泵车布料软管姿态检测传感器研制
2015-06-08陈新元张俊峰杨海清
余 峰,陈新元,李 勇,张俊峰,杨海清
(1.武汉科技大学机械自动化学院,湖北武汉 430081;2.山推楚天工程机械有限公司,湖北武汉 430200)
泵车布料软管姿态检测传感器研制
余 峰1,陈新元1,李 勇2,张俊峰2,杨海清2
(1.武汉科技大学机械自动化学院,湖北武汉 430081;2.山推楚天工程机械有限公司,湖北武汉 430200)
泵车臂架随动控制需要检测布料软管的方位角,控制器根据检测数据识别操作工人期望的布料方位,自动协调控制驱动液压缸,实现臂架随动跟踪功能。布料软管工作环境恶劣,低频振动干扰严重,针对其实际工况,设计了一种应变式的姿态检测传感器,简述了传感器的基本结构和工作原理,加工传感器原理样机,搭建实验系统,进行了静态和动态检测实验。结果表明该传感器的方位角检测误差为0.56%,响应时间为15 ms,满足混凝土浇筑时操作工人通过拖拽布料软管来传递期望布料方位的检测需求。
传感器;混凝土泵车;臂架智能控制;布料软管;姿态检测
0 引言
随着建筑业的蓬勃发展,为了适应激烈的市场竞争,混凝土泵车正朝着智能化方向发展,臂架随动控制是焦点之一[1-2]。臂架智能随动控制,是在布料软管上安装姿态检测传感器(图1所示),实时检测布料软管的方位角,控制器根据检测数据识别操作工人期望的布料方位,自动协调控制驱动液压缸,实现臂架随动跟踪功能的一种便捷浇筑施工模式。泵车臂架在工作过程中会产生低频振动,频率约为0.3~0.5 Hz[3-4],与操作工人拖拽布料软管的操作频率混杂。文献[5]的研究中也遇到类似频率混杂工况,选用美国Jewel公司LCF196二轴重力加速度传感器测钻柱姿态,研究表明这类传感器灵敏度高,对微小的干扰振动信号非常敏感,单纯采用滤波技术,难以分离低频干扰信号;其次该类传感器价格昂贵,对智能臂架布料软管姿态检测这种较低精度工况,性价比差。本文针对泵车臂架布料软管的特殊工况,设计了一种低成本姿态检测传感器。

图1 泵车臂架随动控制
1 姿态检测传感器的结构
姿态检测传感器的结构如图2所示,主要由固定环、弹性片、应变片、接触球等组成。固定环由2个对开半环组成,起基座作用,用于固定传感器的其它组件,并将传感器安装在布料软管上;弹性片是传感器的敏感元件,共有3片,在固定环圆周呈120°均匀分布;弹性片的内侧和外侧各粘贴一块应变片,用于检测弹性片的变形量;接触球能减小工作时弹性片与布料软管壁之间相对滑移产生的摩擦力,抑制干扰,改善测量效果。

图2 姿态检测传感器结构
2 姿态检测原理
姿态检测传感器安装于布料软管指定位置。无外力作用时,布料软管呈竖直状态,传感器内的3个弹性片受力状态相同,矢量合成后合力为0,软管方位角也为0;当操作工人拖拽布料软管时,布料软管沿外力方向产生一定的弯曲量,通过3个接触球对相应的弹性片产生不同的作用力,弹性片受力产生变形,粘贴其上的应变片电阻发生变化,通过信号调理和数据采集,可获取3组应变信号,再根据传感器的检测原理进行合成计算,即可得到表明布料软管姿态的方位角。
由于对姿态检测传感器的3个弹性片施加有初始预紧力,传感器工作过程中,弹性片下端的接触球与布料软管外壁始终保持紧密相切接触,布料软管对弹性片作用力的方向始终沿布料软管径向,作用点为接触切点。将3个切点组成的平面作为测量平面,在测量平面上建立平面直角坐标系,规定方位角坐标系与该坐标系的x轴和y轴平行,如图3所示。3个弹性片的安装方位分别对应相对方位角的0°、120°、240°。F1,F2,F3为布料软管弯曲变形对3个弹性片接触球的附加作用力,对3个力进行平面矢量合成运算:
(1)
α′=arctan(Fy/Fx)
(2)
式(2)中α为合力F在直角坐标系第一象限时与x轴的夹角。
(3)
式(3)为Fx和Fy取不同值时,方位角α与α′的取值关系。
根据以上测量原理,通过测量布料软管对3个弹性片的压力,进而对3个力矢量合成就可求出方位角。

