一种用于危险品运输安全的智能车载终端的设计
2015-06-07潘道远宋晓磊石存杰
潘道远,宋晓磊,石存杰
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
一种用于危险品运输安全的智能车载终端的设计
潘道远,宋晓磊,石存杰
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
为了减少危险品公路交通运输事故的发生,提高运输效率以及运输过程中保护人-车-物安全,设计了一款用于危险品运输安全的智能车载终端。所设计的智能车载终端负责对驾驶员驾驶状态、车辆运行状态和危险品状态实时监控,并具有通信、导航和联网等功能。硬件部分主要包括通信导航模块、MEMS传感器模块、微处理器模块和电源处理模块等。终端软件系统由下位机软件和上位机软件组成,下位机软件负责系统初始化、传感器数据采集与处理;上位机软件负责调用下位机数据进行车辆状态显示,以及完成与驾驶员的交互操作。基于所设计的智能车载终端平台开展了实车道路试验,结果表明:该智能车载终端运行稳定、性能良好。
车辆工程;公路交通运输;危险品;智能车载终端;智能交通
随着我国社会经济的飞速发展,各行业对危险品原材料的品种和用量不断增加,危险品的运输数量也随之剧增,导致危险品运输对道路安全危害的风险逐步扩大[1]。据不完全统计,危险品运输事故占危险品事故总量的30%~40%,对人民的生命和财产造成巨大损失,严重影响社会的安定和团结[2]。因此,提高危险品运输的安全性迫在眉睫。
危险品运输已成为安全生产环节的重要风险源之一[3],而与之相关的运输监控、动态管理等已成为研究的难点[4-5]。我国已有相关生产企业开发出基于GIS和GPS的危险品运输安全监控平台[6],但是由于监控平台智能性程度不高,难以满足信息社会快速发展的要求。目前,我国对危险品运输安全的监控还处于初期发展阶段,主要表现在:①缺乏事前预防的车辆状态监控平台;②缺乏应急处理的管理信息服务平台;③缺乏事故救援的主动呼救报警平台[7]。为此,笔者开展了提高危险品运输安全相关技术的研究。为了实现在危险品运输全过程中对人-车-物的全面感知、动态监控、智能预警和应急求救,设计了一款用于危险品运输安全的智能车载终端。该智能车载终端能够极大地预防危险品事故的发生,并减少事故造成的损失。
1 总体方案设计
智能车载终端是集成车辆实时监测、位置追踪、前期预警和紧急救援于一体的综合管理平台,负责对驾驶员、车辆、危险品的状态进行实时监控。智能车载终端主要由各种MEMS传感器模块、卫星导航模块、无线通信模块和拨号联网模块组成,同时为了增强平台的人机交互性,配置有操作按键和显示屏幕。车载终端通过各种MEMS传感器模块实时获取人-车-物的状态信息。车载终端微处理器对状态信息进行处理,并与安全阈值进行比较。当比较结果显示监测数据接近安全阈值时,智能车载终端发出警示信息,提醒驾驶员谨慎驾驶;显示屏幕弹出警示内容,便于驾驶员采取相应措施,预防事故的发生。智能车载终端的总体结构如图1。
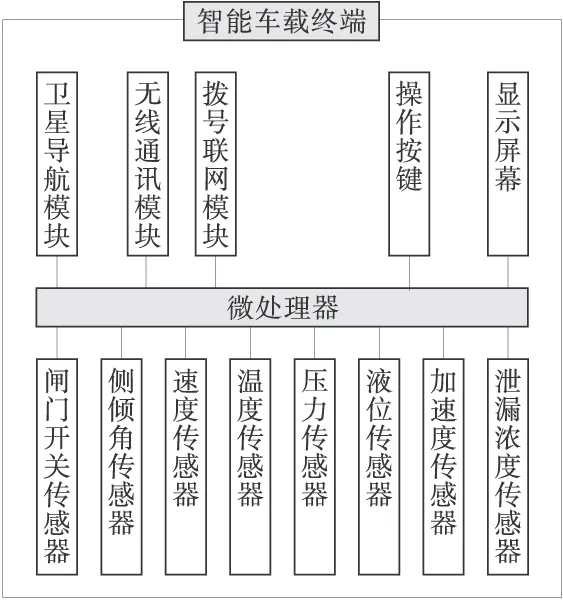
图1 智能车载终端总体结构
2 终端的硬件设计
