舰载机多机一体化机务保障调度方法
2015-06-01苏析超陈俊锋
韩 维,苏析超,陈俊锋
(1.海军航空工程学院飞行器工程系,山东烟台264001;2.海军航空工程学院研究生管理大队,山东烟台264001)
舰载机多机一体化机务保障调度方法
韩 维1,苏析超2,陈俊锋2
(1.海军航空工程学院飞行器工程系,山东烟台264001;2.海军航空工程学院研究生管理大队,山东烟台264001)
为了有效提升舰载机多机机务保障的效率和保障人员的利用率,根据单机机务保障流程约束特性,建立了基于多计划评审技术网络的多目标多机一体化机务保障调度模型。针对问题的求解,提出了一种自适应混合差分进化算法。首先根据调度的网络化排队过程,设计了基于事件调度策略的解码方法。其次为了协调算法“探索”与“开发”的能力,引入了自适应的变异操作和交叉、变异参数控制。再次,针对工序块的平行组合排列特征,提出了4种邻域结构,进而在算法框架中嵌入了一种自适应多邻域局部搜索策略。最后通过仿真实验验证了模型和算法的可行性和有效性。
舰载机机务保障;多目标优化;差分进化算法;局部搜索
0 引 言
作为现代战场上的“海上霸王”,航空母舰及其舰载机航空兵摆脱了海面的二维限制,一直占据着军事大国海军装备序列中的核心地位。在航母编队中,舰载机是最关键的组成部分,航母全系统和航母战斗群的绝大多数作战使命都需要并且只能由舰载机来承担和完成[1]。其中,舰载机舰面保障作业调度时间跨度长,涉及面广,约束条件复杂,如何对其提供合理的规划或优化对提升舰载机作战效能具有重要作用。
目前国内外对舰载机调度方法的研究主要集中在人工智能领域。文献[2]针对舰载机甲板布列出动问题建立了布列调度多目标优化模型,并利用改进的混合粒子群优化(hybrid particle swarm optimization,HPSO)算法和遗传算法(genetic algorithm,GA)进行求解和对比。文献[3]采用多智能体技术,将舰载机维修保障过程建立为三层多智能体系统模型,并成功运用于保障人员配置问题的求解。文献[4]通过对一款名为甲板运作行动过程规划者(deck operation course of action planner,DCAP)的辅助飞行甲板管理软件的开发,研究了反向强化学习方法[5]和基于排队网络的策略优化[6]在舰载机自适应多阶段调度问题中的应用,并通过甲板作业仿真,将基于线性整数规划模型的优化算法与传统的专家启发式规则进行调度性能上的对比[7]。文献[8]根据所建立的舰载机运动约束模型采用改进A*算法求解,具有规划路径平滑且响应速度快等特点。航空机务保障方面,陆基机务保障主要采取固定机组制模式,存在人员利用率不高、保障缺乏弹性等特点,若应用于空间有限的舰面多机保障或将导致人员拥挤和危险系数增高等后果,因此,研究基于任务的舰载机多机一体化机务保障调度具有较强的现实意义。文献[9]和文献[10]分别将多机机务保障问题抽象为柔性开放车间和柔性流水车间问题,但均是基于工序串行约束的简化模型,这与舰载机保障工序复杂网络化约束的实际不符。
为此本文按照舰载机保障流程约束特性,以最小化保障时间和保障主体负载均衡为目标,建立基于多计划评审技术(multiple program evaluation and review technique,Multi-PERT)网络的多机一体化机务保障模型。设计了一种嵌入多邻域结构局部搜索的自适应混合差分进化(self-adaptive hybrid differential evolution,SaHDE)算法求解该模型。通过实例仿真和与其他调度算法的对比验证了算法的可行性和有效性。
1 舰载机多机一体化机务保障调度问题模型
1.1 保障作业流程分析与问题描述
舰载机多机一体化机务保障调度是指在单机保障流程约束下,通过合理调度保障单元,对多机型机群同时进行保障,以达到较优的出动效能和较高的保障资源利用率。在一体化保障模式下,保障单元可以摆脱固定机组模式的束缚,实现在不同舰载机之间的转换和保障。纳入一体化保障模式的舰载机可包含战斗机、攻击机、预警机、反潜机、电子战飞机等固定翼舰载机,且不同舰载机由于任务的区别而导致保障作业时间上的差异。舰载机单机保障作业根据保障的内容和性质划分为不同的专业类别,每一专业类别的工序由与之对应的若干组保障单元负责保障,而每个保障单元可由若干保障人员组成,如挂弹单元(可由2~4人组成)主要负责军械外观检查、挂架准备、填充炮弹和挂载导弹等军械类保障工序。且出于安全性和空间限制的考虑,不同工序间存在串、并行的约束关系。因此,本文通过构建Multi-PERT多机保障网络对多机一体化机务保障调度进行描述。图1所示为某波次出动简化的Multi-PERT多机保障网络图。

