基于序列图像匹配的车载自主测速方法
2015-06-01刘红亮陈维义许中胜
刘红亮,陈维义,许中胜
(1.海军工程大学兵器工程系,湖北武汉430033;2.海军驻中南地区光电系统军事代表室,湖北武汉430073)
基于序列图像匹配的车载自主测速方法
刘红亮1,陈维义1,许中胜2
(1.海军工程大学兵器工程系,湖北武汉430033;2.海军驻中南地区光电系统军事代表室,湖北武汉430073)
针对常见车速测量方法存在测速准确性较低、自主性较差和灵活性不足等问题,建立了车载自主测速模型,将车辆的测速问题转化为序列图像的匹配问题;结合车辆运行状态的约束条件和序列图像的成像特点,依次从特征提取、相似性度量、搜索空间和搜索策略等4个方面对序列图像匹配方法进行分析,并设计序列图像匹配算法。仿真结果表明,采用基于二值图像的匹配方法和采用平均绝对误差作为相似性度量函数,保证了较低的运算复杂度,提高了运算效率;提出的图像匹配算法具有较高的匹配精度和匹配速度。最后通过载车试验验证了所提方法的整体有效性和可靠性。
车速测量;图像匹配;相似性度量;搜索策略
0 引 言
常见的车速测量方法主要有地感线圈法、多普勒雷达法和视频图像法[12]。地感线圈法必须挖开路面埋设线圈,受到线圈位置固定的限制,应用不灵活;多普勒雷达法不能克服雷达器件本身不足,且测速精度易受邻近车道车辆干扰[3];视频图像法通常是把摄像设备安装在道路中央一定高度的正上方,通过采集来往车辆在地面上的运动情况进行直接测速;显然,这种方法只能在特定测速区域内对车辆进行测速,且测速精度受摄像设备安装精度的影响很大[4]。
道路表面存在大小不同、形状各异的颗粒,这些颗粒对光线的反射能力各有差异,不同强度和角度的反射光经过车载成像设备就可以得到路面信息的序列图像,再借助于图像匹配技术便可间接实现对车辆速度的连续自主测量[56]。基于上述思想,本文设计了基于序列图像匹配的自主测速算法,以提高车辆速度测量的准确性、自主性和灵活性。
1 测速模型
假定车辆在路面上做刚体运动,成像设备安装在车辆左侧靠近后轮位置处。相机坐标系以成像设备瞬时成像点为原点,X轴与车辆瞬时运动方向相同,Z轴向下,始终与地面垂直;成像设备采集地面的瞬时图像信息,相邻两帧序列图像的成像间隔Δt恒定不变;测速模型如图1所示。假设p为地面上某点,点O和O′是相邻两帧图像的成像点,A’和B’分别是从成像点O和O′处拍摄的相邻帧图像。相邻帧图像之间拥有共同的地面成像区域,即点p在A’和B’中均有像点。

图1 测速模型
本测速模型具有以下特点:①成像设备经过标定之后,其所有的内外参数都可视为恒定不变;②序列图像是相同传感器从相同视角拍摄的,属于同种类型且比例关系一致的图像;③相邻两帧序列图像几乎是在相同时间(时间间隔Δt很小)和相同条件(包括相机标定、光照条件、运动状态等)下拍摄的,图像间的几何变形、灰度失真和噪声很小。因此,我们通过对相邻两帧序列图像A’和B’进行匹配,就能得到点p的像的运动速度Vp。假定序列图像A’和B’的匹配位置为(uo,vo),成像设备的像素尺寸为l,则

通过对成像设备进行标定,再结合成像设备的内外参数,可以确定成像设备透镜放大倍率β,根据式(2)间接求出车辆的运动速度V。

式中,像素尺寸l、透镜放大倍率β和序列图像相临帧的时间间隔Δt均为已知量,因此,车辆运动速度V的测量问题就转化为序列图像匹配位置(uo,vo)的搜索问题。
2 序列图像匹配
图像匹配主要包括特征提取、相似性度量、搜索空间和搜索策略等4大关键技术,其核心问题是综合考虑匹配精度和匹配速度,折中选择最佳匹配方案[7]。结合本文车载自主测速方法的实际情况,序列图像的匹配方案分析如下。
2.1 特征提取
