电液力伺服系统模型参考控制方法
2015-06-07马训鸣齐雪婷
王 韬,马训鸣,刘 霞,齐雪婷
(西安工程大学机电工程学院,陕西西安 710048)
电液力伺服系统模型参考控制方法
王 韬,马训鸣,刘 霞,齐雪婷
(西安工程大学机电工程学院,陕西西安 710048)
针对弹性负载情况下的电液力伺服系统非线性的问题,首先,以车用板簧力伺服系统为研究对象,对电液力伺服系统进行控制系统设计;其次,选择一阶参考模型跟随自适应控制算法作为控制策略对系统进行Simulink仿真分析;最后,对板簧进行力伺服控制实验.结果表明,电液力伺服系统力输出波形失真问题得到改善,取得良好的控制效果.该方法对模外动态和外加干扰都不敏感,可以抑制不确定性因素对系统的影响,具有较高的动态跟踪性能.
一阶参考模型;自适应控制;电液伺服系统
0 引 言
电液力伺服系统通常是不确定的非线性系统.在电液伺服系统中最常用的控制方法是PID或PI控制[12],这些方法对具有非线性和不确定性系统的控制非常有限.在受到负载变化大,液压系统漏损等因素影响时,系统的模型不仅复杂而且参数变化较大,传统控制算法难以取得满意的控制效果[3].为了解决控制对象参数在大范围变化时的控制问题,文献[4]提出了构造自适应控制器的设想.模型参考自适应控制系统[4]是目前应用广泛的一类自适应控制系统.在系统运行中,自适应控制器依靠不断采集的控制信息,确定被控对象当前工作状态,产生自适应规律,实时地调整控制器结构或参数,使系统始终工作在最优的运行状态,从而使整个控制系统获得满意的性能[5].
弹性负载情况下的电液力伺服系统也是不确定的非线性系统.对这类系统的控制问题,使用传统控制理论和方法难以实施.目前常用控制方法为模型参考自适应控制方法(MRAC),在应用MRAC方法时,推导自适应律中大多使用的是李亚普诺夫函数法,或者用Popov超稳定理论或鲁棒控制法、模糊集方法来设计自适应律.目前,在应用中大多是对一阶和二阶系统的自适应控制,当系统阶数较高时,自适应算法趋于复杂,对高阶系统常常采用先降阶再推导自适应律的方法.液压伺服系统一般都是三阶以上,所以大多数液压伺服系统自适应控制都是位置控制系统,如何设计较高阶的液压速度伺服系统和液压力伺服系统正是所关注的重点.本文选择一阶参考模型跟随自适应控制控制算法作为控制策略,改善了电液力伺服系统力输出波形失真问题,取得良好的控制效果.
1 控制系统设计
电液力伺服系统是由计算机控制的机—电—液一体化装置[6],系统原理图如图1所示.

