风力发电机叶片半主动多模态振动控制研究
2015-06-06蔡亮亮
蔡亮亮
(国电南京自动化股份有限公司,南京 210003)
风力发电机叶片半主动多模态振动控制研究
蔡亮亮
(国电南京自动化股份有限公司,南京 210003)
风力发电机叶片是一种柔性体结构,转动时由于大气环境复杂容易发生多模态振动,对风力发电机的平稳运行非常不利。传统半主动控制方法对结构单模态振动有很好的控制效果,但该方法用在多模态振动控制中会降低机电能的转换效率,控制效果不佳。提出了一种利用状态观测器来观测结构多模态振动下的主要振动模态,利用压电材料及外接电路对其主要振动模态进行半主动振动控制的方法,建立了风力发电机叶片的结构模型及其观测系统,试验验证结果表明,该方法效果良好。
风力发电机叶片;多模态;状态观测器;压电材料;半主动振动控制
0 引言
风力发电机(以下简称风机)叶片是一种复合材料制成的柔性薄板结构,复杂环境下很容易产生多模态振动,危害风机的平稳运行和使用寿命。结构的多模态振动即为结构在其多阶固有共振频率下振动的叠加[1-3],如何识别出其主要振动模态尤为重要,此类柔性板结构的主要振动一般为其一阶固有频率下的振动,即一阶频率下的振动幅度最大,是需要被控制的一个振动模态。本文针对风机叶片的结构特点,对应建立了叶片简化模型。由于压电材料良好的机电耦合特性使其广泛应用在结构的振动控制方面[4],因此,在其薄板模型上采用根部粘贴压电元件的方式来感应和控制其振动。感应压电元件用来传感模型的振动位移幅值,控制压电元件则用来控制模型的振动。本文使用状态观测系统来识别结构的主要振动模态,再利用半主动振动控制原理改变控制压电元件上的电压,控制压电元件产生与机构振动方向相反的形变,从而减弱结构的振动。
1 风机叶片结构模型及其观测系统的建立
1.1 风机叶片结构建模
选用1块根部粘贴有控制和传感压电片的柔性悬臂梁来对风机叶片进行建模[1],如图1所示。
利用有限元分析方法对该结构进行建模,方程如下[2-3]:

式中:ωi,ξi,qi,θi,Mi分别为梁的第i阶固有频率、模态阻尼比、模态位移矩阵、模态机电耦合矩阵、模态质量矩阵;V为传感压电片上的电压Vs。
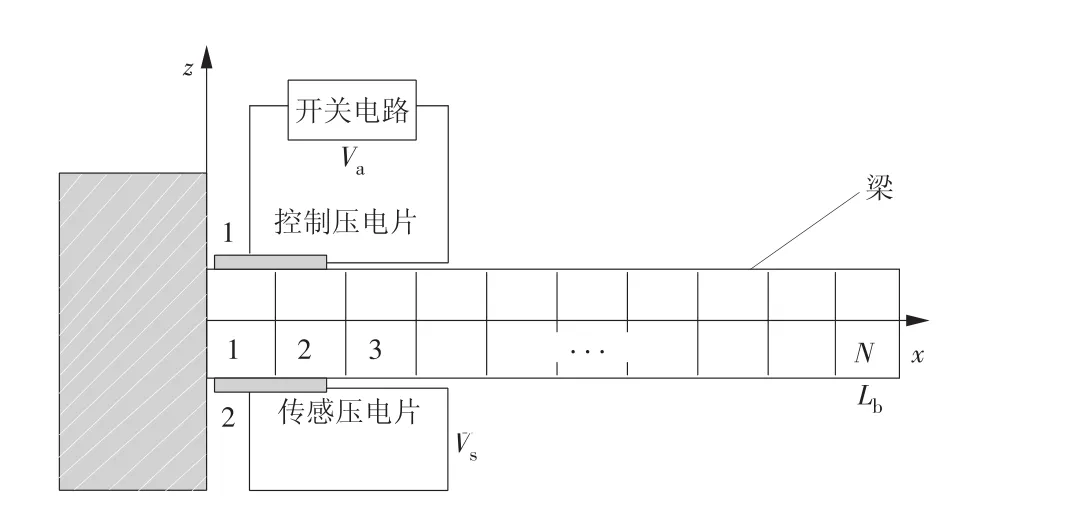
图1 风机叶片的等效悬臂梁结构模型
方程(1)可写成状态方程[5]:

式中:xi为i阶状态向量;u=Vs;yi为i阶输出向量;Ai,Bi,Gi均为状态矩阵,表达式为

Mi,θi的表达式为[2]
所需的特性参数见表1。
1.2 状态观测器的建立
根据已建立的悬臂梁振动模型,可对悬臂梁系统式(2)建立如下PI观测器[6]:

式中:^x∈Rn为状态估计向量;ω∈Rp为加权输出估计误差的积分;F∈Rn×p,L∈Rn×p,K∈Rp×m分别为观测器积分增益矩阵,比例增益矩阵和输出误差权矩阵。根据观测器原理[7],结合本文试验数据可求解得L,F,K对应的一阶观测矩阵

表1 悬臂梁的特性参数

将方程(3),(4)及表1中已知参数代入方程(5)可解出一阶输出向量,即为观测到的一阶振动位移。
2 半主动控制方法及控制系统
试验采用经典同步电压开关阻尼技术(Classical Synchronized Switch Damping on Voltage,SSDV)实现半主动振动控制[8-9],试验原理如图2所示。
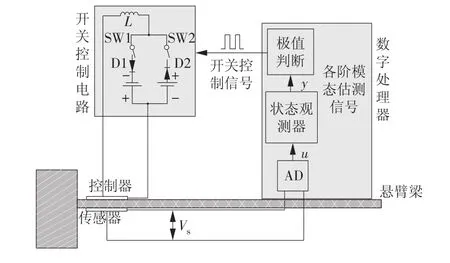
图2 试验装置示意
经典SSDV控制方法简述如下:当悬臂梁在垂直方向的位移达到峰值时,控制压电元件上的电压Va幅值达到最大值,此时对应地将开关D1或D2闭合,电路中的电感与压电等效电容组成的LC振荡器将发生谐振,半个谐振周期后压电片上的电压将发生翻转,此时开关立即断开。这种方法将使得压电片产生的力与梁的振动方向始终保持相反,从而达到抑制振动的效果。附加电源±Vcc使得压电片的翻转电压幅值增大,从而增加阻尼效果,得到一个更高的控制效率。
试验中,状态观测器的建立及模态位移峰值判断机制由数字处理器TMS320F2812编程实现,将传感压电元件上的Vs信号经AD转换后输入到观测器,观测器可输出各阶振动位移信号。试验中对结构的一阶振动位移信号进行峰值判断,在最大位移时刻输出开关信号控制对应的开关电路闭合或断开,从而实现对结构一阶振动模态的经典SSDV控制。
3 试验结果与讨论
悬臂梁的一阶和二阶振动模态频率分别约为20.02Hz和107.3Hz,为模拟现实环境中风机叶片的多模态振动情况,两种频率按1∶2的幅值比来激励悬臂梁振动。悬臂梁自由端位移波形和一阶位移观测波形如图3所示。将悬臂梁的实际振动位移和一阶观测位移进行快速傅里叶变换(FFT)分析比较,结果显示观测器对一阶振动位移的观测误差分别仅为2.75%,体现了本试验中状态观测器良好的观测效果。
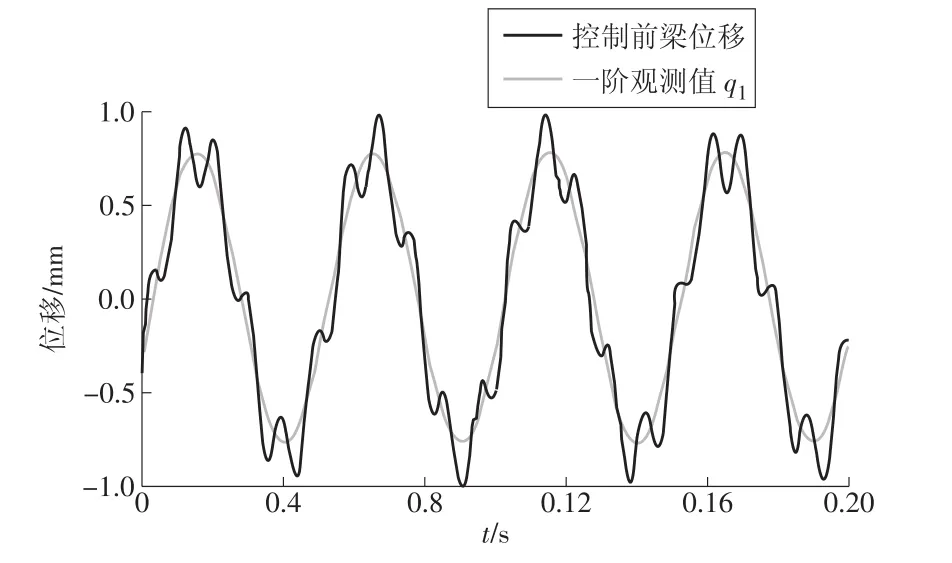
图3 振动控制前梁位移与其一阶观测值对比
