,相应的计算机内存处理也就较多。档数设置过少时,可能达不到预期的控制效果,因此在档位设置过程中,要兼顾控制性能和整定时间两个要素。系统中选用三角形隶属函数。
1.3.2 模糊控制器的设计
模糊控制器设计中,将吊重电机速度的偏差e和速度偏差的变化ec作为输入,ΔKP,ΔKI,ΔKD作为输出变量。输入与输出变量选定之后,通过在Matlab窗口输入模糊控制命令fuzzy,启动模糊推理系统编辑器。系统启动后,点击文件中的新建文件,分别建立3个参数ΔKP,ΔKI,ΔKD的文件,文件名分别设定为dkp,dki,dkd,文件格式为.fis文件。接着,完成e和ec2输入变量和ΔKP,ΔKI,ΔKD3个输出变量的添加,添加通过在Edit下拉菜单中点击Add Variable…按钮来完成。每个变量的7个隶属函数为PB,PM,PS,ZO,NS,NM,对输入变量及输出变量的模糊论域进行设定,在此均设定为 {-6,6},隶属度函数如图5所示。
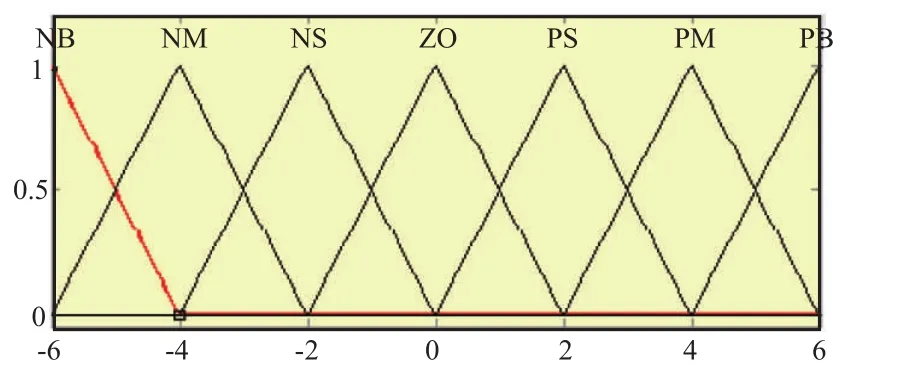
图5 隶属度函数
设计好的模糊PID控制器如图6所示,它将误e差及误差的变化率ec作为输入,并通过PB,PM,PS,ZO,NS,NM 7个语言值来表示。经过模糊控制器的每一步处理,最终输出PID的参数KP,KI,KD。

图6 模糊控制器
1.3.3 解模糊判决
解模糊判决[3]是实现输出控制的关键,因此解模糊判决方法的选定对系统的输出有重要的影响。解模糊判决常用的有3种方法,每种方法各有其特点,在此不一一赘述。通过比较其优缺点及适用性,对于解模糊判决采用加权平均法实现,该方法是对模糊集中的输出元素求加权平均值,它的表达为:

模糊控制器需要的最终输出量为ΔKP,ΔKI,ΔKD,即经过模糊控制修正的PID参数量为:

2 准时间最优控制算法[1,5,6]
塔吊起升装置在启动到稳定运行需要一个过程,而这个过程的运行时间在安全的情况下越少就可以一定程度上提高塔吊装置的运行效率,达到高效运行的目的。使用双闭环控制的一个重要目的就是要获得接近于图7所示的理想快速启动过程。

图7 理想的快速启动过程
双闭环调速系统突加给定电压U由静止状态启动时,转速和电流的动态过程如图8所示。由于在启动过程中转速调节器经历了不饱和、饱和、退饱和三种情况,整个动态过程就分为下图中表明的Ⅰ,Ⅱ,Ⅲ3个阶段。