图1 电液力伺服系统原理图Fig.1 Electro hydraulic servo system schematic diagram
本系统按功能分为液压系统、计算机控制系统、信号调理电路、电气控制系统4个部分.液压系统主要包括液压源、控制动力源、油箱及附件、过滤部件组和阀控液压缸;计算机控制系统由工控机和数据采集卡组成,通过A/D采集板采集被控对象的输出及其他外部信息,供控制器作出决策,按照一定的控制算法计算控制量,并将控制量送至D/A转换器,经伺服放大器转换为伺服阀电流;对整个系统进行监控,完成必要的保护功能[7];计算机控制系统软件由Labview软件进行控制,软件的功能模块由系统自检、增益调整、波形选择和运行分析[8]组成.控制系统框图如图2所示.
2 一阶参考模型跟随自适应控制算法
当采用一阶参考模型时,被控对象与参考模型的状态空间表达式[9]为
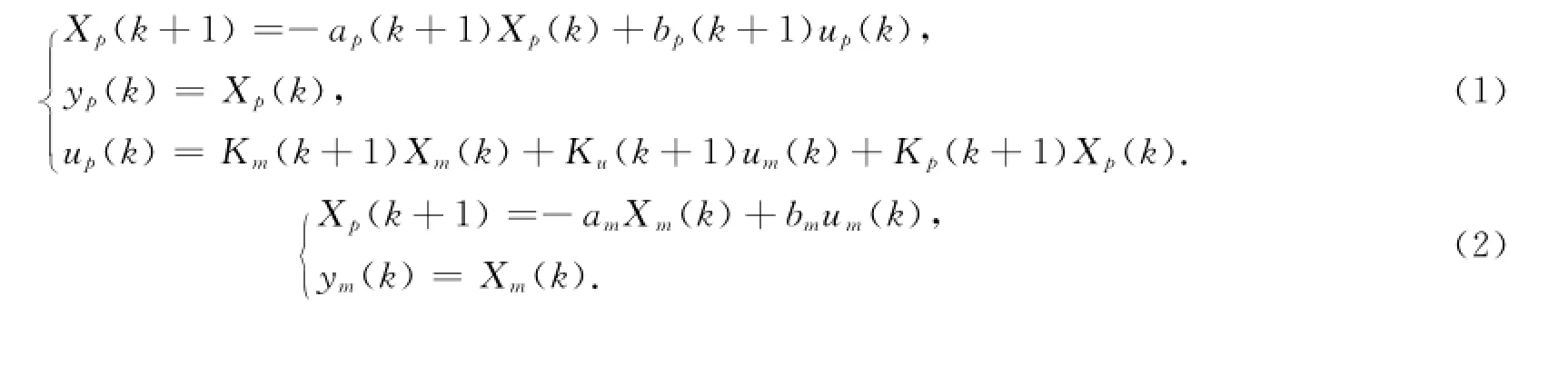
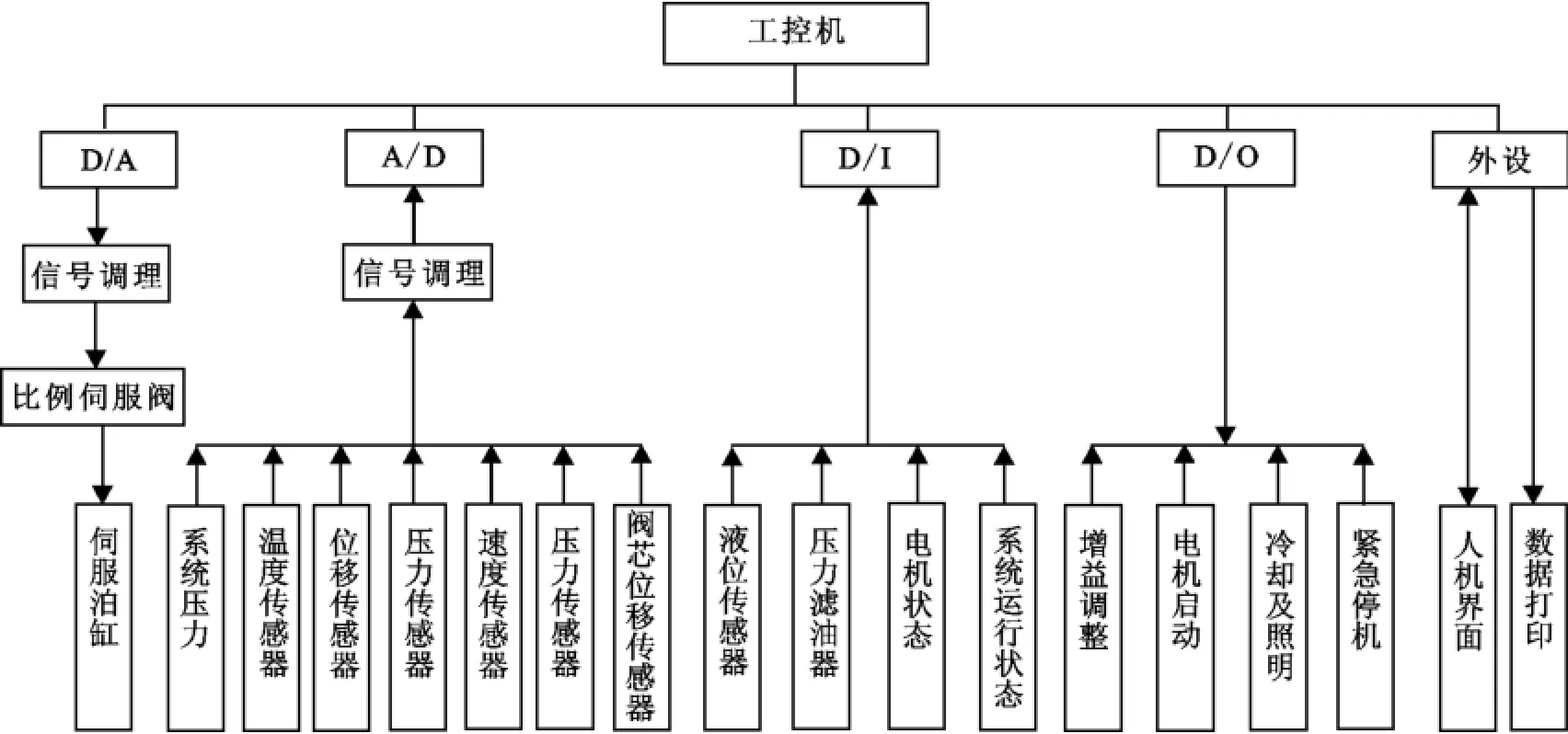
图2 计算机控制系统框图Fig.2 Computer control system block diagram
式中,Xp(k)为可调并联系统一维状态矢量,Xm(k)为参考模型一维状态矢量,ym(k)为参考模型输入,yp(k)为被控对象输出,up为被控对象输入,um为参考模型输出,ap,bp为系统参数,am,bm为常数,Ku为放大器放大系数,Km为调整信号,Kp为控制信号,一阶系统自适应算法结构框图如图3所示.
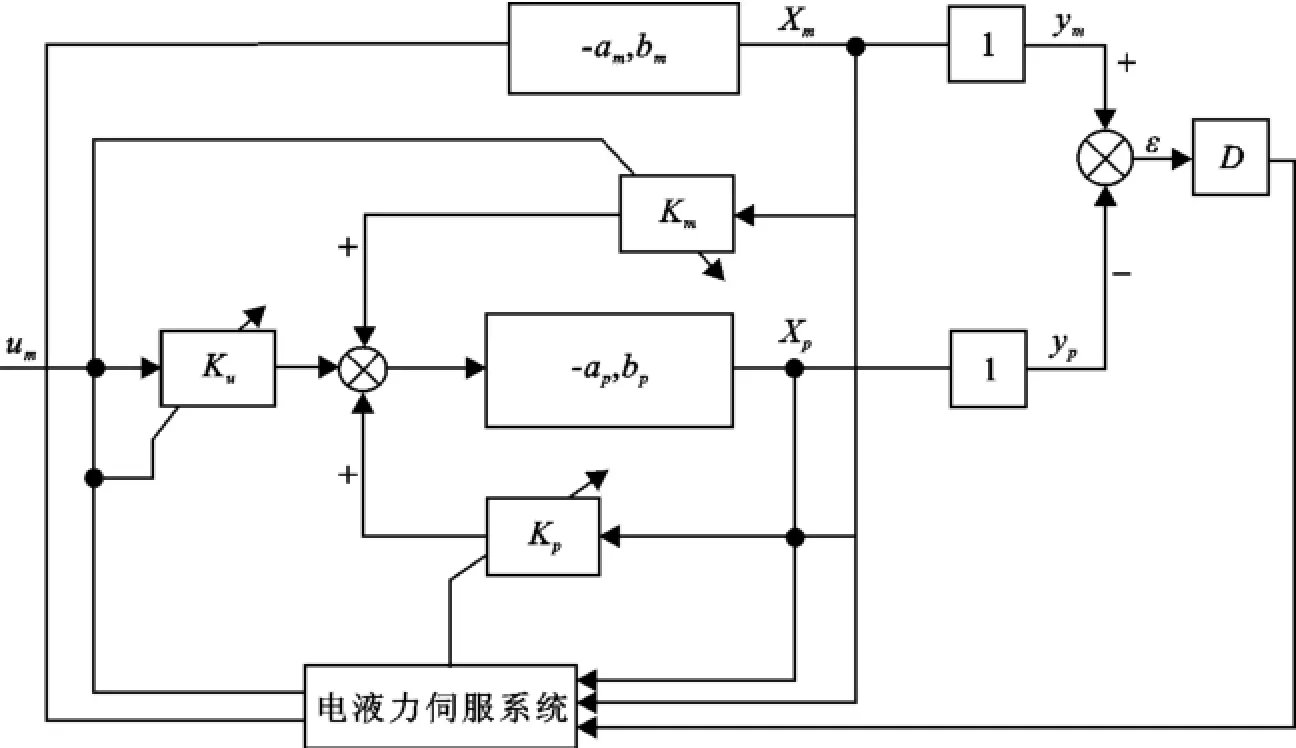
图3 一阶系统自适应算法结构图Fig.3 Adaptive algorithm structure diagram for first order system
定义输出误差为