图3 方位角测量原理
3 弹性片应力分析与检测
3.1 弹性片应力分析
弹性片是姿态检测传感器的敏感元件,一端固定,另一端通过接触球受布料软管挤压力作用,如图2所示。在姿态传感器实际工作中,布料软管弯曲变形时对弹性片接触球的挤压力F可分解成垂直于弹性片的正压力FN和垂直于正压力FN的切向力FT。设F作用点距离固定端为l,根据弹性片材料的线性叠加性,在距离固定端为m处的应力,由文献[6]和文献[7]可知:
(4)
式中:E为弹性片的弹性模量;WN为弹性片的正向抗弯弹性模量;WT为弹性片的切向抗弯弹性模量;εN为弹性片在测量截面处的正向应变;εT为弹性片在测量截面处的切向应变。
实际上由于产生切向应变εT的切向力FT不仅包含有布料软管对弹性片挤压力的分量,同时也包含弹性片与布料软管相对移动时的摩擦力,产生的正应变εN只有布料软管对弹性片的挤压力F的分量FN。在方位角测量原理中需要测量布料软管对弹性片的压力正是FN,因而在测量时通过贴片组桥的方式测得布料软管对弹性片的压力FN。
3.2 弹性片应力检测
在测量弹性片应力时,为了消除摩擦力对测量结果的影响,根据惠斯通电桥和差特性,选用半桥式电路进行连接,将2片工作应变片RD粘贴在弹性片前后两侧的对称位置,这样粘贴同时还有温度自补偿功能[8-9]。图4所示为其中1个弹性片应变测量电路简图。

图4 一个弹性片应变测量电路
图4中工作应变片RD和电桥平衡电阻RF组成半桥电路,仪用放大器AD620对电桥输出信号放大,设放大倍数为A(增益大小可由外接电阻RF调节,范围为1~1 000)。由于应变片电阻RD和平衡电阻RF不能绝对相等,因此用电位器RP调节电桥平衡零点。当桥路电阻与R2相等时,放大器A1为电桥提供恒定驱动电流,此时电桥输入电压为:
U=VCCR2/(R1+R2)
(5)
当弹性片受力变形时,设前后两侧的工作应变片阻值RD在正压力作用下的变化量为ΔRDN和ΔR′DN,在切向力作用下的变化量为ΔRDT和ΔR′DT,通过温度补偿后电桥输出电压为
(6)
式中:

则有
UO=ΔRU/2R=KεU/2
(7)
式中:K为电阻应变片的灵敏系数;ε为应变值。
由式(4)~式(7)可得
(8)

(9)
式(5)~式(9)表明,利用电桥的和差特性,通过恰当的贴片组桥就可以消除切向力对测量结果的影响,并由式(9)给出了弹性片受力FN与输出电压VOUT之间的比例系数λ。
4 实验验证与效果分析
搭建了如图5所示的实验装置,加工了应变式姿态检测传感器样机,进行实验验证。

图5 姿态检测传感器测试实验装置
布料软管上端固定于振动支架,振动试验台可以模拟布料软管在实际工作中产生的低频振荡。采用NI DAQPAD 6015数据采集卡采集姿态传感器弹性片上粘贴的工作应变片的应变信号,用LabVIEW软件对采集到的数据进行分析处理,其中试验用弹性片的尺寸参数如表1所示。