图1 Multi-PERT多机保障网络图
图1 中Oij为舰载机i的第j项工序表示工序Oij由MA类保障单元负责,且由于保障单元的技能经验、协作能力等的差异,其保障时间的取值范围为S和E分别为合成保障过程的虚拟开始和虚拟结束作业,Si为第i架舰载机的入场保障起始虚工序,Si之间的虚线表示入场保障的前后时间约束,Oi7之间的虚线则表示各舰载机保障结束时间的优先级约束。
在此基础上,为建立舰载机多机一体化机务保障调度优化问题模型,进行如下假设:①同一时刻某一工序只能接受一个保障单元保障;②保障单元在保障某工序的过程不可中断,且只能在上一道工序完成后才能进行下一道工序保障;③各舰载机保障项目之间除共享保障单元外,相互独立;④舰载机在各站位均能接受油电气液等“一站式”资源保障,无需中途转运;⑤不考虑突发故障和其他干扰因素。
根据上述分析可以看出,舰载机多机一体化机务保障调度优化问题本质上属于资源约束条件下多项目调度优化问题[1112],但主要存在两个方面的不同,一是本文的Multi-PERT多机保障模型是基于相同的单机PERT保障模型而建立的,即各项目(单机保障工序集合)具有相同保障流程;二是本文的调度问题不仅包括各项目工序的优先排序,还包括各项目工序在资源(保障单元)上的选择分配,问题的复杂性更高。
1.2 调度模型参数及决策变量定义
模型中各参数定义如下:
I={1,2,…,n}为参与保障的舰载机集合,其中,n为舰载机数量。
M={1,2,…,|M|}为保障单元集合,其中,|M|为保障单元数量。
Ji={1,2,…,m}为舰载机i的工序集,其中,m为单机工序数。
Mj为可对工序Oij进行保障的一类保障单元集合,且Mj⊆M。
Sij为舰载机i的第j道工序保障开始时间。TSi为舰载机i的入场保障起始时间。
Eij为舰载机i的第j道工序保障结束时间。
Tijk为舰载机i的第j道工序在第k(k∈Mj)个保障单元上的作业时间。
Pij为工序Oij的紧前工序集合。
HSi为虚工序Si的紧后工序集合。
Ci为舰载机i最后一道工序的保障结束时间。
Cmax为各舰载机的最大保障结束时间。
Cijeg为保障单元从舰载机i的第j道工序保障结束至舰载机e的第g道工序开始保障的转换时间。
ObVk为第k(k∈Mj)个保障组的闲忙比,即整个保障过程空闲时间与工作时间的比值。Eob为保障单元的闲忙比方差。决策变量定义为


1.3 调度模型的建立
根据舰载机保障调度的实际需求,调度优化的目的首先要提升保障效率,使得保障活动在最短的时间内完成;在保证保障时间最短的前提下,其次是使得保障单元的工作负载均衡化。因此选取最大保障完工时间Cmax=max(Ci)和闲忙比方差Eob两个指标作为优化目标。根据定义可得

