永磁真空断路器的同步关合技术研究与仿真
2015-06-01陈亚彬顾伟康柳庆东
陈亚彬,顾伟康,柳庆东
(东南大学电气工程学院,江苏 南京 210000)
永磁真空断路器的同步关合技术研究与仿真
陈亚彬,顾伟康,柳庆东
(东南大学电气工程学院,江苏 南京 210000)
从同步关合技术的意义和原理入手,从理论上分析了关合电容器的相位选择策略,并通过Matlab仿真加以证实。然后分析了永磁机构同步关合的影响因素,包括真空断路器的预击穿特性、控制电压对合闸时间的影响、环境温度对合闸时间的影响以及老化与磨损对合闸时间的影响,通过对这些影响因素的分析,研究了同步分合闸控制的关键技术,并利用FIR滤波的方法提取参考信号的过零点,应用BP神经网络和自适应算法预测永磁机构真空断路器分合闸时间。
永磁机构;同步关合技术;神经网络
1 引言
电网电压的初相角在电力系统中的断路器开断和关合的瞬间完全是一个随机数,因此会产生一个较大的过电压和涌流。当用于投切容性负载(如电容器组、空载输电线路等)或感性负载(如空载变压器、电抗器组、大容量电动机等)时,其产生的涌流和过电压不仅会对系统产生各种干扰,对电网中的电力设备不利,还可能引起继电保护误动作,对电力系统的稳定性造成威胁。同步关合技术是一种有效解决以上问题的智能控制技术,它是指利用智能控制系统,使断路器在电网电压指定相角处关合,从而使得电力系统中的容性负载和感性负载在对系统冲击最小的时刻投入或切断。同步关合技术可以降低合闸操作暂态过程中的过电压和过电流,从而可以提高电力系统设备的寿命和系统的稳定性[1]。总结下来采用同步关合技术有如下意义:(1)减小合闸操作的涌流和过电压;(2)提高电能质量和系统的稳定性;(3)延长了电器的使用寿命和检修周期,降低了成本;(4)采用同步技术可以使系统的瞬态过程缩短;(5)断路器的同步分断可以大大提高其分断能力。然而传统的操动机构如电磁机构和弹簧机构等是由复杂的机械传动系统组成的,具有动作时间较长、制造工艺复杂、动作时间分散性大的缺点,因而难以实现操动机构的准确控制。而同步技术的关键正是要操动精确,达到毫秒级,传统的操动机构很难胜任。永磁机构结构简单,具有较高的机械可靠性,动作时运动部件少且连接紧密,使得配永磁机构的真空断路器的分合闸时间比较短而且稳定,分合闸时间的分散性可以控制在±1 ms内,在动作时间的精确度方面能满足同步关合的要求,永磁机构的出现为开关的同步关合技术的实现提供了很好的物质基础[2]。
2 同步关合的原理与分析
2.1 电容器的同步关合分析
电容器常用于高低压电力系统并联补偿无功功率,可减少线路能量损耗,减少线路电压降,改善电压质量,提高系统供电能力,因此其对电容器的投切就比较频繁。当电容器从电力系统中投切时,会产生一个较大的涌流,其后果可能会损坏断路器的触头,破坏电力设备的绝缘等。图1为关合电容器的原理图。其中U为10kV电压源;QF为断路器;R为0.2Ω的线路电阻;L为1.5mH的线路电感;C为355μF的负载电容器。
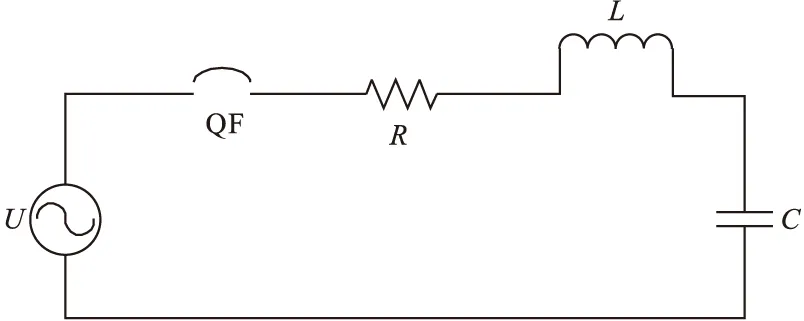
图1 关合电容器原理图
其回路方程如式(1)所示:

(1)
对上式方程两边同时微分得:
(2)
对上式求解,得:
(3)

C1=Bsinφ
通过Matlab仿真计算得到不同合闸初相角下电容器涌流的波形。图2分别是α为0°、45°、90°时的涌流波形。
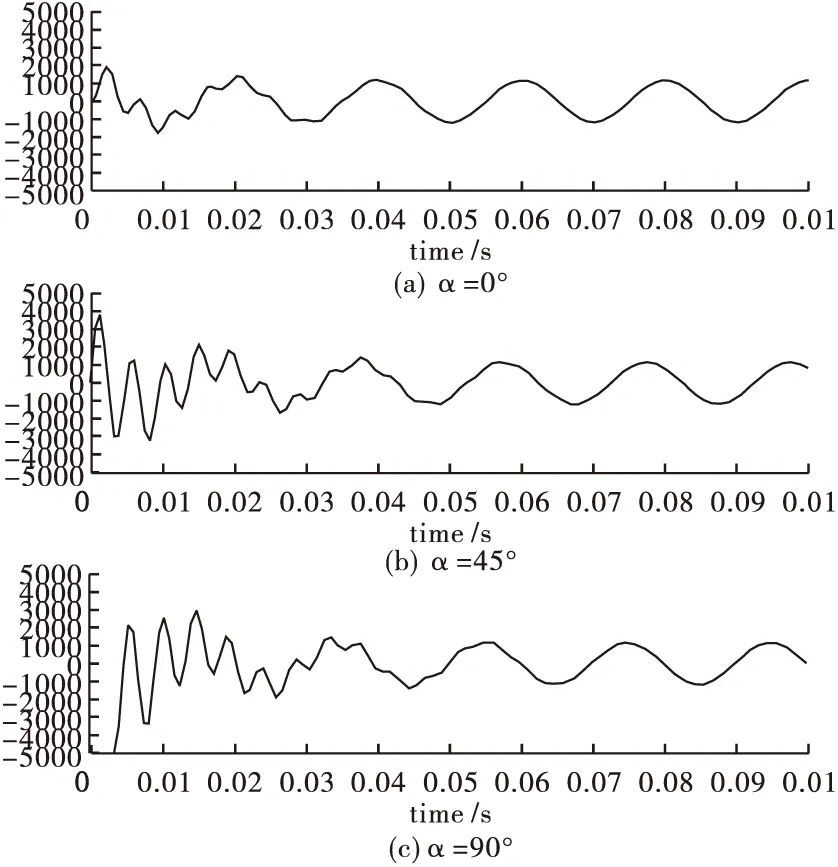
图2 同相角下关合电容器的涌流仿真分析