智能车载终端的硬件设备主要包括电源处理模块、微处理器模块、通信导航模块和MEMS传感器模块等。电源处理模块主要负责将车载电压转换为可供车载终端各个模块使用的稳定直流电压。微处理器模块的作用是处理各种MEMS传感器采集的数据,并与安全阈值进行比较,根据比较结果确定车载终端的操作。通信导航模块集成GPS、GSM和GPRS通信模块,能够实现导航、联网和通信等功能。MEMS传感器模块负责对运输车辆和危险品的状态进行实时监测,并通过I/O端口向微处理器传输监测数据。
2.1 电源处理模块
电源处理模块是将车载电压转换为稳定可靠的直流电压供智能车载终端各个模块使用。车辆直接提供的电压有12 V和24 V。由于车载电源长期工作在恶劣环境下,输出电压不够稳定,对测控电路存在一定干扰,并且智能车载终端各个模块所需直流电压为3.3,4.0,5.0 V等3种电压[8],因此需要设计专门的电源处理模块对车载电压进行处理。智能车载终端的电源处理模块采用二级电压转换模式,第1级电压转换由车载12 V转换为5.0 V,第2级由5.0 V分别转换为3.3 V和4.0 V。第1级电压转换模块功率消耗较大,故选择LM2596开关电压调节器。第2级电压转换模块选择AMS1117线性稳压芯片进行5.0 V转换为3.3 V和LM2596Adj开关电压调节器进行5.0 V转换为4.0 V。
2.2 微处理器模块
MC9S12XET256是Freescale公司提供的一款32位性能微处理器,具有16位微处理器具备的效率和优势。其片上资源非常丰富,包括1个64 kb的RAM,2个16通道的12位D/A转换器,3个串行外设接口(SPI),8个异步串行通信接口(SCI),1个8通道的16位标准定时器模块(TIM)和2个内部IC的总线模块(IIC)。它具有功耗小、成本低、程序执行效率高和电磁兼容等优点。
2.3 通信导航模块
SIM908是一款集成GPS导航技术的四频GSM/GPRS模块,支持850,900,1 800,1 900 MHz 4种频段。将GPS和GPRS整合在SMT封装里,在GPS和GSM信号覆盖的地方能实现不同资产的无缝追踪,GPS支持冷、热启动方式,GSM支持PDU和文本模式,GPRS的最大速率为85.6 kbps,定位精度<2.5 m。支持增强型AT命令集,并使用AT命令进行控制。它具有GPS功能和工业级的标准接口,模块尺寸紧凑,体积小、重量轻、功耗低。
设计的智能车载终端硬件核心电路板如图2,图2中各种MEMS传感器模块通过I/O端口与微处理器进行通信。

图2 核心电路板
3 终端的软件设计
智能车载终端软件由下位机软件和上位机软件两部分组成。下位机软件负责系统初始化、传感器数据采集、车辆姿态角解算、数据的滤波和融合处理。上位机软件负责调用下位机数据、车辆状态预测、车辆状态显示、车载通信、车载导航、监测报警以及一些其它附加功能。智能车载终端软件的流程如图3。
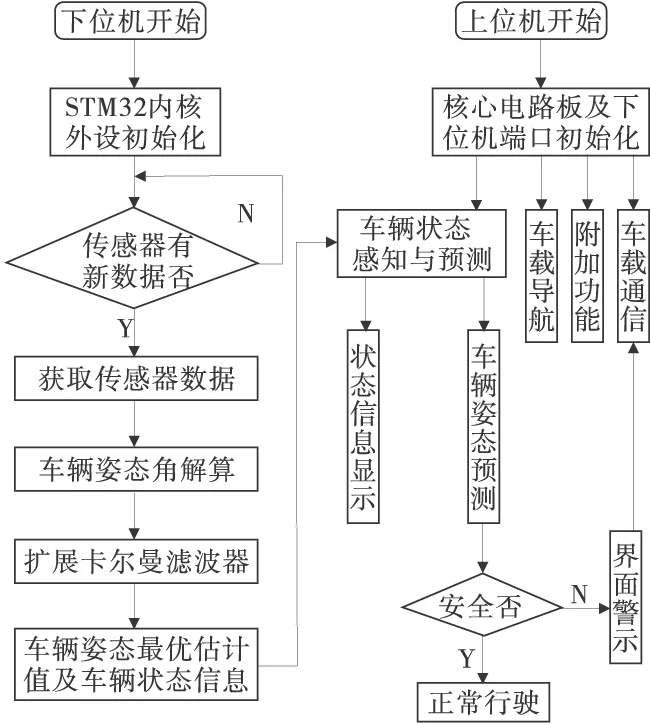
图3 平台软件流程
3.1 下位机软件设计
下位机软件的功能包括数据处理和过程控制。下位机软件采用模块化设计,即软件由若干子程序模块和一个主程序模块共同组成。子程序模块由系统初始化、传感器数据采集、传感器数据解算和数据上传等部分组成。主程序模块的流程如图4。
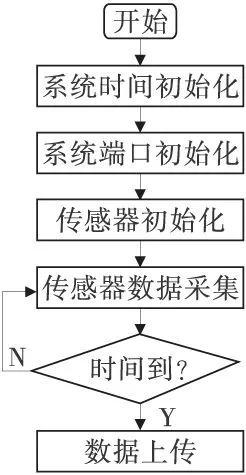
图4 下位机软件的主程序模块流程
在程序设计中,为了保证处理数据的完整性和防止子程序模块运行时间过长等问题,根据数据处理的复杂程度合理分配延迟时间。为了减小传感器采集数据时出现的误差,下位机软件采用扩展卡尔曼滤波器对实时获取的车辆运行状态和货物信息进行处理。