其中,保障单元k的闲忙比为

工作时间bVk可表示为保障时间和转移时间之和,即

综合考虑保障的目标及各类约束,建立舰载机多机一体化机务保障调度优化模型为

其中,式(4)表示调度的目标,即在保证最小化最大保障完工时间的前提下,使得各保障单元闲忙比更为均衡;式(5)表示每架舰载机的任一工序只能在一个保障单元上保障;式(6)表示任一舰载机工序保障开始时间与结束时间的关系;式(7)表示作业的紧前关系约束,一个工序的开始必须保证所有紧前工序均保障结束;式(8)表示舰载机在入场系留后才能开始保障;(9)表示不同工序不能同时由同一保障单元保障,且保障按优先级进行,式中BM为足够大实数,确保不等式恒成立;式(10)表示决策变量的0-1属性约束。
2 基于SaHDE算法的问题求解
舰载机多机一体化机务保障调度问题是一类具有高度复杂性、多约束性和多目标性的NP-hard问题。舰载机保障工序众多,且随着舰载机保障数量的增加,问题的规模急剧增大,导致在问题的求解过程中容易陷入局部极值而找不到全局最优解。通过增大搜索空间和种群规模可在一定程度上增加得到全局最优解的概率,但无疑将耗费更大的计算量,降低搜索的效率。差分进化算法(differential evolution,DE)由Storn和Price提出后,便被证明是最强大的随机实参数优化算法之一[13],在解决实际调度问题具有很强的适应性和普遍性[14-15],并在诸如本文的多极值问题方面具有更优秀的求解能力[16]。本节在标准DE算法[17]的基础上,设计了改进的SaHDE算法。
2.1 染色体编码
经典资源受限多项目调度问题的求解常采用离散作业列表编码方式和随机数编码。若采用作业列表编码方式,则只能表示各舰载机作业的保障顺序,针对每道工序所选择的保障单元则还需增加一层编码列表加以表示。为降低编码的冗杂性,克服作业列表编码方式在进化操作中产生非法解的不足,本文采用基于矩阵的实数编码方式[14]。

式中,个体An×m,行表示舰载机编号,列表示工序号,任一元素aij为区间(1,Mj+1)上的一个随机实数。其中,整数部分Int(aij)表示舰载机i的第j道工序在第Int(aij)个保障单元上作业,小数部分Dec(aij)表示多个工序在同一保障单元上冲突时的优先排序,Dec(aij)越大代表优先级越高。将矩阵编码的每一列构成一小段,形成的染色体可以表示为一个长度为n×m的字符串:[a11,a21,…,an1,a12,a22,…,anm]。
2.2解码操作
解码过程是实现染色体向调度方案映射的过程,每一次解码都是对调度系统的一次仿真。根据Multi-PERT多机保障网络图可以看出,解码的每一步不仅取决于染色体上的信息,还需对工序的紧前紧后约束进行判断。不妨将舰载机多机机务保障调度看作是包含多种平行保障单元的网络化排队保障过程,任一道工序在满足紧前约束条件下释放到所选择的保障单元上,并根据优先级进行排队保障。本文采用离散事件仿真中的事件调度策略,通过基于最早发生事件的时钟推进机制,得到各个工序保障的起止时间等调度信息。
因此首先定义3类事件历程:E1-舰载机入场,E2-工序保障开始,E3-工序保障结束,每种事件分别设置相对应的未来事件表FEL1、FEL2和FEL3。记仿真时钟为TIME,第k个保障单元的等待保障工序队列集为Wk,执行保障工序集为Ak,已完成保障工序集为Ck。调度的每一步时钟推进到3类未来事件表中最早发生的时间,并处理对应的事件历程:
事件1 舰载机i入场,并将虚工序Si的紧后工序集HSi中的工序按照Int(aij)释放至对应的保障单元队列Wk,并更新FEL1。
事件2 第k个保障单元上的工序Oij保障开始,记录Sij并更新FEL2和FEL3。
事件3 第k个保障单元上的工序Oij保障结束,记录Eij,将Ak中元素转移至Ck,并判断Oij紧后工序的紧前工序集PHij是否均已保障结束,若是,则释放紧后工序集Hij至对应的保障单元队列。根据Dec(aij)选取Wk中下一保障工序,并将其转移至Ak,并更新FEL2和FEL3。
基于事件调度策略的解码(decoding algorithm based on event scheduling,DAES)算法描述如表1所示。