图8 双闭环调速系统启动过程的转速和电流波形
第1阶段是电流上升阶段,还不能转动,当Id大于Id L后,电动机开始起动。
第2阶段是恒流升速阶段,是起动过程中的主要阶段。系统的加速度恒定,转速呈线性增长。
第3阶段是转速调节阶段,超速调节,电动机仍加速,使转速超调,知道转速达到峰值,伺候,电动机开始在负载的阻力下减速,知道稳定。
在塔吊起升装置启动过程中,在设备允许的条件下实现最短时间的控制称作“时间最优控制”,对于塔吊的起吊而言,在交流电机允许过载能力限制下的恒流启动,就是所谓的时间最优控制[7]。在电机最大容许电流和转矩受限制的条件下,应该充分利用电机的过载能力,最好是在过渡过程中始终保持电流为允许的最大值,使起吊装置以最大的加速度启动,到达稳定转速时,立即让电流降下来,使转矩马上与负载平衡,从而转入稳态运行。这种运行状态就是时间最优控制的运行状态。但是由于在启动过程的前两个阶段中电流不能突变,实际启动过程和理想启动过程相比还有一些差距,不过这两段时间只占全部启动时间中的很小部分,无伤大局。采用饱和非线性控制的方法实现准时间最优控制是一种很有实用价值的控制策略。但是在这之前受到干扰的影响就是来自负载扰动和电网电压扰动的干扰,这样才能实现起升装置的顺利启动。
3 结束语
国内现有的塔式吊车的安全控制系统以监控为主,调速性能和运行效率都不理想。所研究安全高效的塔吊控制系统,在避免事故发生的基础上实现塔吊系统的自动检测和控制,在以上2种算法的基础上实现塔式吊车在安全基础上的高效运行,也实现了对于吊重的重量的检测,最终代替人工操作实现塔吊的自动运行。
[1] 李芬.模糊控制在双闭环直流调速系统中的应用[J].大连轻工业学院学报,2001(4):275- 278.
[2] 郑力新,周凯汀,王永初.变结构调节器在双闭环直流调速系统中的应用[J].机电一体化,2001(6):49- 52.
[3] 王立新.模糊系统与模糊控制教程[M].王迎军,译.北京:清华大学出版社,2003.
[4] 焦斌,董枫,樊秀芬.神经元控制器在直流调速系统中的仿真研究[J].计算机仿真,2004(8):118- 120.
[5] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,1992.
[6] 卢建强,孙培德,顾宝龙.专家控制用于双闭环直流调速系统中[J].电气时代,2004(12):130- 132.
[7] 郑力新,周凯汀,玄光男.遗传算法在双闭环直流调速系统在线优化中的应用[J].机电一体化,2001(2):22 -24.
Crane Efficient Operation Controller Algorithm Research
QIN Gang1GUAN Yun1CHENG Zhongxiao1XUE Yongcai2
(1.Xi’an Technological University,Electronic information engineering college,Xi’an 710021 China;2.69220 Forces Kuqa 842000,China)
目前国内外的塔吊装置都是以安全监控为主,针对实现塔吊高效运行的目的采用双闭环控制算法,其中外环即电流环只是以跟踪性能为主,所以采用常规PID。对于内环即转速环,采用模糊自适应PID算法,除了可以使系统在输入量为时变时有较好的动态性能之外,当系统的参数发生变化即受到干扰或负载变化的情况下,系统可以拥有较好的调节性能。从而极大的提高了工作效率。另外在塔吊的起身机构从启动到稳定的快速平滑的运行采用准时间最优控制算法来实现。最终实现辅助塔吊进行高效运行的目的,即完成对塔吊高效运行控制器的设计目的。
运行效率 ;双闭环控制;常规PID;模糊自适应PID;准时间最优控制
Safety monitoring of crane devices is a high priority in China and abroad.In order that the crane works effectively with a double closed loop control algorithm,the outer ring is current loop is designed for mainly tracking purposes,so the conventional PID is used.For the inner ring,also known as the rotation speed loop,the fuzzy adaptive PID algorithm is used;in addition to being able to make the system have good dynamic performance when different time variables are inputted,when the system parameters change due to interference or load change,system can have good adjustment performance.Thus the work efficiency is greatly improved.In the crane and other rising mechanisms,a time- accurate optimized control algorithm is used to achieve a smooth transitional operation from start to stable running.Ultimately the efficient operation of the crane,the optimal speed and efficient implementation are achieved.The design objective of an efficient crane controller is achieved.
operation efficiency;double closed -loop control;conventional PID;fuzzy adaptive PID;time optimal control
TN9
A
1001- 2257(2015)08- 0018- 04
秦 刚(1968—),男,陕西西安人,教授,硕士研究生导师,研究方向为电子工程、电子仪器与检测。
2015-04-17
陕西省科技厅工业攻关项目(2014K05- 06)。