表1 试验弹性片结构参数
静态实验验证方位角的测量:先确定方位角零度,然后以恒定的速度缓慢拖动布料软管末端,将方位角从0°逐渐改变到360°,试验中每隔1 s读取1次测量数据,共读取25次数据,结果如图6所示。动态响应验证测试时,选取阶跃响应方式,方位角的初始角度为80°,终值为290°的阶跃输入信号;通过测试系统分别采集响应输出曲线,方位角α的阶跃响应如图7所示。

图6 方位角静态测量结果
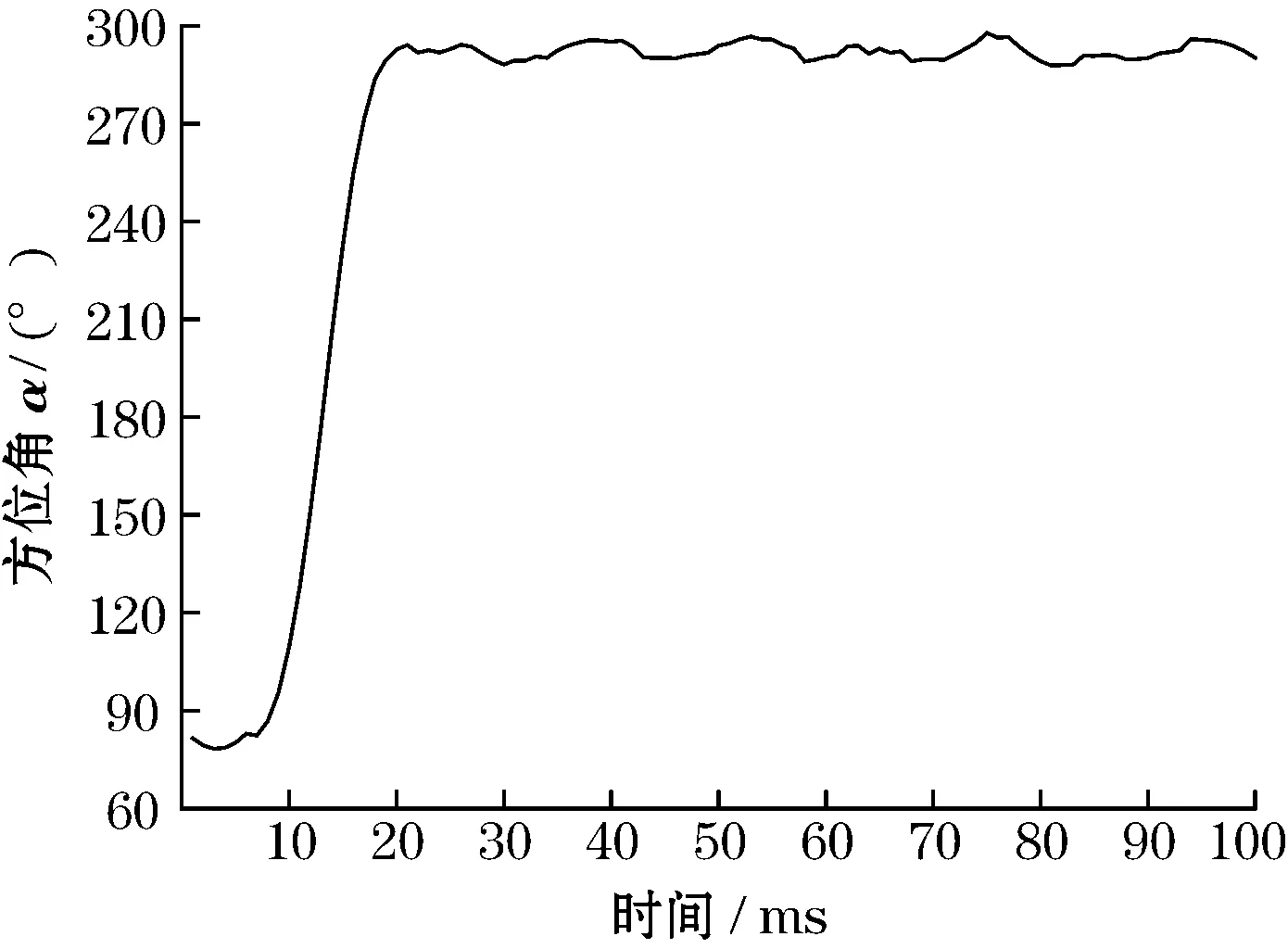
图7 方位角阶跃响应
将实测数据与给定值进行比较,图6中实测静态方位角最大误差为0.56%F.S.。在静态测量中实测结果与给定值存在一定误差,主要是由于弹性片加工精度、安装位置误差以及应变片粘贴方式等因素所致。
从图7所示实测方位角的阶跃响应曲线可以看出:方位角响应时间为15 ms,满足泵车臂架布料软管方位角动态测量要求。
5 结束语
本文针对混凝土泵车臂架末端布料软管姿态检测的特殊工况和要求,提出了采用基于应变原理的姿态检测传感器来检测泵车布料软管方位角的方法,介绍了传感器原理结构,进行了静动态实验验证。结果表明在误差允许的范围内,该方法能有效的检测到布料软管的方位角,从而为泵车臂架的智能控制提供一种高性价比的姿态检测传感器。
[1] 李家武,徐怀玉,丁美莲,等.混凝土泵车布料臂的发 展及趋势.建筑机械化,2005,26(11):26-29.
[2] CAZZULANI G,GHIELMETTI C,GIBERTI H,et al.A test rig and numerical model for investigating Tru-ck mounted concrete pumps.Automation in Construction,2011,20(8):1133-1142.
[3] 王斌华,吕彭民.混凝土泵车臂架系统振动机理的研究.振动与冲击,2011,30(9):259-263.
[4] 黄毅,吴斌兴,王佳茜.混凝土泵车臂架振动响应的主动控制实验研究.振动与冲击,2012,31(2):91-94.
[5] 刘白雁,苏义脑,陈新元.自动垂直钻井中井斜动态测量理论与实验研究.石油学报,2006,27(4):105-109[6] 刘鸿文.材料力学.第4版.北京:高等教育出版社,2004:140-147.
[7] 熊诗波,黄长艺.机械工程测试技术基础.北京:机械工业出版社,2006:17-130.
[8] 潘新安,王洪光,姜勇.一种机器人谐波减速器内嵌扭矩传感器的研制.仪器仪表学报,2014,35(1):154-161.
[9] 李宗兴,陈德勇,王军波.MEMS应变式结冰传感器设计与制作.传感技术学报,2011,24(8):1108-1113.
Design of Hose Attitude Detection Sensor for Concrete Pump Truck
YU Feng1,CHEN Xin-yuan1,LI Yong2,ZHANG Jun-feng2,YANG Hai-qing2
