FSG15N1A触力传感器参数标定方法*
2015-06-09刘晓敏赵云伟郑永永刘洪波
刘晓敏,赵云伟,郑永永,刘洪波
(北华大学工程训练中心,吉林吉林 132021)
FSG15N1A触力传感器参数标定方法*
刘晓敏,赵云伟*,郑永永,刘洪波
(北华大学工程训练中心,吉林吉林 132021)
提出了一种FSG15N1A触力传感器标定方法。搭建了传感器标定实验装置,采用重物施压的方式进行了传感器标定实验,通过Freescale单片机进行数据采集和计算。获得了传感器输出采样值与负载质量的关系,并进行了标定误差分析,试验结果表明,该标定方法可以满足机械手手指夹持力检测精确要求。
触力传感器;标定实验;压力计
0 引 言
FSS小型力传感器具有精密可靠、价格低廉、功率小和无放大等特点,可应用于医疗注射泵、丝焊设备和机械手末端触觉等方面。传感器的测量精度受使用条件、方式和环境因素的影响,在使用前须对传感器进行标定[1]。大连海事大学提出了一种应用机器人系统对线结构光视觉传感器进行标定的新方法[2]。北京航空航天大学提出了一种基于双重交比不变的线结构光视觉传感器的标定方法[3]。王金桥等人提出了一种线结构光扫描传感器结构参数一体化现场标定的新方法,建立了线结构光扫描传感器的数学模型[4]。石炳存等人采用万用表和虚拟仪器在线的方法对称重传感器进行了标定,验证使用环境对标定结果的影响[5]。为了获得准确的FSG15N1A触力传感器输出压力方程,本文设计了传感器的标定实验装置,进行了不同载荷下传感器的标定实验。
1 传感器的工作原理
FSG15N1A触力传感器实物图,如图1所示。外部为不锈钢圆柱,内部包含硅敏感芯片。当钢柱受压与内部硅敏感芯片接触,导致硅压阻元件受压弯曲时阻值发生变化,桥路各电阻的变化产生对应的电压输出信号(图2)。

图1 FSG15N1A触力传感器
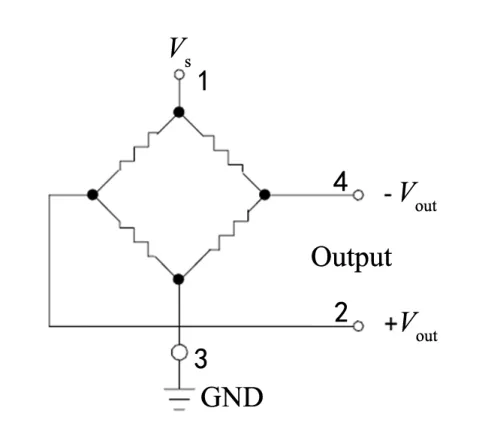
图2 励磁原理图
2 标定实验与分析
图3为自制的传感器标定实验装置。
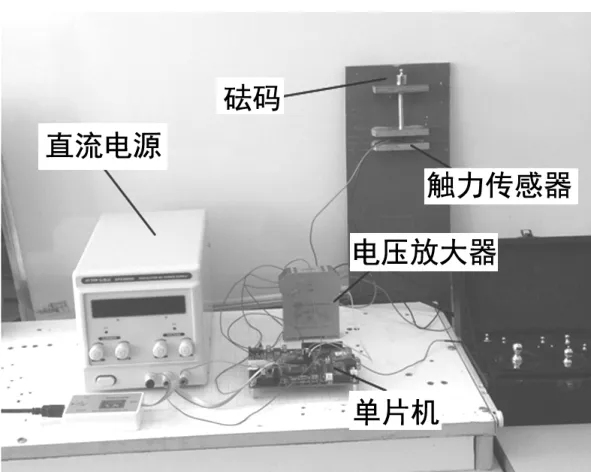
图3 传感器标定实验装置
该装置主要由Freescale单片机、电压放大器、直流源、砝码和施力装置组成。利用施力装置将重物载荷施加给传感器,输出的电压信号经由放大器放大后,由单片机进行采集后上传到计算机。通过测量引脚2和引脚4的压差,可以确定重物施加的压力(图2)。具体实验条件,如表1所列。
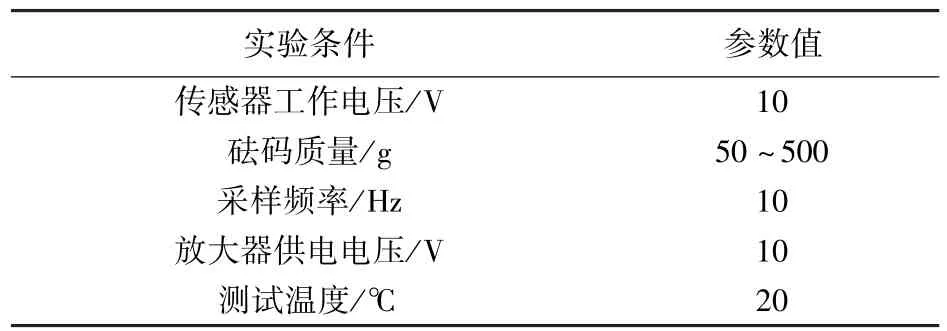
表1 实验条件
经发大器发大25倍后,根据采样点的数目取平均值,可得传感器输出电压值随负载质量的变化,如图4所示。由图4可知,传感器输出的电压值随负载质量增加而增大,并呈线性变化。在负载较小时,传感器测量值存在较大偏差。在0点偏差量为0.47 N。经过标定实验拟合的输出力公式可以较好的描述传感器在不同载荷下的特性。
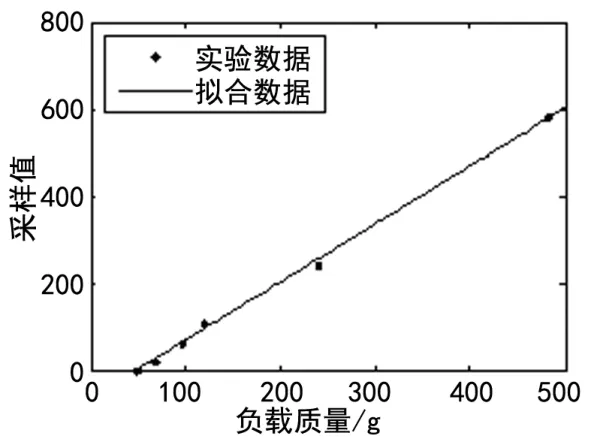
图4 加载荷与输出电压关系
由测得的实验数据,经拟合可以得到传感器输出的采样值与压力方程为:

式中:x为单片机读取的采样值。
传感器测量精度评价数据,如表2所列。由表2可知,传感器测量负载质量均方根值误差为2 g(0.02 N),完全满足机械手手指夹持力检测精确要求。
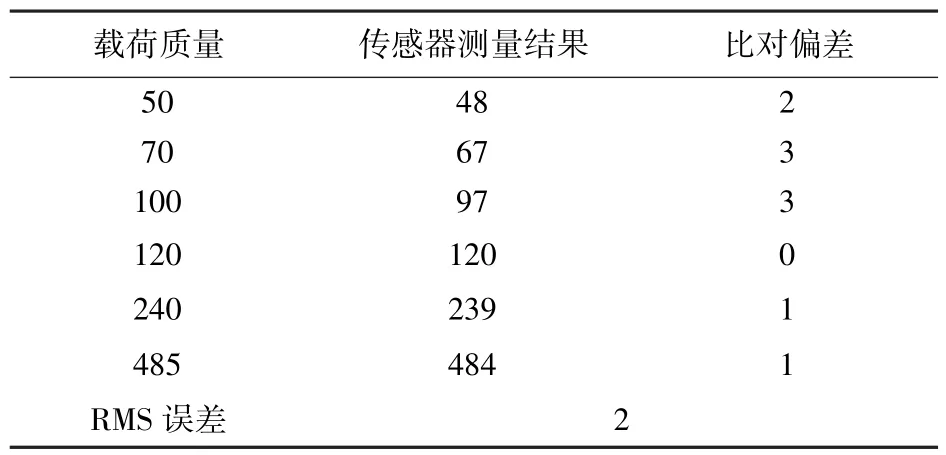
表2 传感器测量精度评价数据 /g
