多雷达组网系统空间配准方法研究
2015-06-05程志刚
程志刚
(中国人民解放军91202部队,辽宁 葫芦岛 125004)
多雷达组网系统空间配准方法研究
程志刚
(中国人民解放军91202部队,辽宁 葫芦岛 125004)
针对雷达测量系统误差在其分布区域内不相等,网内雷达多而导致集中计算负荷过大等工程问题,本文在分析小区域采样可观测度的基础上给出了区域样本优化的方法,并讨论大型组网系统空间配准的采样管理和系统误差近似补偿问题。最后,应用结果证明该方法有效。
空间配准;可观测度;样本优化;误差补偿
0 引 言
由于雷达组网系统在跟踪精度、范围、可靠性及目标发现概率等方面均明显优于单雷达系统,因此雷达组网系统在空中交通管制、空中防御等领域得到广泛的应用[1]。然而,由于一系列原因,例如正北校准偏差、零距离定时偏差、天线基座失衡、工作零点漂移等[1],雷达测量会存在一定的固定偏差,并且该误差会缓慢变化,导致测量误差超出理论值。当相对偏差过大时,会导致同一目标的不同雷达观测输出航迹相关失败,从而出现同一目标产生多条航迹的现象,即航迹分裂。此时,雷达组网系统的跟踪效果反而不如单雷达系统。为了解决该问题,一些配准算法被相继提出,包括实时质量控制法(Real Time Quality Control, RTQC)、最小二乘法(Least Square, LS)、精确最大似然法(Exact Maximum Likelihood, ML)、广义最小二乘法(General Least Square, GLS)等[2]。
对于测量误差在其探测区域中均匀分布的雷达,只需采用局部采样数据即可实现其系统误差参数估计,然而在实际应用中曾发现,同一雷达依据其两个不同区域内采样估计出的方位角偏差方向相反。因此,若采用某局部区域采样获得的误差参数对整个区域的目标探测进行补偿,某些非采样局部区域内的目标会产生更加严重的航迹分裂现象,导致态势混乱。
显而易见,要解决该问题,就需要分区域进行估计和补偿。本文首先讨论区域采样的可观测程度,并在此基础上提出样本优化方法;然后结合工程实际,给出采样管理和近似补偿的实现途径。工程应用结果证明,该方法不仅保证了补偿后各局部航迹的一致性,而且降低了配准算法对计算资源的要求。
1 问题描述
在多雷达组网系统中,误差的来源和种类众多,既有传感器本身的安装偏差、精度误差等系统误差,又有受随机干扰产生的测量误差。但归结起来,误差主要表现:
斜距误差:
δr=δrb+r*δrg+Vr(t);
方位角误差:
δθ=δθb+Vθ(t);
俯仰角误差:
δφ=δφb+Vφ(t)。
式中:δr为斜距偏差;δrb为斜距系统误差;δrg为斜距误差增益;r为斜距真值;δθ为方位角偏差;δθb为方位角系统误差;δφ为俯仰角偏差;δφb为俯仰角系统误差;Vr(t),Vθ(t)和Vφ(t)为高斯白噪声。这里使用ve为系统误差向量:
ve=(δrb,δrg,δθb,δφb)T。
无论在理论研究还是在工程应用上,一般假设雷达测量系统误差在其分布区域内是相等的。但有时实际情况并不满足该假设。为解决这一问题,需要重新建立假设如下:
雷达测量系统误差在其分布区域是以位置为自变量,缓慢变化的连续函数,即对任意位置 (L0,B0)和任意方向矢量d,ve满足下式:
式中:L为测地坐标系中的经度;B为测地坐标系中的纬度(忽略高度);M为一个较小的常数。这样,在较小区域内,可忽略系统误差的变化。
2 可观测度与样本优化
采样分布影响系统可观测度,进而影响系统误差估计的准确性。特别是在采样相对密集的情况下,样本容量的扩大并不一定使系统的可观测度增强,有时反而变差[4-5]。因此,有必要对样本数据的可观测度进行分析,从而优化观测集。下面讨论基于地心地固(EarthCenteredEarthFixed,ECEF)坐标系下样本的可观测程度及优化方法。
设雷达r1,r2共同观测同一目标T,k时刻第j部雷达rj对T的观测经误差补偿后的ECEF坐标为Pj(k),那么对于r1,r2有下式:
P1(k)=P2(k),
(1)
令bj为雷达rj的ECEF坐标,Rj为rj直角坐标到ECEF的变换矩阵,则有:
式中:Lj,Bj,Hj分别为雷达rj天线的经度、纬度和高度。Cj表达式为:
式中:Eq为赤道半径;e2为地球偏心率。式(1)可重写为:
b1+R1Xl1(k)=b2+R2Xl2(k)。
(2)
式中Xlj(k)为k时刻T在rj的局部直角坐标系下经误差补偿后的坐标:

式中rj(k),θj(k),φj(k)分别为k时刻雷达rj对T斜距、方位角和俯仰角的测量值。
b1+R1J1(k)*ve1≈b2+R2J2(k)*ve2,
将上式整理为:
Ax=b。
(3)
不难发现,式(3)很容易推广到n个雷达的情况。这里为简化描述,只考虑两雷达覆盖同一目标的情况。假设样本容量为m,有:
则系统误差的观测度表示为[3]:
其中cond2(A),λ(A)分别为矩阵A的条件数和特征值。
在Deg较小的情况下,A中存在的噪声Vr(t),Vθ(t)和Vφ(t)会严重影响ve值的估计性能,因此需要优化样本。在已知样本空间中使用贪心方法得到次优样本子集的步骤如下:
步骤1根据m次观测得到样本S,样本容量为m,置样本计数器i=1;
步骤2删除矩阵A中的子块vi得A′,这里vi=(R1J1(ki)-R2J2(ki));
步骤3计算A和A′的可观测度Deg和Deg′;
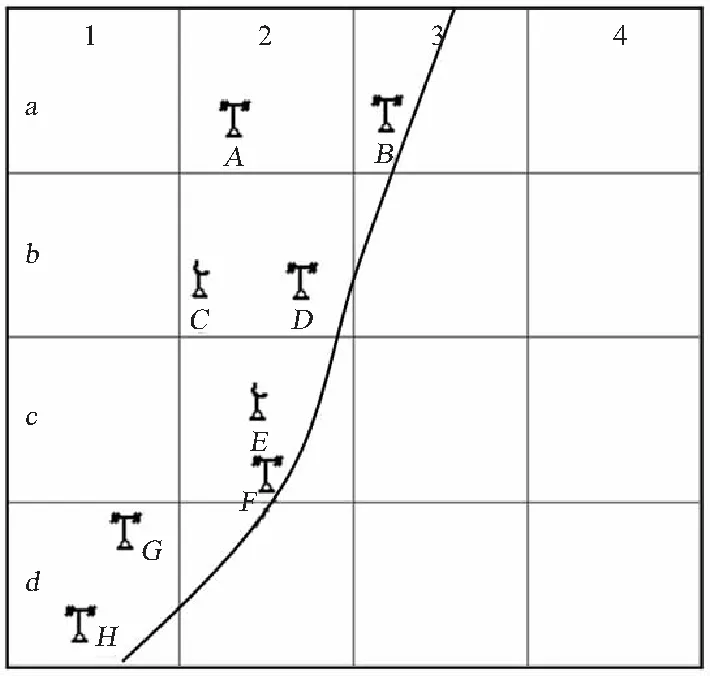
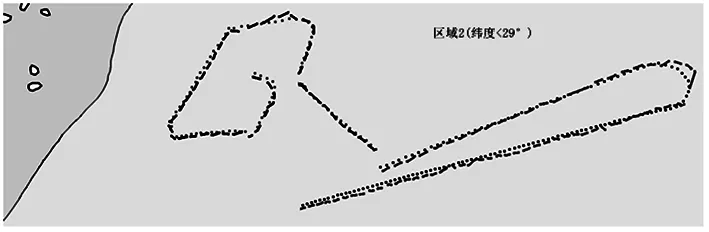
步骤4若Deg 步骤5若i=m,则停止,此时A即为所求;否则i=i+1,返回步骤2。 一般来讲,组网系统拥有众多传感器,可以实现大范围的目标监视。由于所获目标信息量非常庞大,使得集中估计网内所有雷达系统误差的计算量急剧增加。即使计算资源满足要求,也不能避免由于存在部分较差质量的数据而导致整个配准性能降低[4]。因此,如何管理样本数据和平衡计算负荷成为关系到空间配准效果好坏的重要环节之一。 工程实际中一般将系统接收的观测数据分为3类:第1类是协作目标回传的高精度定位数据(如GPS数据、其它导航定位数据),可视为其系统误差为零的雷达观测;第2类是标准雷达输出的观测(标准雷达在其监视方向具有较高的可信度和数据质量,一般选用担负目标精确定位任务的雷达,例如引导雷达);第3类是其他雷达输出的观测。这样,建立网内雷达测量系统误差样本结构如图1所示。 图1 多雷达组网系统误差样本采集结构示意图Fig.1 Error sampling structure diagram of multiple radar networking system 图1中的绝对配准指仅有第2类多个标准雷达或仅有第3类多部雷达对同一目标覆盖观测时的配准问题,此时需配准的多雷达性能相近;相对配准是指选择某一传感器为基准传感器,估计出其它传感器相对于基准传感器的系统偏差,然后对其进行补偿(见图1),其他雷达以标准雷达为基准进行误差估计与补偿,标准雷达以高精度定位数据为基准进行误差估计和补偿。在式(3)中,若选中雷达2作为基准雷达,那么该式可简化成: (4) 根据图1中的新假设可知,系统误差分布是一个随位置缓慢变化的曲面。近似补偿的基本思想为,将采样空间分割成为若干小区域,然后分别进行采样估计,最后利用散点逼近误差分布曲面。一个简单的近似方法如图2所示,使用网格i内的采样计算出该网格的误差补偿值ai,然后利用4个相邻的ai确定1个bi,这样由任1个bi和其相邻的2个ai就可确定以它们为顶点的三角形内任一点误差值。该方法以多个顶点连接的三角形逼近误差曲面,从而使误差补偿值连续,避免由于缺少采样或估计不准,使得跨区校正航迹出现跳跃。 图2 误差补偿值近似示意图Fig.2 Error compensation approximation schemes 图3 某系统对空雷达部署示意图Fig.3 An radar deployment diagram 某对空雷达组网系统中的雷达部署如图3所示。其中,C,E是引导雷达,A,B,D,F,G,H是警戒雷达。根据使用要求,除在c1,c2,d1,d2区域内以E为标准雷达,其他网格均以C作为标准雷达,采样后使用第3节中的步骤进行样本优化。 进行空间配准时,首先使用b3,b4,c3,c4区的样本计算C,E的绝对配准误差,然后利用C,E补偿后的观测使用相对配准按方格计算其他雷达的系统误差。 使用相对配准法计算图3中雷达B的误差时(C为标准雷达),发现a,b区样本和c,d区样本所获得的雷达B误差估计结果不一致,具体数值见表1。