下位机软件初始化模块的部分程序如下:
Void vehicleSensors_init(void)
{
SystemInit();// 配置系统时钟
delay_init(72);//延时初始化
Initial_LED_GPIO();//初始化下位机LED灯
Initial_UART1(115200L); //初始化波特率
IIC_Init();//初始化I2C接口
delay_ms(300);//等待器件上电
MPU6050_initialize();//初始化运动处理组件
HMC5883L_ initialize ();//初始化磁力计
BMP085_init();//初始化气压高度计
……
}
为了得到传感器采集数据的最优估计值,将状态方程与观测方程进行离散化:
Xk=Φk,k-1Xk-1+Γk-1Wk-1
(1)
Zk=HkXk+Vk
(2)
式中:Φk,k-1为tk-1时刻到tk时刻的一步转移矩阵;Hk为系统测量矩阵;Γk-1为系统噪声驱动矩阵;Vk为系统测量的噪声序列;Wk-1为系统激励的噪声序列。
系统卡尔曼滤波方程如下:
1) 系统状态一步预测
(3)
2) 系统状态一步预测均方差
(4)
3) 滤波增益矩阵
(5)
4) 状态估计矩阵
(6)
5) 均方差估计矩阵
P=[I-KkHk]Pk,k-1
(7)
由式(3)~式(7)可得到系统的时间更新方程和测量更新方程,代入初始值即可获取最优估计值。
下位机对卡尔曼滤波处理后的十六进制数据采用十进制ASCII码进行传输,如0X123将传输十进制数据“123”,这些数据在下位机中按照高位和低位存储,负数则存储其补码数据格式。将传感器采集的数据加上数据标示头文件、数据长度和数据结束标示等构成一个数据帧,其数据处理的下位机程序如下:
UART2_Put_Char(0xa5);
UART2_Put_Char(0x5a);//数据帧开始标示
UART2_Put_Char(14+4);//发送的数据量
UART2_Put_Char(0xA1);
if(tempr<0)//温度信息
tempr=32768-tempr;//求补码
ctemp=tempr>>8;
UART2_Put_Char(ctemp);//发送高8位数据
temp+=ctemp;
ctemp=tempr;
UART2_Put_Char(ctemp);//发送低8位数据
temp+=ctemp;
…
UART2_Put_Char(temp%256);//冗余校验码
UART2_Put_Char(0xaa);//数据帧结束标志
3.2 上位机软件设计
上位机软件采用VB.NET程序语言进行开发。上位机通过RS-232串口与下位机进行数据传输。在进行数据传输前,上位机对RS-232串口进行初始化操作,包括设置串口的端口号、波特率、数据位、停止位和奇偶校验位。由于下位机传输数据的不连续性,上位机采用定时触发方式从缓冲区读取数据,并进行相应的解码操作得到传感器的实际数据。
为方便驾驶员实时了解车辆运行状态和货物信息,上位机软件在控制核心电路板和与下位机通信的同时,还要为用户提供良好的操作界面。上位机对数据帧进行解析和转换得到传感器的实时监测数据,其中传感器数据包括:车辆的横摆角、侧倾角、行驶速度、行驶加速度,危险品的温度,危险品容器的压力、液位、阀门开关等。当监测数据超出安全阈值时,上位机弹出警示信息界面,提醒驾驶员安全驾驶或者停车检查。对于无法靠近的危险品进行检测可以依靠摄像头来实现,为此在上位机中增加了视频检测功能。