表1 DAES算法的伪代码
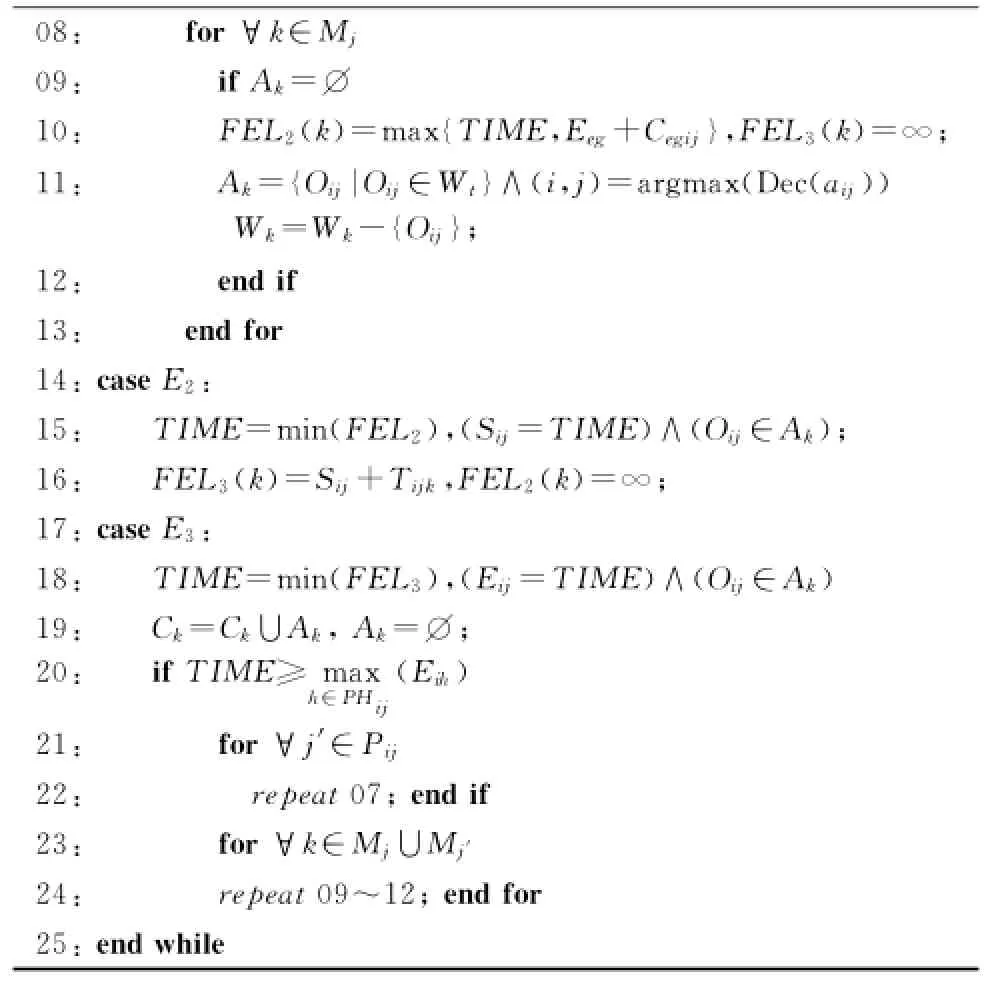
续表
2.3 自适应变异操作
基于种群的智能优化算法实现良好搜索性能的关键在于寻找“探索”与“开发”上的平衡,前者意味着算法“探索”或者“搜索”可行解空间各个区域的能力,后者则表示算法尽快收敛于近似最优解的能力。在常见的5种变异算子中[17],DE/rand/1和DE/rand/2变异策略以种群中的随机个体作为基本向量,有利于保持种群的多样性,但进化方向缺乏集中性,收敛速度慢;DE/best/1和DE/best/2变异策略以父代最优个体作引导,局部搜索能力强,精度高,但容易陷入局部最优而出现早熟;而DE/current-to-best/1变异策略采取本地个体与最优个体加权求和作为基本向量,在一定程度上平衡了全局寻优能力和收敛速度,但权重系数仅取决于缩放因子F,无法根据进化信息进行自适应调节。
受文献[18]的启发,本文在DE/current-to-best/1变异策略的基础上提出如下的改进:

式中,Xpbest,G是从当前种群的100p%的最优子种群中随机选取的个体;ωt为Xpbest,G与Xi,G的权重系数,为使得算法在前期执行阶段更注重“探索”,而在后偏向“开发”,加快收敛速度,对ωt采用非线性sigmoid递增函数

式中,t为当前迭代次数;T为最大迭代次数;参数A控制曲线曲率大小,A越小,则ωt越接近于直线增长;参数b控制由“探索”转向“开发”的时机,当b=0.5时,ωt随t的增加呈“S”型曲线增长,且在t=T/2处ωt=0.5。b值越小,说明由Xi,G为主导的搜索占总搜索过程的比例则越少,由探索转入开发的时机越早。因此可通过对参数A和b的控制,整体把握 “探索”与“开发”上的平衡。
2.4 自适应参数控制
除变异策略外,缩放因子F和交叉概率CR同样对搜索的性能起到重要作用。为了更好地利用种群信息以提升F与CR在迭代过程中的自适应性,本文采用种群多样性测试函数定义为