图4中显示的是对悬臂梁一阶模态加载经典SSDV控制后悬臂梁自由端位移值、一阶模态观测值、和压电片电压值之间的时域关系。试验测得,悬臂梁控制后自由端位移振动幅值减少了89.34%。
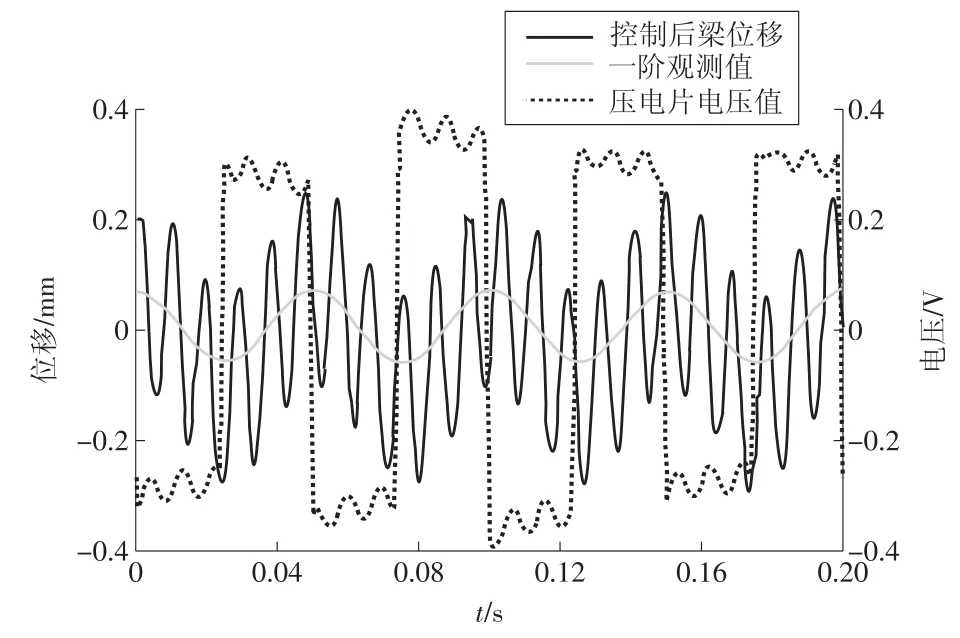
图4 振动控制后梁位移、一阶观测值、压电片电压值
4 结束语
本文阐述了风力发电机叶片建模及其状态观测器的建立方法,并实现了对模型在多模态激励环境下主要振动模态的观测。之前的研究由于不能直接利用传感器获得风机叶片的主要振动模态,所以给多模态控制带来了控制难题。本文中的状态观测器很好地解决了上述问题,在此基础上与经典SSDV方法结合对模型的主要振动模态进行了控制,且试验控制效果显著。
[1]李兴国,何玉林,金鑫.风力发电机组系统建模与仿真[J].重庆大学学报,2008,31(11):1226-1230.
[2]包能胜,曹人靖,叶枝全.风力机桨叶结构振动特性有限元分析[J].太阳能学报,2000,21(1):77-81.
[3]林海晨.风力机叶片的有限元建模[J].绵阳师范学院学报,2007,26(8):43-47.
[4]唐纪晔,黄海,夏人伟.压电复合材料层合板自适应结构的振动控制[J].计算力学学报,2000,17(4):441-446.
[5]胡寿松,王执铨,胡维礼.最优控制理论与系统[M].北京:科学出版社,2005.
[6]段广仁.线性系统理论[M].哈尔滨:哈尔滨工业大学出版社,2004.
[7]顾仲权,马扣根,陈卫东.振动主动控制[M].2版.北京:国防工业出版社,1997.
[8]DOMINIK NIEDERBERGERD,MORARIM.An autonomous shunt circuit for vibration damping[J].Smart Materials and Structures,2006(15):359-364.
[9]GUYOMAR D,RICHARD D,PETIT L.Vibration damping using a semi-passive piezoelectric technique[C]∥18th International Congress on Acoustics.Kyoto:ICA,2004.
(本文责编:白银雷)
TM 614
A
1674-1951(2015)08-0072-02
蔡亮亮(1986—),男,江苏南通人,工程师,工学硕士,从事电力设备智能化方向的研究工作(E-mail:cai2013@163.com)。
2015-04-14;
2015-06-27