在车辆运行过程中,可以通过GPRS拨号联网与具有固定IP和端口的监控中心进行信息交互,这样不仅方便监控中心实时远程监控危险品及运输车辆,追踪车辆行驶位置和进行必要的调度,以提高管理水平和运输效率,而且通信费用依据数据传输流量计算,实际应用成本低廉,便于推广。
当危险品在运输过程中发生突发情况时,上位机提供了两种应急方案与外界进行信息交互。第1种方案采用车载电话功能直接与外界进行信息交互。当遇到危险情况时,这种方案通过车载通话以免提的方式及时通知监控中心或向应急部门请求救援,具有实时性强,交互性好等优点。缺点是车载电话存在漫游费用,故远程运输成本较高。第2种方案采用短信息方式。这种方式可以在驾驶员惊恐的情况下,将车辆的详细位置信息、危险品和车辆的重要状态信息以文本形式传输给监控中心或应急部门,便于安排救援或事故处理。
为监控运输车辆行驶位置以及向驾驶员提供路况导航信息,设计了车载GPS导航和信息显示程序。车载导航采用嵌入第三方导航软件为驾驶员提供导航信息。信息显示用于电话报警时提供车辆位置的经纬度等信息。此外,上位机软件增加了一些其它附加功能,如联系人、便签、车辆电子名片、系统配置等功能。智能车载终端上位机软件的程序界面如图5。

图5 上位机程序主界面
4 实车试验和测试结果
为验证自主设计的智能车载终端的运行效果和稳定性,进行了危险品运输的实车试验。在试验过程中,智能车载终端软硬件运行状态良好。车载通信功能运行稳定,网络信号正常,无明显信号延时;车载电话功能运行良好,短信息能够正常收发,最多能发送70个字符;联系人查找功能能够提高检索效率;GPRS能够连接到具有固定IP地址的监控中心,相互通信顺畅。车载导航功能运行正常,能够调用嵌入的第三方导航软件。车载导航软件以周期为1 s实时更新车辆位置经纬度和行驶速度等信息,导航效果良好,车载导航软件运行界面如图6。

图6 车载导航效果
各种MEMS传感器模块以周期为0.2 s不断更新监测数据。当出现危险异常情况时,智能车载终端发出了警示信息,上位机软件弹出了警示信息界面,并正确地提供了异常信息,驾驶员快速地排除故障,确保了人-车-物的安全。驾驶员可以通过视频检测功能清晰地观测车辆内室及其周围的环境。
5 结 语
综合利用MEMS传感器技术、GPS卫星导航定位技术、GSM无线通信技术、GPRS网络技术和视频检测技术等,设计了一种用于危险品运输安全的智能车载终端,开发了相应的硬件平台和软件系统。为验证自主设计的智能车载终端的稳定性,进行了危险品运输的实车试验,智能车载终端能够实现对人-车-物的全面感知。试验结果表明,设计的智能车载终端可以提高危险品运输的安全和效率。所设计的智能车载终端功耗小、成本低、重量轻,对进一步探索智能车载终端的开发具有一定的参考价值。
[1] 边吉荣,宋丽亚,蔺金元.基于RFID的危险品运输安全管理系统设计[J].宁夏工程技术,2010,9(3):242-245. Bian Jirong,Song Liya,Lin Jinyuan.Design of transportation safety management system for dangerous goods based on RFID [J].Ningxia Engineering Technology,2010,9(3):242-245.