设计参数为θ,|θ|<1,有

式中,W为严格正实,要求系统满足模型完全可跟随条件,即

除要求|θ|<1外,还要求

以Km=-(am+θ)K,则Ku=bmK,模型可跟随条件变形为

当bp≠0时,上式有解,模型完全可跟随条件自动满足,实际可调参数只有两个,因此对式(4)取z变换得

由于z/(z-θ)对应1/(s+α),为严正实函数,W(z)/ε(z)的严正实性取决于bp的符号,补偿器D应为

3 仿真与实验
电液力伺服系统传递函数是零型三阶系统,根据文献[10-11]提供的参数可计算得出电液力伺服系统的开环传递函数为

为了便于分析,设电液伺服系统的传递函数为

其一阶环节的转角频率为1rad/s,二阶环节固有频率约为15.3rad/s.取参考模型为

其转角频率为1rad/s,被控对象中固有频率15.3rad/s的二阶环节作为模外动态,采样周期为0.8s,输入方波信号周期为48s,幅值为1.在t=160s时,过程输出有一幅值为0.1的扰动.采用Simulink仿真[12],结果如图4所示.
仿真时Gp(s),Gm(s)均按带有零阶保持器的情况进行离散,过程和模型的离散传递函数为

另取参考模型为Gm(s)=2/(s+2),其转角频率为2rad/s,采样周期为0.75s,过程和参考模型的离散传递函数为

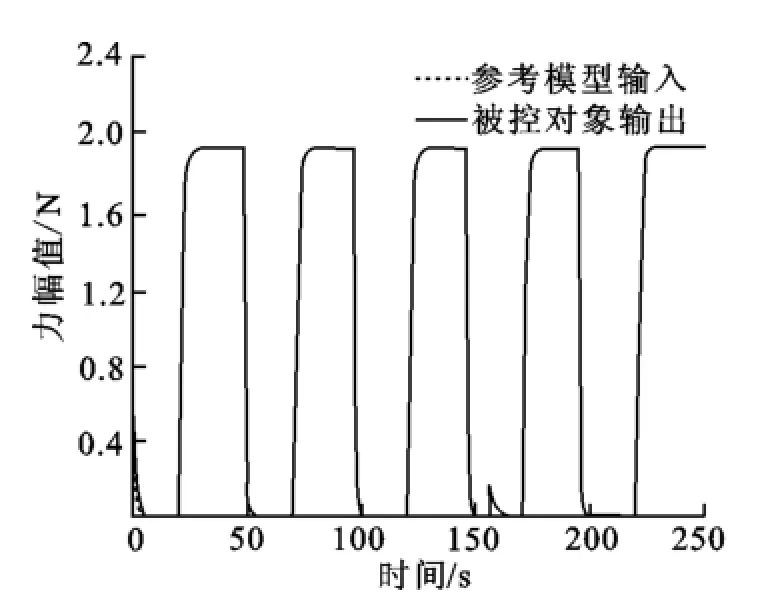
图4 方波信号输入仿真图Fig.4 Square wave signal input simulation
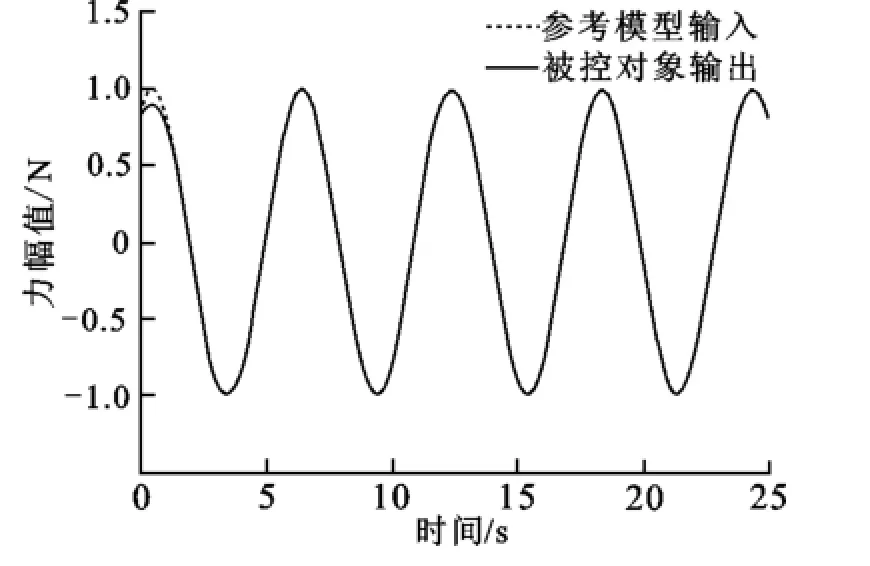
图5 正弦信号输入仿真图Fig.5 Simulation of sinusoidal signal input
以正弦信号sin0.2t作为参考输入,仿真结果如图5所示.从图4~图5可以看出,上述一阶系统算法对模外动态和外加干扰都不敏感,系统的曲线与模型所表示的线性系统曲线非常接近,具有良好的跟随精度.
弹性负载的一种典型代表就是车用钢板弹簧,车用钢板弹簧由多层钢板叠合,板簧的刚度是非线性变化的,所以弹性构件的实际弹簧刚度并非常数.
文中选择5Hz,10Hz和20Hz的频率进行了采用模型跟随自适应算法前后的力伺服控制实验.实验中,试件预紧力为1 200N,力幅值为600N.实验结果显示,采用自适应方法前波形失真度分别为40%,55.6%和76.3%,采用该方法后波形失真度分别为9.3%,14.8%和6.3%,电液力伺服系统力输出波形失真问题得到改善,取得良好的控制效果.
4 结束语
一
阶参考模型跟随自适应控制算法对模外动态和外加干扰都不敏感,可以抑制不确定性因素对系统的影响,保证受控系统响应特性与参考模型动态性能的一致性,对于改善电液力伺服系统力输出波形失真的问题,取得了良好的效果.
[1] 姜培刚,盖玉仙.机电一体化系统设计[M].北京:机械工业出版社.2011:169-181.
JIANG Peigang,GAI Yuxian.Mechatronics system design[M].Beijing:China Machine Press,2011:169-181.
[2] 徐健,周靖靖,张能伟.CMAC与PID复合控制算法在中央空调系统中的应用[J].西安工程大学学报,2012,26(6):761-765.
XU Jian,ZHOU Jingjing,ZHANG Nengwei.Application of CMAC and PID composite control algorithm in the central air conditioning system[J].Journal of Xi′an Polytechnic University,2012,26(6):761-765.