使用分区域1中样本雷达B的系统误差估计值(δθ=1.19°,δδr=-86.92m)进行全区域航迹补偿的结果如图4所示。其中,在纬度高于29°的分区域1中,补偿前航迹平均偏差为4 203.63m,补偿后航迹剩余偏差为1 461.97m,具有一定补偿效果;在纬度低于29°的分区域2中,补偿前航迹平均偏差为2 100.00m,补偿后航迹剩余偏差却增大至4 123.22m,全然没有达到误差补偿目的,反而加剧了航迹分裂。使用分区域2中的采样重新估计和补偿后,剩余偏差下降至1 888.79m,达到了一定的补偿效果,如图5所示。 表1 雷达C观测为标准的雷达B系统误差估值Tab.1 Error estimate of radar B on the basis of radar C 图4 基于分区域1观测样本对雷达B的全区域空间配准效果Fig.4 The whole area space registration effect of radar B based on observation samples in the area of No.1 图5 基于分区域2观测样本对雷达B的分区域2空间配准效果Fig.5 The No.2 area space registration effect of radar B based on observation samples in the area of No.2 本文根据系统可观测度,给出了区域样本优化的步骤,然后结合工程实际,讨论了采样管理和近似补偿的实现方法。该方法具有较高的工程价值,已在工程中得到应用。 [1] 李鸿艳,冯新喜.多雷达系统几种误差配准方法的比较与分析[J].电子对抗技术,2001,16(1):37-42. [2] 韩崇昭,朱红艳,段战胜,等.多源信息融合[M].北京:清华大学出版社,2006:171-188. [3] 杨宏文,郁文贤,胡卫东,等.基于可测度分析的雷达系统误差估计[J].国防科技大学学报,1999,121(5):53-56. [4] 杨宏文,郁文贤,胡卫东,等.基于数据补偿的雷达系统误差估计[J].火力控制与指挥,2000,25(2):23-27. Research on radar space registration method for multi-radar network system CHENG Zhi-gang (No.91202 Unit of PLA,Huludao 125004,China) The radar measurement system errors are not equal in their distribution areas and heavy centralized computing load is leaded in multi-radar network.For these engineering problems, an area sample optimization method is given on the basis of analyzing small area sampling observability in this paper.The problems of space registration sampling management and system error compensation are also discussed for large multi-radar network.At last, the result of an engineering application proved the effectivity of this method. space registration;observability;sample optimization;error compensation 2015-09-01; 2015-09-07 程志刚(1965-),男,高级工程师,研究方向为雷达技术、舰船装备技术保障。 TN959 A 1672-7649(2015)12-0131-04 10.3404/j.issn.1672-7649.2015.12.0273 采样管理与近似补偿



4 应用案例


5 结 语