从图2中可以看出,当α为0°时,涌流的幅值大约为稳态值的1.5倍,同时关合时的暂态过程较短;当α为45°时,涌流的幅值有明显的增大,大约为稳态值的3.2倍;当α为90°时,涌流的幅值进一步增大,达到稳态值的4.2倍左右,且暂态持续过程较长,对电力设备造成的危害较大。当α在0°~90°范围内,涌流的幅值随着α的增大而增大;当α在90°~180°范围内,随着α的增加,涌流幅值随之减小。因此,若能控制断路器在0°或180°附近关合电容器,就能极大地减少涌流及其对设备和系统的冲击,从而能够比较理想的达到保护电力设备的效果[3]。
2.2 同步关合的动作过程
图3描述了同步关合的动作过程。
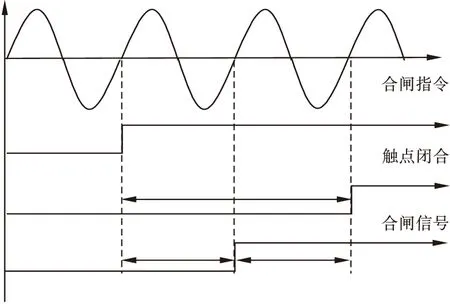
图3 同步关合过程
选择系统电压初相角为0°时进行同步关合。其中,T0为总共所需的合闸时间;Td为合闸指令发出后的延迟时间;T0为断路器触头动作时间。在合闸指令发出后后,处理器根据一定的算法计算出断路器合闸所需要的时间,然后根据零点的位置计算出合闸指令需要延时的时间Td,从而保证在指定的相角处能可靠关合。
同步关合技术成功的关键就在于精确的控制合闸和分闸时的相位。相位控制的精确度受到很多因素的影响,如主控芯片的数据处理速度、操动机构动作的时间分散性、断路器触头的预击穿等。因此同步控制技术的关键就在于能够准确的计算出电压及电流的过零点。
3 永磁机构同步关合的影响因素
3.1 控制电压对合闸时间的影响
永磁机构的同步控制是通过其配备的分合闸线圈的通断实现的,因此控制电压的大小会对分合闸线圈电流的大小和铁心运动速度的变化造成直接影响。合闸线圈的放电电流的表达式为:
i=Imsinωt
(4)
(5)
(6)
U为电容电压,即控制电压的大小对合闸线圈的放电电流具有直接的影响。合闸时,合闸线圈的电感是随铁芯位移而不断发生变化的,因此,控制电压的大小与断路器操动机构合闸时间之间的关系是很复杂的,并且可以肯定的是,合闸时间必然受到控制电压大小的影响[4]。在经过反复试验后,拟合出了控制电压大小与操动机构合闸时间之间的关系曲线图,如图4所示。从图中可以看出,控制电压越大,合闸时间越短,且二者之间近似呈线性关系。由图中可知,合闸时间的变化率在控制电压为166V左右发生了变化,综合来看,其随控制电压的变化率在0.244ms/V左右。
3.2 环境温度对合闸时间的影响
从图4中可以看出,环境温度同样对合闸时间有着不可忽略的影响,温度越低则操动机构合闸时间越长。其对断路器合闸时间的影响具体表现在以下几个方面:

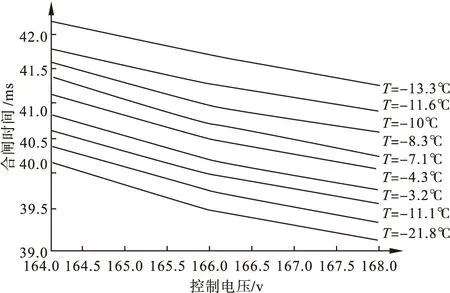
图4 控制电压与合闸时间的关系曲线
(2)温度变化对永磁体性能的影响。永磁体磁性能会随着温度的变化而变化,以钕铁硼为例,其矫顽磁力会随温度的上升而降低,这种变化可由温度系数来描述,温度是指当温度变化1度时,剩磁感应强度,矫顽力,内禀矫顽力可逆变化的百分率。矫顽磁力的降低会导致永磁体的吸合力减小,对断路器的合闸时间和合闸速度造成影响[5]。
(3)温度变化对运动阻尼的影响。在断路器永磁机构动作的过程中会遇到摩擦阻尼、粘滞阻尼以及空气阻尼的影响,当温度发生变化时,会引起相应阻尼系数的变化,使永磁机构的反力特性发生改变,从而影响断路器的合闸速度与时间。
3.3 预击穿的影响