特征提取,解决的是使用何种图像特征进行匹配的问题。最常见的图像特征是像素灰度值,基于灰度的图像匹配方法匹配精确比较高,但是受噪声影响明显,计算量很大,无法满足实时性要求。其他图像特征还有边缘、兴趣点和不变矩等。基于此类特征的匹配方法对图像畸变、噪声、遮挡等有一定的鲁棒性,匹配速度也要快很多,但是,此类方法的匹配精度不如基于灰度的方法[89]。
综合考虑匹配精度和匹配速度,本文采用基于二值图像的匹配方法。从256级灰度图像获得的二值图像的像素值只有0和1构成,既减小了图像匹配运算复杂度,提高了匹配速度,又保留了图像特征区域的可识别性,保证了匹配精度。
2.2 相似性度量
相似性度量,解决的是不同图像匹配程度的度量问题。降低相似性度量函数的计算复杂度是提高图像匹配速度的有效途径之一。常用的相似性度量函数主要有去均值归一化相关(mean-residual normalized production correlation,NNPROD)函数、平均平方差(mean square difference,MSD)函数、平均绝对误差(mean absolute difference, MAD)函数等[10-12]。
(1)NNPROD函数

式中,m×n为窗口图像的像素个数;Yj,k表示当前帧窗口图像在像素点(j,k)处的值;Xj+u,k+v表示前一帧窗口图像在像素点(j+u,k+v)处的值,¯X和¯Y分别表示窗口图像像素点的均值。显然,去均值归一化相关函数的值越大表明图像之间的匹配程度越高。尽管该函数有很好的区分能力,但计算量比较大,且乘法、除法运算较多,因此实时性较差。
(2)MSD函数

MSD以当前帧和前一帧的窗口图像在对应像素点的差值的平方和的均值作为度量标准,函数值越小表明序列图像之间的匹配程度越高。
(3)MAD函数

MAD以当前帧和前一帧的窗口图像在对应像素点的绝对差值之和的均值作为度量标准,函数值越小表明序列图像之间的匹配程度越高。由于本文是通过二值图像的匹配实现序列图像之间的匹配,而二值图像的像素值只有1或0两种可能,平均绝对误差函数既计算复杂度低,实时性好,又直观简便[13],因此,本文采用MAD函数作为相似性度量函数。
2.3 搜素空间
搜索空间,解决的是搜索范围的确定问题。如果前后两帧序列图像之间仅仅存在平移变化,那么一个二维的搜索空间就足够了;如果是更一般的刚体变换、仿射变换或非线性变换,搜索的难度就可能很大。在车载成像设备采集的地面图像中,相邻两帧序列图像之间只存在简单的平移变化,这不仅大大降低了匹配搜索的难度和计算量,也有利于提高匹配成功的概率和匹配精度。
设序列图像的大小为M×N像素,在当前帧图像中选取大小为m×n像素的窗口图像,如图2所示。如果直接把前一帧图像作为搜索空间,按照像素顺序依次进行搜索匹配,则需要进行的匹配次数为(M-m+1)×(N-n+1)。显然,这种方法计算量很大,匹配速度很慢[14]。
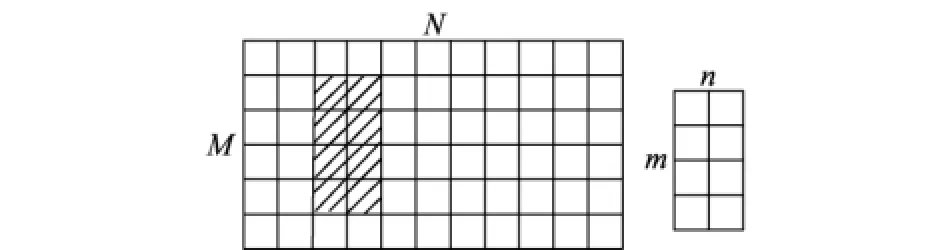
图2 序列图像和窗口图像
系统采集到的序列图像满足以下约束条件:①根据车速的连续性原理,如果已经测得t-Δt时刻相邻两帧序列图像的匹配位置为(u,v),车速为V,则在t时刻,车速通常非常接近V,相邻两帧序列图像的匹配位置自然非常接近(u,v);②根据车辆最大加速度有限原理,若车辆最大加速度为a,t-Δt时刻车速为V,则在t时刻,车速的范围为[V-a ×Δt,V+a×Δt],由此可以确定t时刻相邻两帧序列图像的匹配位置的搜索范围。
根据上述约束条件,可以分别确定匹配搜索的起点和范围,进而确定搜索空间。相比于直接把前一帧图像作为搜索空间,这显然大大减少匹配搜索的次数和计算量,同时提高匹配速度。
2.4 搜索策略