[2] 姚振强,王建,胡永祥,等.基于RFID/GPRS/GPS/GIS的危险品物流智能监管系统[J].公路交通科技,2013,30(2):147-152 ,158. Yao Zhenqiang,Wang Jian,Hu Yongxiang,et al.An intelligent supervision system for hazardous materials logistics based on RFID/GPRS/GPS/GIS [J].Journal of Highway and Transportation Research and Development,2013,30(2):147-152,158.
[3] 朱云,陈春贻,钟义龙,等.基于Webservice的危险品监管及应急救援协同平台研究[J].计算机应用与软件,2010,27(9):41-45. Zhu Yun,Chen Chunyi,Zhong Yilong,et al.On Webservice-based hazardous material monitoring and collaborative platform of emergency rescue [J].Computer Applications and Software,2010,27(9):41-45.
[4] 郭丰润,韩文涛,魏毓.危险品运输方式优化研究[J].中国安全生产科学技术,2013(2):126-129. Guo Fengrun,Han Wentao,Wei Yu.Research on optimization for transportation way of hazardous materials [J].Journal of Safety Science and Technology,2013(2):126-129.
[5] 王振中.公路危险品运输的实时监控与调度[J].物流技术与应用,2010(7):82-84. Wang Zhenzhong.The real-time monitoring and scheduling of road transportation of dangerous cargo [J].Logistics and Material Handling,2010(7):82-84.
[6] 沈立明,徐俊杰,卢健琦.宝钢危险品运输车辆监控系统的技术与实现[J].宝钢技术,2006(5):28-31,39. Shen Liming,Xu Junjie,Lu Jianqi.Technology and realization of monitoring system for vehicles with dangerous goods at Baosteel [J].Baosteel Technology,2006,(5):28-31,39.
[7] 曹更永,田玉玛.基于物联网技术的道路危险品运输安全应急管理系统设计[J].物流科技,2013(1):70-72. Cao Gengyong,Tian Yuma.Safety emergency management system design of road dangerous goods transport based on IOT [J].Logistics Management,2013(1):70-72.
[8] 刘军,石存杰,韦龙平,等.智能车载导航与电话系统设计[J].重庆交通大学学报:自然科学版,2013,32(1):139-142,151. Liu Jun,Shi Cunjie,Wei Longping,et al.Design of intelligent vehicle navigation and phone system [J].Journal of Chongqing Jiaotong University:Natural Science,2013,32(1):139-142,151.
Design of Intelligent Vehicle Terminal for the Safety of Dangerous Cargo Transportation
Pan Daoyuan, Song Xiaolei, Shi Cunjie
(School of Automobile & Traffic Engineering, Jiangsu University, Zhenjiang 212013, Jiangsu, China)
In order to reduce the road transportation accidents of dangerous cargo, to improve the transport efficiency and protect the security of driver-vehicle-cargo during transportation, an intelligent vehicle terminal was designed for the safety of the transport of dangerous cargo independently. The intelligent vehicle terminal was responsible for the real-time monitoring of driving state, the running state of vehicles and dangerous cargo. The terminal also has functions such as communication, navigation and networking. Hardware includes navigation module, MEMS sensor module, microprocessor module, power module and so on. Software system is composed of lower computer software and PC software, the functions of lower computer software are system initialization, data acquisition and processing; the PC software is responsible for calling data from lower machine to display vehicle status, and complete interactions with the driver. Finally, a road test was carried out based on the designed terminal platform. The results indicate that the intelligent vehicle terminal can run stately and have good performance.
vehicle engineering; road transportation; dangerous cargo; intelligent vehicle terminal; intelligent transportation
10.3969/j.issn.1674-0696.2015.04.33
2013-05-03;
2015-06-11
潘道远(1982—),男,湖南常德人,博士,主要从事汽车电子、振动分析与控制方面的研究。E-mail:plongroad@163.com。
宋晓磊(1986—),男,山东平度人,硕士,主要从事汽车振动与噪声控制方面的研究。E-mail:116665708@qq.com。
U463.3
A
1674-0696(2015)04-166-05
