基于图像处理的无参考物坑洞测量方法研究
2015-06-07曹建秋兰全祥王丹妹
曹建秋,兰全祥,王丹妹
(重庆交通大学 信息科学与工程学院,重庆 400074)
基于图像处理的无参考物坑洞测量方法研究
曹建秋,兰全祥,王丹妹
(重庆交通大学 信息科学与工程学院,重庆 400074)
对路面坑洞测量方法进行了研究,提出一种无参考物测量方法。利用安卓设备对坑洞进行图像采集并用其方向和重力感应参数对图像进行预处理和矫正,然后建立了坑洞测量的数学模型并给出计算公式,最后对测量方法进行了误差分析。实验结果表明,该方法测量准确,误差在可接受范围内。与传统测量方法相比,该方法有效地解决了依赖参考物测量的问题,对环境依赖性低,提高了信息采集的便捷性。
道路工程;图像处理;坑洞测量;参考物;便捷;安卓
0 引 言
测量方法是人们认识自然界的一种手段,按测量手段和获得测量结果的方法不同进行分类,主要有直接测量、间接测量和组合测量三种测量方法。随着时代的发展,测量方法在越来越多的领域被广泛地应用,然而传统的测量方法虽然测量工具简单、操作便捷、准确度高,但很容易形成人工测量误差,在某些环境下无法直接测量,测量结果精确度低等问题,因此为了提高工作效率,降低人工测量误差,测量方法逐渐转变为基于图像处理的测量方法,如利用数字图像处理技术测量几何尺寸[1]。
基于图像处理的测量方法是将图像处理技术与工程测量相结合从而识别出图像中物体的实际尺寸,其原理都是选定既定的参照物或者对测量系统进行标定之后再进行测量识别,前者主要适用于参照物和待测物体同时被采集至待识别图像的情况,而后者主要用于既定环境下,固定测量距离且测量系统不改变的情况,特别是小尺寸、高精度的测量。因此基于图像处理的测量方法被广泛应用于小型工业零件测量[2-3]、农产品测量[4]等其他工程领域,但参考物的选取和放置,测量过程的便捷性和灵活性等诸多问题依然亟需解决。
在利用图像处理技术进行测量的过程中,更希望能避免考虑参考物选取和放置的问题,能打破利用测量系统进行测量时存在的诸多限制,从而便捷、灵活、高效地进行测量。特别是在道路养护的路况信息采集过程中,工作人员希望利用图像处理技术将图像和路况信息同时采集并识别出路面情况(如基于图像处理的路面裂缝识别、基于图像处理的交通信息采集等[5-6]),但是却不愿过多地考虑参考标尺该如何放置,也不可能利用测量系统进行信息采集。所以如何在以往的基于图像处理测量方法的基础上,打破参考物的限制,提高测量灵活性与便捷性将会成为基于图像处理测量方法的一个研究重点。
1 测量方法与步骤