搜索策略,解决的是怎样进行匹配搜索的问题。常用的搜索策略有穷尽搜索法、三步搜索法、十字对数搜索法等[15-16]。不同的搜索策略有不同的搜素效率和精度。当搜索空间确定之后,搜索策略的好坏直接影响搜索匹配的次数和速度。
本研究中成像设备固定安装在车辆左侧靠近后车轮位置处,在很小的时间间隔Δt内,车辆后车轮可以视为沿直线运动。如图1所示,相邻两帧序列图像之间仅仅存在平移变化,且X轴方向的平移变化较大,Y轴方向的平移变化很小。因而,采用沿X轴方向的一维搜素匹配算法就可以得出车辆的运动速度;同时,可以在完成序列图像X轴方向的搜索匹配之后,适当考虑Y轴方向的搜索匹配,这样既能更加精确地得出车辆的运动速度,又兼顾了搜索匹配的速度。因而,本文的搜索策略具体步骤如下:
步骤1 根据t-Δt时刻序列图像的匹配位置(u,v),确定t时刻匹配搜索的起点和范围;
步骤2 以(u,v)为t时刻匹配搜索的起点,依次完成(u,v),(u+1,v),(u-1,v)等3像素点处的序列图像匹配;
步骤3 若(u,v)像素处的平均绝对误差函数最小,则(u,v)即为序列图像在t时刻沿X轴方向的最佳匹配位置,记为(u+p,v);否则,以上述3像素点中平均绝对误差函数最小的像素点为新搜索的起点,返回步骤2。
步骤4 以序列图像在t时刻沿X轴方向的最佳匹配位置(u+p,v)为搜索的起点,依次完成(u+p,v)周围3×3范围内9像素点处的序列图像匹配;
步骤5 若(u+p,v)像素处的平均绝对误差函数最小,则(u+p,v)即为t时刻序列图像的匹配位置,记为(uo,vo),匹配搜素结束;否则,以该9像素点中平均绝对误差函数最小的像素点为新搜索的起点,返回步骤4。
该搜索策略建立在车载序列图像的成像特点的基础之上,结合了全局范围内的一维快速搜素和局部范围内的穷尽搜索两种处理方式;局部搜素范围是由一维快速搜素给出的,这就保证了匹配速度;但它本质上仍属于穷尽搜索,从而保证了匹配精度[17]。
2.5 匹配算法
相邻帧地面序列图像匹配算法步骤如下:
步骤1 在序列图像当前帧中选取一个适当的窗口图像,对该窗口图像进行二值化处理,得到其二值图像;
步骤2 利用第2.3节的搜素空间原理在前一帧图像中确定当前帧窗口图像可能的匹配区域,并提取该待匹配区域的二值图像;
步骤3 利用第2.2节的MAD函数最小准则和第2.4节的搜素策略对前两步获得的二值图像进行搜素匹配,完成序列图像间的匹配。
3 仿真分析及试验
3.1 相似性度量函数的性能
为了比较相似性度量函数的性能,以成像设备采集的地面序列图像为研究对象,序列图像的大小为1 024× 1 024像素,当前帧地面图像2是由前一帧地面图像1沿X轴方向平移256个像素得到,窗口图像的大小为256×128像素。为了更接近实际情况,当前帧地面图像2还加入了零均值高斯白噪声。相邻帧地面序列图像及其二值图像如图3所示。可见,对地面序列图像进行二值化一方面降低了匹配运算的复杂度,提高了匹配速度,另一方面保留了序列图像的大部分信息,保证了匹配精度;相比于灰度图像和其他特征图像,基于二值图像的匹配方法在图像匹配速度和匹配精度两个方面都有一定的优势[18]。由式(4)和式(5)可知,二值图像的MSD和MAD大小完全一致,图4是在匹配位置附近3种相似性度量函数的曲线,NNPROD在256像素处得到最大值,MSD和MAD在相同位置处得到最小值,3种函数都能精确得到图像匹配位置;根据表1可知,在计算机参数不变情况下,平均绝对误差函数的计算效率更高,实时性更好,采用平均绝对误差函数作为相似性度量函数更有优势。
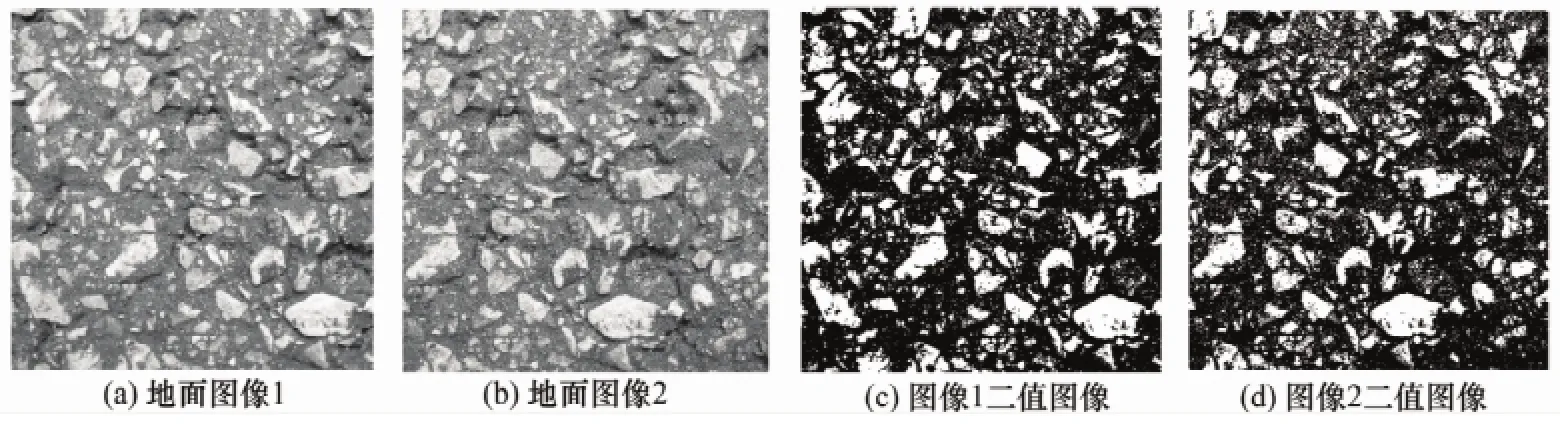
图3 地面序列图像及其二值图像

图4 相似性度量函数

表1 相似性度量函数的运算效率
3.2 搜索策略的匹配效率