在真空电极间隙施加电压,随着间隙电压的不断升高,真空间隙击穿前,电极间出现微小的预击穿电流,如果真空间隙上的电压进一步提高,间隙间就会突然发生火花放电,也就是真空间隙的完全击穿。真空间隙中的电流会随着预击穿到完全击穿的过程而迅速增大,其电流值可以在几十毫秒的时间内从毫安级别迅速增大到数百上千安,同时,真空间隙中的电压值会迅速降低到数十伏。
同步关合初始相角的选择与真空断路器的预击穿特性有关。如图5所示,预击穿特性可以由系统电压的绝对值来考虑,同时,断口耐压与合闸速度密切相关,较低的关合速度会使断口耐受电压对时间的特性曲线斜率较低,如图中直线簇A所示,当断路器的关合速度较低时,断路器中的真空间隙会在预定合闸相位之前导通,从而导致较大的瞬态电压;而较高的关合速度会使该斜率较高,从而保证合闸过程中不会发生预击穿,如图中直线簇B所示。所以,只有达到一定的关合速度才能够实现同步关合[6]。

图5 预击穿特性图
由图5可知,当耐受电压对时间的特性曲线与系统电压过零点处相切且关合速度较高时,即可实现断路器的同步关合,并且不会发生预击穿的现象。保持同样的关合速度,当特性曲线的合闸相位滞后于零点相位时,在关合的瞬间会产生一个较高的过电压;反之,当特性曲线的合闸相位超前于零点相位时,在关合的瞬间则会产生相对较低的过电压。在实际操作中,如图6所示,断口电压对时间的特性曲线一般都介于B1与B2之间,由于但断路器合闸动作时间具有分散性,一般选择在电网电压波形过零点1ms左右关合,以减小预击穿发生的可能性,保证较好的关合效果。

图6 预击穿的统计特性图
3.4 老化与磨损对合闸时间的影响
断路器的操动机构每次开断时都会对触头产生碰撞,尤其是关合速度较快时,触头的碰撞更为强烈,从而导致断路器在开断一定次数后,触头会产生一定程度的磨损与老化,进而影响操动机构的开断行程,导致合闸时间发生一定程度的变化[7]。
4 断路器同步关合技术的实现
4.1 电压电流信号过零点的提取
同步关合系统必须能获取电网电压或电流过零点的准确时刻,才能以此为基准预测出电压、电流的同步关合点时刻,并进一步确定永磁机构分合闸信号的发出时刻。但由于实际的电压电流信号中成分复杂,还包含各次谐波分量及噪声,会大大影响信号的测量精度,因此,在获取电压电流过零点前,必须先去除信号中的噪声,我们可以将电力系统中的噪声看作是随机性最强的白噪声,并采用FIR数字滤波器对原始采样信号进行滤波,通过线性插值的方法来提取基波电压或电流的零点。
FIR 的突出优点是:系统稳定,易于实现线性相位,允许设计多通带(或多阻带) 滤波器[8],其差分方程为:

(7)
其中x(n)为输入序列,y(n)为输出序列,h(k)为滤波器系数,N为滤波器的阶数。
本文选用窗函数法设计线性相位FIR带通滤波器,选用具有较好频谱分辨率的海明窗(hamming)。设计滤波器阶数N为64,带通上下截止频率为55、45Hz,采样频率fs为3.2kHz,利用Matlab软件中的fdatool工具箱设计FIR滤波器,设置好相应参数后进行仿真,得到如图7和8所示的FIR滤波器的幅频响应和相频响应,从图中可得此滤波器具有较好的幅频与相频特性,符合零点检测的要求。

图7 FIR滤波器的幅频响应
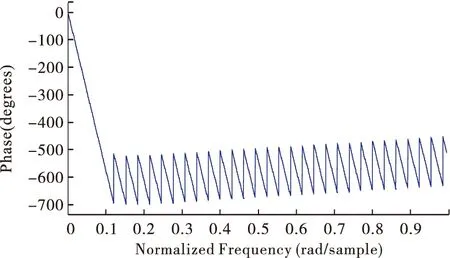
图8 FIR滤波器的相频响应
在设计完成数字FIR滤波器以后,利用matlab仿真软件进行仿真测试,测试结果如图9所示。其中Uf为基波信号,Ui为混入谐波噪声后的输入信号,通过FIR滤波器对输入信号Ui进行滤波处理,结果如Uo所示,从图中可以看出,滤波效果明显且相位延迟180°,可以很好地进行电压电流零点信号的提取,其中相位延迟是由滤波器的延时作用造成的,可由如下公式计算延时时间:
(8)

图9 滤波器滤波前后波形比较
在滤波结束后可用线性插值法计算过零点,在采样过程中,当采样到的相邻两个数据异号时,则该两点之间必包含过零点。当采样频率足够高时,过零点处的采样曲线可近似看作直线。设第n+1个采样点y(n+1)和第n个采样点y(n)异号,则过零点时刻tz的计算公式可由线性插值公式表示为:
(9)
式中,tz为过零点时刻,tn为第n个采样点的时刻,fs为采样频率。
4.2 基于神经网络的分合闸时间预测
在计算出电网电压过零点以后,还需要能够准确计算断路器分合闸所需要的时间,以求出准确的延时时间,实现断路器的同步控制。由第二节的分析可知,真空断路器的分合闸时间由多种因素决定,其中最重要的两个因素是环境温度和控制电压,再结合断路器的机械磨损和老化,这些因素综合起来对断路器分合闸时间的影响非常复杂,很难用数学解析的方法建立它们之间的联系,应该通过进行大量实验确定这些运行变化的影响,然后对这些实验数据进行BP神经网络建模建立环境温度、控制电压与合闸时间的关系,实现操动机构动作时间的自适应计算[9]。
目前在人工神经网络的实际应用中,绝大部分网络模型是一种无反馈多层前向网络-BP网络和它的变化形式。BP神经网络通常具有多层结构,包括输入层、输出层和隐含层。为简化BP 网络的设计、减少网络的训练时间,这里采用3 层BP 网络。输入信号有控制电压和环境温度,输出为动作时间。从而可确定输入层节点数为2,输出层节点数为1,隐含层节点数在训练过程中确定。
从图4所示的曲线中采集训练样本数据,选取不同的隐层数对BP神经网络进行训练。由于动作时间的取值范围较大,故输出层采用线性神经元,隐含层采用S形神经元。为了提高BP神经网络的收敛速度,采用L_M算法训练网络[10]。通过训练发现,隐含层层数选择6比较合适,此时既有好的训练精度,又有较快的收敛速度,其BP网络结构如图10所示。
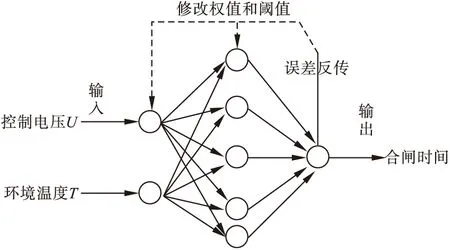
图10 BP网络结构图
5 结语
本文论述了同步关合技术的意义和在永磁机构上实现的可能性,通过对切断电容器的同步关合仿真,验证了同步关合的重要性及理论正确性,再经过分析影响同步关合技术的关键因素,分别对其分析并给出解决方案,为智能断路器的设计提供依据,提高断路器的操作精确性。
综合以上分析,同步关合控制系统应该包括电压电流过零点检测、合闸时间计算、内部延时计算等综合功能,其原理框图如图11所示。
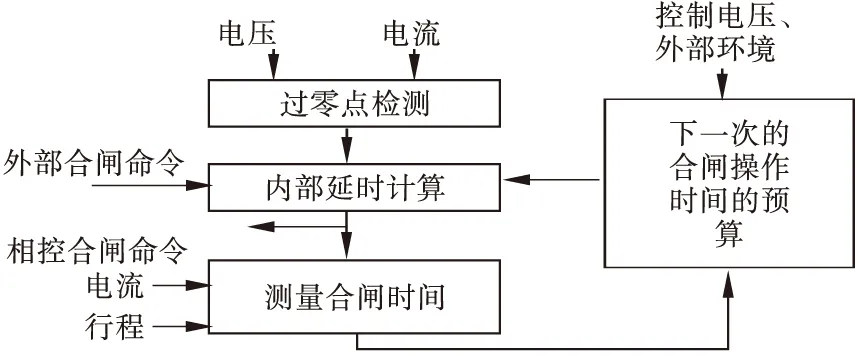
图11 同步关合控制系统原理图
[1] 林莘.永磁机构与真空断路器[M].北京:机械工业出版社,2002.
[2] Zhang Qingjie,Yuan Haiwen,Liu Yingyi.The Operating Transient Process Analysis and Synchronous Switching StrategiesResearch of Vacuum Breaker[C].2010 Fourth International Conference on Genetic and Evolutionary Computing,2010:7695-4281.
[3] 白申义,魏金成,孙树平.智能断路器的同步关合控制研究[J].西华大学学报,2009,28(1):159-167.
[4] 杜金婷.永磁真空断路器同步控制技术的研究与实现[D].北京:北京交通大学,2012.