(1.College of Machinery and Automation,Wuhan University of Science and Technology,Wuhan 430081,China;2.Shantui Chutian Construction Machinery Co.,Ltd.,Wuhan 430200,China )
The pump truck boom servo control system needs to detect the azimuth angle of hose.According to the inspection data,the controller can recognize the operator’s expected hose position,and can automatically control the drive hydraulic cylinder to achieve the boom tracking function.However,the working environment of the hose is poor and it suffers serious low frequency vibration interference.To overcome these problems,a kind of movement detection of strain sensor was proposed according to the actual working condition.Basic constructs and working principles were introduced.After processing the prototype sensor and building experiment system,the static and dynamic detection experiments were tested.The results show that the errors for azimuth angle detection are 0.56%,and the response time for azimuth angle detection is 15ms.These errors and response time meet the concrete pouring operation detection requirements by dragging the hose to transfer the anticipation of hose angle.
sensor;concrete pump truck;boom intelligent control;hose;attitude detection
武汉市关键技术攻关计划资助项目(2014010202010090)
2015-04-14 收修改稿日期:2015-08-20
TH712
A
1002-1841(2015)12-0001-03
余峰(1989—),硕士研究生,研究方向为泵车臂架智能控制与减振。 E-mail:yiufeng@163.com
陈新元(1972—),博士,教授,研究方向为工业测控技术及仪器、机-电-液一体化系统设计、智能控制。 E-mail:chenxinyuan@wust.edu.cn