相似性度量函数确定之后,匹配效率的高低主要取决于搜索策略的优劣。不同的搜索策略决定了匹配搜素次数的多少,因此本文用匹配搜索次数的多少来表征搜索策略的匹配效率。为了便于计算,假定车辆做直线运动,最大加速度为a=5 m/s2。其他参数设置如下:像素尺寸l=14μm,透镜放大倍率β=1/20,相邻帧序列图像时间间隔Δt=1/30。由于车辆沿Y轴方向的平移变化近似为0,即vo=0,由式(2)可得
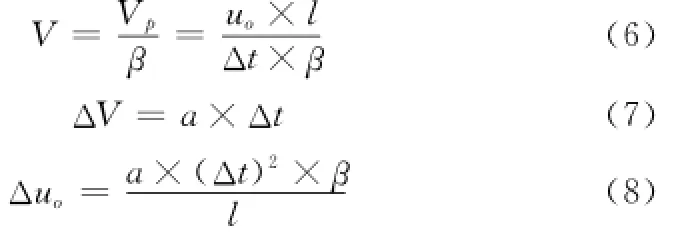
因此,相邻两帧序列图像匹配搜素的范围为[-20,20]像素。因此,在确定前一时刻的匹配位置(u,v)之后,将当前时刻的搜索空间设为41×41。为了研究本文搜素策略的匹配效率,依次比较车辆在匀速直线运动和加速度为a=4 m/s2时匀加速直线运动状态下穷尽搜索法、三步搜索法[19-20]和本文搜索方法3种搜索策略的匹配搜索次数,结果如表2和表3所示。可见,在这两种运动状态下,本文搜素策略比其他两种搜索策略具有更高的搜索匹配效率。

表2 匀速直线运动时搜索策略的匹配效率

表3 匀加速直线运动时搜索策略的匹配效率
3.3 载车试验
为了验证本文提出的测速方法的测速精度和有效性,采用考休斯-达特朗传感器有限公司的Kistler S-350型光电传感器进行载车试验,该型传感器的测速原理与本文所述方法相近。试验载车上装配有高精度全球定位系统(global positioning system,GPS),用来提供载车运动速度的真值。在长达92 min的试验过程中,车辆开始时处于静止状态,运动过程中出现过几次暂停,平均速度保持在10 m/s左右,测速仪的输出速度以及它与高精度GPS输出的载车真实速度的误差分别图5和图6所示。
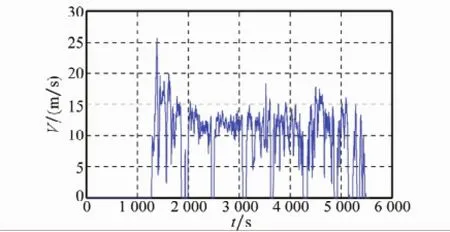
图5 测速仪输出载车速度
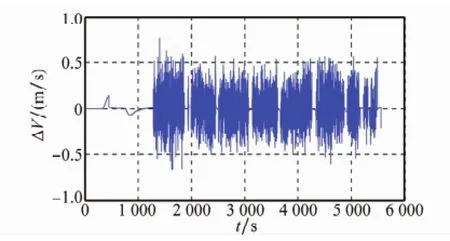
图6 测速仪输出速度与载车真实速度的误差
可见,测速仪的输出速度与载车真实速度保持了很好的一致性,两者的测速误差基本控制在-0.5~0.5 m/s,速度误差的均值为0.010 57,方差为0.026 08,这说明测速仪具备与高精度GPS相当的测速精度,而测速仪具有GPS不具备的自主性、隐蔽性和环境适应性。这也很好验证了本文提出的车载自主测速方法具有很高的测速精度和实用价值。
4 结 论
针对常见车速测量方法存在的不足,本文提出了一种新的基于序列图像匹配的车载自主测速算法。该算法充分利用了车辆运行状态的连续性和序列图像的成像特点,具有测速精度高、自主性好和使用灵活的优点。仿真结果表明,该算法中使用的相似性度量函数运算复杂度更低,运算效率更高;该算法中提出的图像匹配搜素策略在匹配精度和匹配速度两个方面都有良好表现。最后通过现有光电传感设备的载车试验进一步验证了本车载自主测速方法的有效性和实用价值;但是,本测速方法获得的测速结果只是车辆速度的数值,不包含速度的方向信息,因此该测速方法只能作为车辆的辅助导航手段,如何实现其与惯性导航系统等其他自主导航设备的组合导航是今后研究的重点。
[1]Liu L,Du W T.The vehicle-borne electronic image stabilization system based on gray projection algorithm[C]∥Proc.of the International Conference on Electric Information and Control Engineering,2011:4687- 4690.