随着手机移动设备和移动应用的发展,Android发展前景广阔,并正逐步改变整个移动互联网,因此将移动应用与工程测量相结合将成为未来的一个发展趋势,笔者测量方法就是以安卓软硬件特性为基础。Android设备不仅包含摄像头采集设备,一般情况下还拥有一些其他的传感器,包括地磁和方向传感器、光和温度传感器等[7]。Android软件开发包(Software Development Kit,SDK)提供了各种应用程序编程接口(API)来访问手机上的底层硬件特性,并且可以通过SensorManager对象(android.hardware. SensorManager)来访问设备传感器,SensorManager对象监听来自传感器的数据,可以通过getSystemService()方法来获取其实例:
SensorManager sensors = (SensorManager)
getSystemService(Contexe.SENSOR_SERVICE)。
文中测量方法将利用采集到的多组坑洞图像对待测坑洞进行建模,再通过以上技术读取拍摄测量时的重力感应及方向感应设备参数,并对坑洞图像进行标定和测算,从而实现对路面坑洞的测量。该测量方法的具体实施步骤如图1。
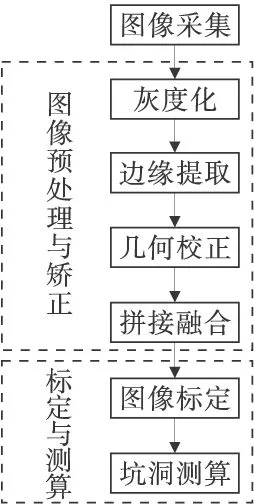
图1 基于图像处理的坑洞测量实施步骤
首先利用安卓设备对路面坑洞图像进行两次采集(分别对坑洞附近两点进行采集),采集过程中需要设定拍摄高度,保存安卓感应设备参数等数据。然后对采集到的图像进行预处理和矫正,预处理过程包括图像的灰度化、边缘提取、几何校正以及将两次采集的图像进行配准、拼接和融合。最后对融合之后的坑洞图像进行标定和测算,从而实现对路面坑洞的测量。
2 图像预处理与矫正
2.1 图像采集
2.1.1 拍摄高度设定
在拍摄测量之前应设置好手机摄像头距地面的高度h,并将其作为测算路面坑洞实际尺寸的基本参数。
2.1.2 拍摄步骤
利用Android设备对坑洞进行测量需要对坑洞信息进行拍摄采集,其具体实施步骤如下:
1)保持拍摄时手机摄像头距离地面的高度为h;
2)将摄像头拍摄中心对准坑洞任意一点A进行拍摄,保存当前图像为图像a,并读取方向感应设备参数αA以及当前重力感应设备倾角βA;
3)保持拍摄位置不变,对坑洞另外任意一点B进行拍摄,保存当前图像为图像b,并读取方向感应设备参数αB以及当前重力感应设备倾角βB。
2.2 图像预处理
2.2.1 灰度化
由于采集的图像在后续的处理过程中不需要对彩色图像的RGB,3个分量都进行处理,同时为了减小图像原始数据量,便于后续处理与计算,因此对所采集到的图像进行灰度化处理。
根据HSI模型,I分量表示的亮度足够包含了灰度图像的所有信息,因此利用I分量完全能够表示出一幅灰度图像,具体转换函数表达式如下:

(1)
式中:记号⎣x」表示不超过x的最大整数;i=0,1,…,M-1,j=0,1,…,N-1(M,N分别为该图像的宽和高)。
求出I值后,将输出图像的R,G,B分量值都赋值为I即可[8]。
2.2.2 边缘提取
为更好地测算出图像中坑洞的周向尺寸以及面积,减少后续计算量,降低测算复杂度,在图像预处理中,笔者将对图像中坑洞的边缘进行提取。