[5] 谢将剑,李鹏,崔国荣.基于永磁操动机构的同步关合关键技术的研究[M].高压电器,2010,7(7):113-118.
[6] 孙浩,徐建源,杨志勇,等.同步关合永磁机构真空断路器驱动控制器的研究[J].低压电器,2010,28(12):530-553.
[7] 张庆杰,袁海文.配永磁机构的真空断路器同步分合闸控制系统设计与实现[J].电力自动化设备,2010,30(3):98-102.
[8] 李茂清,王洁,陈强,等.基于MATLAB 程序的FIR 滤波器设计实现[M].电力学报,2008,23(2):650-654.
[9] 周开利,康耀红.神经网络模型及其Matlab仿真程序设计[M].北京:清华大学出版社,2005:101-106.
[10] 董长虹.Matlab神经网络与应用[M].北京:国防工业出版社,2005.
Research and Simnlation on the Synchro Switching Technology of Permanent-magnet Vacuum Circuit Breakers
CHENYa-bin,GUWei-kang,LIUQing-dong
(School of Electrical Engineering,Southeast University,Nanjing 210000,China)
This paper start with the significance and principle of the synchronous closing technology,theoretical analyzed the phaseselectionstrategies of closing capacitors,and verify through the Matlab simulation.Then the factors effectingthe synchronous switching of PMA has been analyzed,including the prebreakdown characteristics ofvacuum circuit breaker,and the influence of control voltage and environment temperature and aging and wearingon closing time,through the analysis of these effect factors,the key technology of PMA based synchronousswitching has been researched,and using FIR filter to detect the zero-crossing of the reference signal,adopting BP neural network and adaptive algorithm topredict the closing and opening time of vacuum circuit breaker.
permanent magnetic actuator;synchronous control technology;BP neural network
1004-289X(2015)03-0076-06
TM56
B
2014-04-09
陈亚彬(1990-),男,硕士研究生。