[2]Hu F F.Technology of vehicle speed detection basic on video[D].Xi’an:Chang’an University,2010.(胡方方.基于视频的车辆速度检测技术研究[D].西安:长安大学,2010.)
[3]Liu Z,Wei X Z,Li X.Novel method of range and velocity measurement based on frequency domain waveform analysis in stepped chirp radar[J].Systems Engineering and Electronics,2011,33(8):1756- 1759.(刘振,魏玺章,黎湘.基于频域波形分析的调频步进雷达测距测速新方法[J].系统工程与电子技术,2011,33(8):1756- 1759.)
[4]Jin T,Chen B,Zhou Z.Image-domain estimation of wall parameters for autofocusing of through-the-wall SAR imagery[J].IEEE Trans.on Geoscience and Remote Sensing,2013,51(3):1836- 1843.
[5]Jin S F,Hu Y B.Machine-vision-based study on driving speed of construction machinery[J].Chinese Journal of Construction Machinery,2012,10(4):446- 451.(金守峰,胡永彪.基于机器视觉的工程机械行驶速度的研究[J].中国工程机械学报,2012,10(4):446- 451.)
[6]Naeem S,Siraj S.A framework to select edge detection method using multi-criteria decision making[C]∥Proc.of the IEEE International Conference on Systems,Man and Cybernetics,2013:730- 735.
[7]Chen T Z,Li Y.The edge point registration method of SAR images based on the joint similarity[J].Journal of National U-niversity of Defense Technology,2013,35(4):67- 73.(陈天泽,李燕.基于联合相似测度的SAR图像边缘点特征配准方法[J].国防科技大学学报,2013,35(4):67- 73.)
[8]Zhang K,Li X,Zhang J.A robust point-matching algorithm for remote sensing image registration[J].IEEE Geoscience and Remote Sensing Letters,2014,11(2):469- 473.
[9]Li S J,Xiao L P,Gao L.Detection and tracking of moving targets in photoelectric imaging guidance[J].Systems Engineering and Electronics,2014,36(1):23- 30.(李少军,肖利平,高磊.光电成像制导中地面运动目标检测与跟踪[J].系统工程与电子技术,2014,36(1):23- 30.)