随着图像处理技术的不断发展,图像边缘提取的办法越来越多,其中典型的算法有Robert,Sobel,Prewit和Kirsh算法。但是就路面坑洞图像而言,坑洞图像的边缘检测较为复杂,利用这些边缘检测算法虽然计算量小,但噪声影响却很大,边缘检测效果不是非常令人满意,故笔者拟采用基于小波变换的自适应阀值对图像进行初步的边缘检测。小波变换在时域和频域都具有很好的局部性,并且小波基具有Fourier基的光滑性好和Haar基的局部性佳的优点[9]。
为让坑洞的边缘更明显,使边界向内部收缩,将孤立点或者小于结构元素的边缘去除,可以用过对坑洞的边缘图像进行腐蚀来实现。
若区域A被结构元素B腐蚀,可表示为:
E(A)=AӨB={a|Ba⊆A}={a|B+a⊆A}
(2)
结构元素的大小将影响坑洞边缘图像最后的腐蚀结果,结构元素较大时,一些较细的线条和小区域将被完全腐蚀掉,所以在使用形态学腐蚀对边缘进行处理时需根据具体情况确定结构元素的大小。
2.3 图像矫正
2.3.1 几何校正
利用安卓设备所采集的坑洞图像使用的图像系统是非矩形的像素坐标,当使用普通的显示设备对这些图像进行处理的时候将会出现很大的误差。因此,这些存在几何变形的图像都需要先进行几何校正,也就是说将其转换为矩形像素坐标,然后才能准备地对其内容做出解释,即使坑洞的位置准确地在边缘图像中展现出来[10]。
为使坑洞尺寸能够不失真地在图像上展现出来,保障后续测算的准确性,笔者将对坑洞图像进行几何校正,其具体步骤如图2。

图2 坑洞图像几何校正流程
坑洞图像进行矩形像素坐标变换之后的效果如图3。
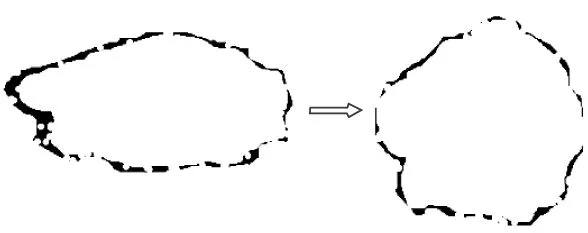
图3 坑洞边缘图像校正后效果
2.3.2 拼接融合
图像a,b分别是对坑洞附近的A,B两点进行采集所得到的坑洞图像。为了对坑洞进行测算,首先应将A,B两点融合在一张图像中(即将图像a,b进行配准[11-12]、拼接和融合)(图4),然后基于融合之后的图像c进行标定和测算。
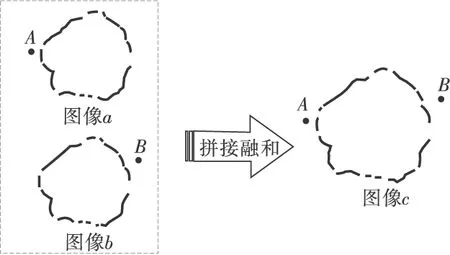
图4 坑洞图像拼接融合效果
3 测量原理与实现
3.1 模型建立
由于在测量过程中很难将测量限制于二维平面中,同时计算机视觉领域中,基于图像的三维测量方法是人们研究的热点,从二维测量到三维测量成为了必然趋势,因此笔者将对上述方法进行三维建模测量。
以拍摄所在位置为原点,即拍摄点P(0,0,h)在原点正上方且位于z轴上,以拍摄过程中正北方向为x轴,建立三维数学模型,并利用三维坐标将A,B两点表示在三维坐标系中,如图5。
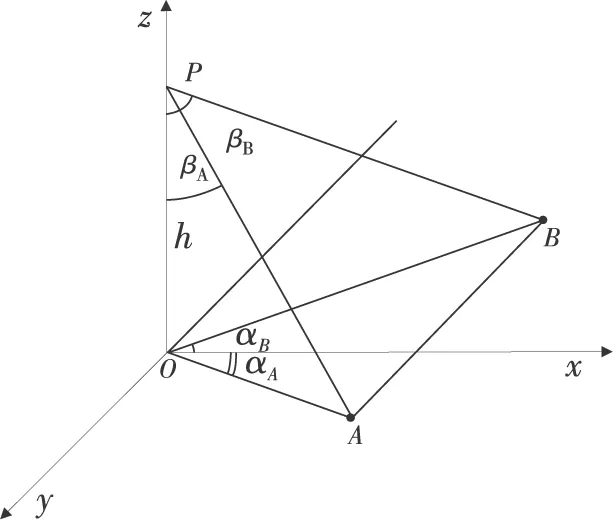
图5 三维测量模型

由空间向量夹角公式可得:
(3)
(4)
(5)
(6)