[3] 范子荣,滕青芳.液压伺服控制系统的设计[J].计算机仿真,2014(7):183-186.
FAN Zirong,TENG Qingfang.Design for hydraulic servo control systems[J].Computer Simulation,2014(7):183-186.
[4] 李言俊,张科,王红梅.自适应控制理论及应用[M].西安:西北工业大学出版社,2010:1-26.
LI Yanjun,ZHANG Ke,WANG Hongmei.Adaptive control theory and its application[M].Xi′an:Northwestern Polytechnical University Press,2010:1-26.
[5] 韩正之,陈彭年,陈树中.自适应控制[M].北京:清华大学出版社,2014:1-6.
HAN Zhengzhi,CHEN Pengnian,CHEN Shuzhong.Adaptive control[M].Beijing:Tsinghua University Press,2014:1-6.
[6] 马训鸣,霍建锋,李博.基于比例伺服技术的新型数字开口研究[J].西安工程大学学报.2014,28(2):225-230.
MA Xunming,HUO Jianfeng,LI Bo.Research on new digital opening based on proportional servo technology[J].Journal of Xi′an Polytechnic University,2014,28(2):225-230.
[7] 钱晓捷.16/32位微机原理、汇编语言及接口技术[M].北京:机械工业出版社,2011:54-76.
QIAN Xiaojie.16/32microcomputer principle,assembly language and interface technology[M].Beijing:China Machine Press,2011:54-76.
[8] 陈树学,刘萱.Labview宝典[M].北京:清华大学出版社,2011:1-44.
CHEN Shuxue,LIU Xuan.Labview collection[M].Beijing:Tsinghua University Press,2011:1-44.
[9] 周锐,陈宗基.自适应技术的理论及应用:控制、滤波、预报[M].北京:电子工业出版社,2014:120-154.
ZHOU Rui,CHEN Zongji.Theory and application of adaptive technology:Control,filtering and prediction[M].Beijing:Electronics Industry Press,2014:120-154.
[10] 易孟林,曹树平,刘银水.电液控制技术[M].武汉:华中科技大学出版社,2010:2-20.
YI Menglin,CAO Shuping,LIU Yinshui.Electro hydraulic control technology[M].Wuhan:Huazhong University of Science and Technology Press,2010:2-20.