3 结 论
通过自制的传感器标定装置,进行了传感器在不同载荷下的标定实验,获得了输出力经验公式。标定传感器测量误差不超过0.02 N,因此提出的标定方法,可很好的满足机械手手指夹持力检测精确要求。
[1] 马锦垠,梁 斌.传感器标定数据处理方法对爆炸压力测量误差的影响[J],电子测量技术,2012,35(6):58-61.
[2] 林 娜,马 孜,胡 英,等.基于机器人系统的线结构光视觉传感器标定新方法[J].传感器与微系统,2007,26(9):101-103.
[3] 魏振忠,张广军,徐 园.一种线结构光视觉传感器标定方法[J].机械工程学报,2005,41(2):210-214.
[4] 王金桥,段发阶,刘博文,等.线结构光扫描传感器结构参数一体化标定[J].传感技术学报,2014,27(9):251-252.
[5] 石炳存,王源水.标定方法对称重传感器标定的影响[J].宁夏工程技术,2005,4(3):251-252.
Calibration Method to Parameters of FSG15N1A Contact Force Sensor
LIU Xiao-min,ZHAO Yun-wei,ZHENG Yong-yong,LIU Hong-bo
(Engineering Training Center,Beihua University,Jilin Jilin 132021,China)
The calibration method to parameters of FSG15N1A contact force sensor is put forward in this paper.The experimental device for calibration is set up,and data collection and calculation are carried out by the Freescale single chip microcomputer(SCM).Consequently,the relationship between samples output by sensor and the load weight is acquired and then the calibration error is analyzed.The results show that the calibration method can satisfy the accuracy requirements to measure the clamping force of the robot hand fingers.
contact force sensor;calibration experiment;pressure gauge
TP212.1
A
1007-4414(2015)05-0134-02
10.16576/j.cnki.1007-4414.2015.05.046
2015-07-28
吉林省科技发展计划项目(编号:20150520109JH);吉林省教育厅“十二五”科学技术研究(编号:20150158);吉林市科技创新发展计划项目(编号:201464043),(编号:20156413),北华大学博士启动基金。
刘晓敏(1980-),女,吉林吉林市人,讲师,博士,研究方向:机械设计及理论,机器人技术。
赵云伟(1978-),男,吉林吉林市人,讲师,博士,研究方向:智能精密制造,机器人技术。