由空间两点距离公式:
(7)
解得:
dAB=
(8)
3.2 图像标定与测算
一般情况下,AB的实际尺寸并非路面坑洞的周向尺寸,因此只能用AB实际尺寸以及所占像素个数对坑洞图像进行标定[13],如图6。
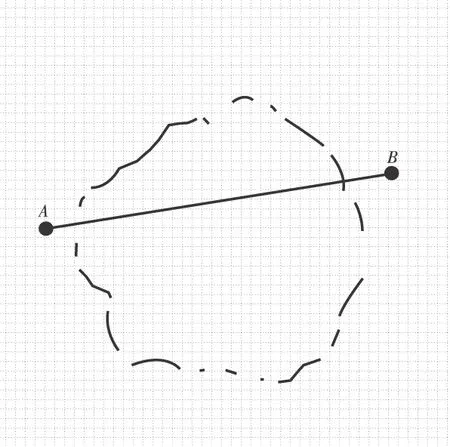
图6 对坑洞图像进行标定
由式(8)可计算出图像中AB长度dAB(单位:m)。若对坑洞图像中AB以及坑洞所占像素点个数进行分析统计,AB在图像中所占像素个数为n(以像素个数为单位),坑洞在图像中的所占像素个数为N,则图像中每个像素代表的实际长度为dAB/n,待测坑洞的面积S为:
(9)
4 实验结果与分析
4.1 误差来源与分析
根据式(9)可知,坑洞面积的测算结果由选定的A,B两点距离dAB,AB所占像素个数为n以及坑洞在图像中的所占像素个数为N决定,因此误差可能来源于计算式(8)中各个参数的测量误差以及对图像像素个数的统计误差。为进一步研究文中测量方法的准确性,笔者将不考虑对图像像素分析和统计的误差,只对式(8)中dAB各参数的测量误差进行分析,并将其测量结果将作为评价本办法可用性和准确性的标准。
由误差的定义,若x*为准确值x的一个近似值,则称x-x*为近似值x*的绝对误差,用e*(x)表示,即e*(x)=x-x*,故:

cos(αA+ΔαA+αB+ΔαB)]1/2
使用MATLAB作图,当βA,βB取值为[-π/2,π/2]时,绝对误差的三维图像如图7。
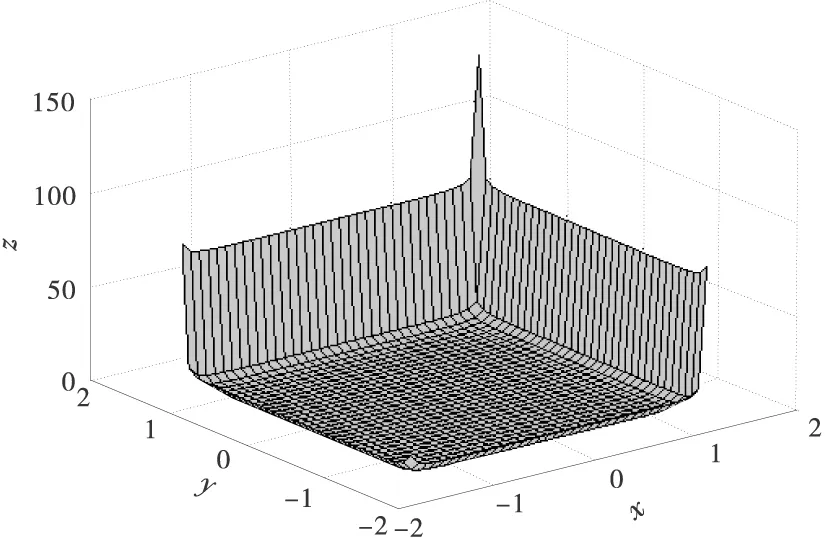
图7 三维坐标系中的绝对误差


图8 绝对误差大小分布
综上所述,排除对坑洞图像的分析统计误差,笔者测量方法的误差主要来源于测量过程中拍摄高度h,两次拍摄读取的重力感应倾角βA,βB和方向感应夹角αA,αB。若拍摄过程中,拍摄高度为1 m且重力感应倾角在45°左右时,绝对误差将小于0.05 m;重力感应倾角不超过75°时,绝对误差将小于0.1 m。因此笔者的测量方法应用在道路养护上是可行的,误差在可接受范围内。
4.2 实验结果与结论
笔者对不同尺寸的坑洞样本进行实际测量和识别,并将测算结果与直接测量结果相比较。实验数据如表1。
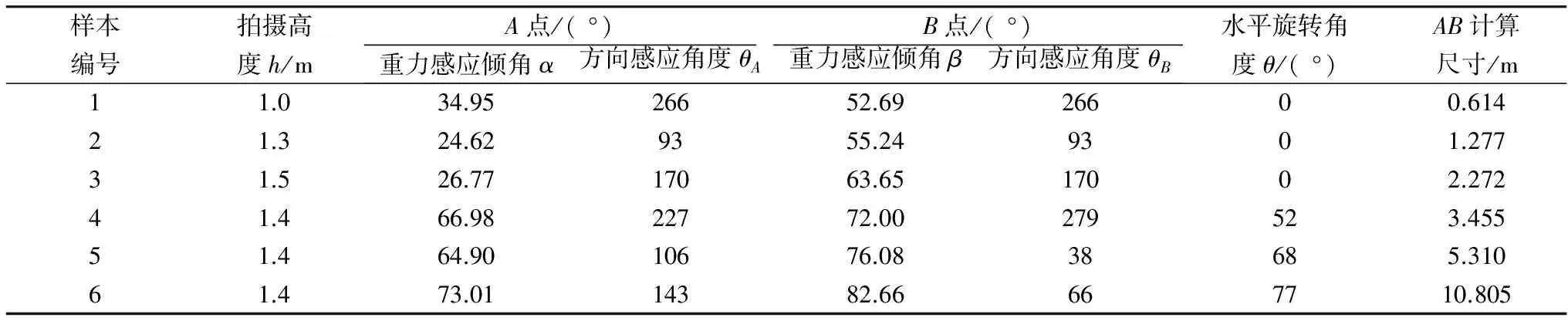
表1 不同样本测量参数及估算
表1是对部分坑洞样本进行测量,测量过程中采用不同的拍摄高度以排除拍摄高度参数设定的特殊性,方向感应角度规定正北方为0°。由于路面坑洞的实际尺寸的精确值很难得到,故笔者将采用直接测量所得结果与表1测量结果进行比较上述样本对比结果见表2。
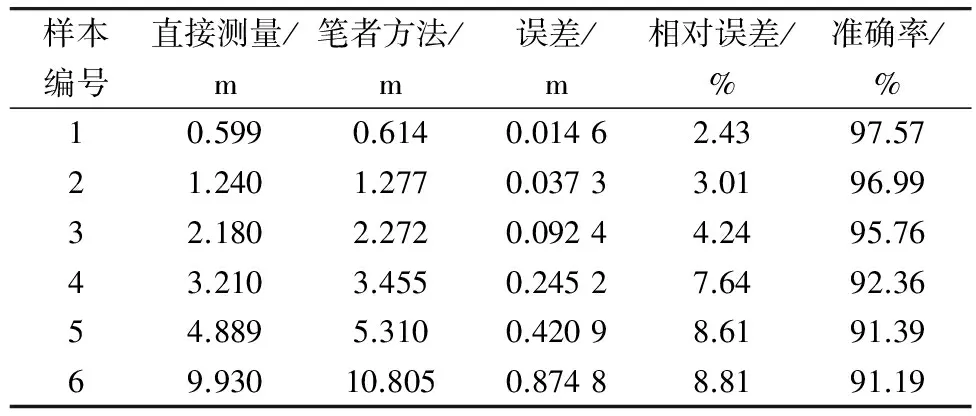
表2 与直接测量结果相比较