[11] 周高峰,赵则祥.Matlab/Simulink机电动态系统仿真及工程应用[M].北京:北京航空航天大学出版社,2014:30-90.
ZHOU Gaofeng,ZHAO Zexiang.Matlab/Simulink electromechanical dynamic system simulation and Engineering[M].Beijing:Beihang University Press,2014:30-90.
[12] 王中鲜,赵魁,徐建东.Matlab建模与仿真应用教程[M].北京:机械工业出版社,2014:1-100.
WANG Zhongxian,ZHAO Kui,XU Jiandong.Matlab modeling and simulation application tutorial[M].Beijing:China Machine Press,2014:1-100.
编辑、校对:赵 放
Control method of electro-hydraulic force servo system model
WANG Tao,MA Xunming,LIU Xia,QI Xueting
(School of Mechanical and Electrical Engineering,Xi′an Polytechnic University,Xi′an 710048,China)
The electro hydraulic servo system with elastic load has a nonlinear problem.To solve the problem,firstly,laminated spring force servo control system was taken as the object of study,the control system of electro-hydraulic force servo control system was designed.Secondly,with first-order reference model algorithms taking as control strategy,Simulation analysis of the system was carried out.Finally,spring force servo control system was tested.This method is insensitive to the external dynamics and the external interference,the influence of the uncertainties on the system can be restrained,and it has high dynamic tracking performance.
first-order reference model;adaptive model following control;electro-hydraulic force servo control system
TP 273.2
A
1674-649X(2015)05-0589-05
10.13338/j.issn.1674-649x.2015.05.013
2015-06-11
马训鸣(1963—),男,陕西省渭南市人,西安工程大学教授,研究方向为机电控制.E-mail:1538719183@qq.com