[10]Chalom E,Asa E,Biton E.Measuring image similarity:an overview of some useful applications[J].IEEE Instrumentation&Measurement Magazine,2013,12(2):24- 28.
[11]Burget R,Rai J K,Uher V,et al.Supervised video scene segmentation using similarity measures[C]∥Proc.of the International Conference on Telecommunications and Signal Processing,2013:793- 797.
[12]Mahyari A G,Yazdi M.Panchromatic and multispectral image fusion based on maximization of both spectral and spatial similarities[J].IEEE Trans.on Geoscience and Remote Sensing,2011,49(6):976- 985.
[13]Wu Y H,Jin L X,Zhang N.Improvement of fast integer pixel motion estimation algorithm for H.264[J].Optics and Precision Engineering,2013,21(4):195- 203.(吴银花,金龙旭,张宁.针对H_264改进的快速整像素运动估计算法[J].光学精密工程,2013,21(4):195- 203.)
[14]Héctor F,Gómez G,Marroquín L.Image registration based on kernel-predictability[J].Computer Vision and Image Understanding,2008,112(2):160- 172.
[15]Santamaria J,Damas S,Cordon O,et al.Self-adaptive evolution toward new parameter free image registration methods[J].IEEE Trans.on Evolutionary Computation,2013,17(4):545- 557.
[16]Jiao J C,Zhao B J,Zhou G.A fast image registration algorithm based on Fourier-Mellin transform for space image[J].Acta Armamentarii,2010,31(12):1551- 1556.(焦继超,赵保军,周刚.一种傅里叶——梅林变换空间图像快速配准算法[J].兵工学报,2010,31(12):1551- 1556.)
[17]Huang X J,Yao Y,Li D H.Searching strategy driven by situation awareness in game simulation system[C]∥Proc.of the 3rd International Conference on System Science,Engineering Design and Manufacturing Informatization,2012:56- 59.
[18]Wei N,Li B P,He Q.A novel correspondence searching strategy in multiocular vision[C]∥Proc.of the IEEE International Conference on Robotics and Automation.2012:1823- 1828.
[19]Li J X.Resolution method of range ambiguity based on threestep-search algorithm[J].Systems Engineering and Electronics,2011,33(3):557- 561.(李军侠.基于三步搜索算法的解距离模糊方法[J].系统工程与电子技术,2011,33(3):557- 561.)
[20]Liu S T,Gao D H,Yin F L.Infrared image segmentation method based on 2D histogram shape modification and optimal objective function[J].Journal of Systems Engineering and Electronics,2013,24(3):528- 536.
Research on vehicle-borne autonomous velocity measurement method based on sequence image matching
LIU Hong-liang1,CHEN Wei-yi1,XU Zhong-sheng2
(1.Department of Weaponry Engineering,Naval University of Engineering,Wuhan 430033,China;2.Navy Representative Office of Electro-Optics Systems in Zhongnan Area,Wuhan 430073,China)
In order to solve the problems of low precision,dependence and low mobility for common vehicle velocity measurement system,a vehicle-borne autonomous velocity measurement model is designed.Therefore,the problem of vehicle velocity measurement is transformed into sequence image matching.Considering the constrained parameters of vehicle movement and the characteristics of sequence images,sequence image matching method is analyzed in four aspects of feature extraction,similarity measurement,searching space and searching strategy.Image matching algorithm is also designed.The simulation result shows that the matching method base on binary images and similarity measurement of mean absolute error function ensure computation complexity greatly reduced with a high computation efficiency.And the proposed matching algorithm exhibits a behavior with a high matching precision and speed.The result of vehicular test proves the effectiveness and reliability of the proposed method.
vehicle velocity measurement;image matching;similarity measurement;searching strategy
A
10.3969/j.issn.1001-506X.2015.04.37
刘红亮(1986-),男,博士研究生,主要研究方向为武器系统核心子系统设计。E-mail:18860904@163.com
1001-506X(2015)04-0964-05
2014- 07- 02;
2014- 10- 29;网络优先出版日期:2014- 11- 15。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141115.1613.002.html
装备预研基金资助课题
陈维义(1966 ),男,教授,博士,主要研究方向为光电技术、武器系统总体技术。E-mail:Fredchen118@sohu.com
许中胜(1962-),男,高级工程师,主要研究方向为光电子装备应用。E-mail:xzs62@sina.com