从表2的实验数据可见,利用文中测量方法与直接测量方法相比较,测量结果准确率高,达到了90%以上。从实验数据上来看,本文测量方法应用于道路养护,对路面坑洞测量是完全可行的,其测量误差在可接受范围内。
5 结 语
笔者所提出的基于图像处理的无参考物路面坑洞实际尺寸测量方法与既有的基于参考物的测量法方法、基于测量系统的测量方法相比,该方法在测量过程中不需要放置参考标尺或者参考物,对于测量环境依赖性低,很大程度上简化了工程测量复杂度,增加了道路养护的便捷性。该测量方法能够对道路坑洞的图像以及数据信息进行同时采集,适用于各种平坦道路路面坑洞尺寸的测量,但对斜坡道路上的坑洞测量误差较大。经实验验证,该测量方法测量准确度高,测量误差在可接受范围内。如何选取拍摄位置以及更加精确地确定拍摄高度是下一步研究重点。
[1] 张少军,艾矫健,李忠富,等.利用数字图像处理技术测量几何尺寸[J].北京科技大学学报,2002,24(3):284-287. Zhang Shaojun,Ai Jiaojian,Li Zhongfu,et al.Size measurement with digital image processing technology [J].Journal of University of Science and Technology Beijing,2002,24(3):284-287.
[2] 祁晓玲,赵霞霞,靳伍银.基于机器视觉的轴类零件几何尺寸测量[J].组合机床与自动化加工技术,2013(1):65-67. Qi Xiaoling,Zhao Xiaxia,Jin Wuyin.Geometric dimensions measurement for shaft based on machine vision [J].Modular Machine Tool & Automatic Manufacturing Technique,2013(1):65-67.
[3] 尚小燕,姜旭,武继安.基于图像处理的轴类零件尺寸测量技术研究[J].工具技术,2012,46(3):85-87. Shang Xiaoyan,Jiang Xu,Wu Ji’an.Research on size measurement of shaft parts based on image processing [J].Tool Engineering,2012,46(3):85-87.
[4] 纪平,王俊,陈鹤碧.基于图像的番茄识别与几何尺寸测量[J].安徽农业科学,2012,40(33):16426-16428. Ji Ping,Wang Jun,Chen Hebi.The tomato identification and geometric size measurement based on image [J].Anhui Agricultural Sciences,2012,40 (33):16426-16428.
[5] 孙波成,邱延峻.基于图像处理的路面裂缝识别研究[J].重庆交通大学学报:自然科学版,2008,27(1):61-64. Sun Bocheng,Qiu Yanjun.Pavement cracks identification using image Technology [J].Journal of Chongqing Jiaotong University:Natural Science,2008,27(1):61-64.
[6] 高建平,张小东,蒋锐.基于图像处理的交通信息采集[J].重庆交通学院学报,2006,25(1):103-106. Gao Jianping,Zhang Xiaodong,Jiang Rui.Traffic information collection method based on image manipulation [J].Journal of Chongqing Jiaotong University,2006,25(1):103-106.
[7] Lauren D,Shane C.Android Wireless Application Development Volume II:Advanced Topics [M].3rdEd.New Jersey,U.S.:Addison-Wesley Educational Publishers Inc.,2012.
[8] 孙燮华.数字图象处理——原理与算法[M].北京:北京大学出版社,2012. Sun Xiehua.Digital Image Processing:Principles and Algorithms [M].Beijing:Peking University Press,2012.
[9] 宋文龙,闵昆龙,邢奕,等.基于小波变换的自适应阀值植物根系图像边缘检测[J].北京科技大学学报,2012,34(8):966-970. Song Wenlong,Min Kunlong,Xing Yi,et al.Roots image edge detection based on adaptive thresholds and wavelet transforms[J].Journal of University of Science and Technology Beijing,2012,34(8):966-970.
[10] 李云海,屈海涛.数字图象处理[M].北京:机械工业出版社,2010. Li Yunhai,Qu Haitao.Digital Image Processing [M].Beijing:Mechanical Industry Press,2010.
[11] 王华,丛建亭,侯相深,等.畸变图像的有效配准算法[J].哈尔滨工业大学学报,2010,42(4):597-601.
Wang Hua,Cong Jianting,Hou Xiangshen,et al.Effective matching algorithm of distorted images [J].Journal of Harbin Institute of Technology,2010,42(4):597-601.
[12] 赵萌萌,曹建秋.基于边缘角点的SIFT图像配准算法[J].重庆交通大学学报:自然科学版,2013,32(4):721-724. Zhao Mengmeng,Cao Jianqiu.Image registration algorithm of SIFT based on edge and corner point [J].Journal of Chongqing Jiaotong University:Natural Science,2013,32(4):721-724.
[13] 吴新杰,王苗苗,黄国兴.基于粒子滤波和机器视觉的圆形零件尺寸测量[J].机械设计与制造,2012 (11):49-51. Wu Xinjie,Wang Miaomiao,Huang Guoxing.Measurement for sizes of circular parts based on particle filter and machine vision [J].Machinery Design & Manufacture,2012(11):49-51.
Potholes Measurement Method Based on Image Processing Without Reference Material
Cao Jianqiu, Lan Quanxiang, Wang Danmei
(College of Information Science & Engineering, Chongqing Jiaotong University, Chongqing 400074, China)
A potholes measurement method without reference materials was proposed by researching the existing measuring methods. Firstly, the pothole images were photographed by using the Android devices, and then the direction and gravity parameters of it were utilized to pre-process and correct pothole images. Secondly, mathematical models to measure potholes were established and the formulas were calculated. Finally, the errors of the proposed method were analyzed. Experimental results show that the presented method can achieve high accuracy of measurement and its error is acceptable. Compared with the traditional measurement methods, the problem for relying on reference materials is solved, and it has low dependence on the environment; the more important thing is that the convenience of information collection is improved obviously.
road engineering; image processing; potholes measurement; reference material; convenient; Android
10.3969/j.issn.1674-0696.2015.04.10
2014-06-13;
2014-07-16
重庆市科委攻关项目(CSTC 2011AC6102 ); 重庆高校创新团队建议计划项目(KJTD201306)
曹建秋(1967—),男,湖南益阳人,教授,主要从事数字图像处理、计算机控制、计算机网络方面的研究。E-mail:caojq86@cqjtu.edu.cn。
兰全祥(1990—),男,四川攀枝花人,硕士,主要从事图像处理方面的研究。E-mail:15123213773@qq.com。
TP391.41;U416.2
A
1674-0696(2015)04-057-05