式中,Ns为种群规模;nm为染色体长度;¯xtj表示第t次迭代时群体平均中心位置的第j维分量。Dt越小,则个体内特征差异值越小,种群的多样性越低。通过对式(13)的变换,本文设计了一种基于种群多样性的参数自适应变化策略,表示为

式中,Dmax=max{Dt′,t′=1,2,…,t};Fl、Fu、CRl、CRu分别为缩放因子和交叉概率的最小、最大边界,扰动项采用范围更广的柯西分布;σ为人为给定的分布标准差,按经验取为0.1。在进化过程中,缩放因子和交叉概率随着种群多样性的变化而自适应变化,当种群多样性较高时,Fi和CRi缩小,增强种群的开发能力,加快收敛;反之当种群多样性较低,Fi和CRi增大,以增强种群跳出局部极值的能力,避免早熟收敛。基于柯西分布的扰动项一方面增加了参数的多样性,另一方面其相对于正态分布具有更强的两翼性,从而加大了寻优范围和跳出局部最优点的能力。
2.5 基于自适应多邻域结构的局部搜索
针对调度问题解空间的多极值性质,通过引入局部搜索可有助于引导算法高效到达存在众多局部极小的峡谷底部,并进行彻底的搜索[19]。而局部搜索的性能取决于所使用的邻域结构。
首先根据染色体中aij对应的Int(aij)值将所有工序分配至各保障单元,再根据Dec(aij)值对保障单元内的工序队列按照由小到大排列得到πk={Oij|(k=Int(aij))∧(k∈Mj)}。由此,对∀i∈I的第j道工序集,均可对应|Mj|个排序πk(k∈Mj)。针对上述平行工序排序,定义基于工序块的4种邻域结构如下:
(1)纵向交换邻域Interchange_V(πk1,u,πk2):表示对∀k1,k2∈Mj(k1≠k2),将πk1中第u位工序与πk2中各个工序依次交换位置。
(2)横向交换邻域Interchange_L(πk,u):表示对∀k∈Mj,将πk中第u位工序与πk中其他位工序依次交换。
(3)纵向插入邻域Insert_V(πk1,u,πk2):表示对∀k1,k2∈Mj(k1≠k2),将πk1中第u位工序取出,并依次插入至πk2中各个可插入位置。
(4)横向插入邻域Insert_L(πk,u):表示对∀k∈Mj,将πk中第u位工序取出,并依次分别插入πk中其他可插入位置。
其中,针对具体的交换和插入操作,可假设第u位工序Oij,第v位工序Oej和第v+1位工序Ofj。若令工序Oij与工序Oej交换,则令aij值与aej值互换;若令工序Oij插入至第v位和第v+1之间的空位,则令aij=aej+(afj-aej)· rand(0,1)。
显然,不同的邻域结构具有不同的局部搜索效果。横向交换邻域与横向插入邻域是通过改变单个保障单元内工序顺序进行局部搜索,而纵向插入邻域与纵向交换邻域则通过改变平行保障单元间工序位置进行局部搜索,且纵向插入邻域可改变保障单元内工序数量,对搜索前期起到平衡保障单元负载的作用,纵向交换邻域则不会改变保障单元内工序数量,这在搜索后期保障单元负载较均衡的情况下将发挥更大作用。
为了更有效地利用各种邻域结构的特点,借鉴文献[20]中SaDE算法的自适应变异策略,以上述定义的4种邻域结构作为局部搜索的选择对象,根据算法搜索过程中各邻域的贡献动态改变其使用率,进而达到自学习的搜索效果。具体算法过程描述如下:
步骤1 令pl(l=1,2,3,4)表示第l种邻域结构的选择概率和分别表示第t(t>LP)次迭代时之前LP代中第l种邻域结构搜索产生个体进入下一代的成功或是失败的数目表示第l种邻域结构搜索进入下一代的个体的成功率,初始化pl(l=1,2,3,4)=1/4,令j=1。
步骤2 选取染色体个体S内工序j的基因段Sj=(a1j,a2j,…,anj),将其转换为平行保障单元Mj上的工序排列。
步骤3 采取轮盘赌方式选择一种邻域结构L,并随机选取πk1、u和πk2(k2≠k1)。
步骤4 若L=Interchange_V,则Snew=Interchange_ V(πk1,u,πk2);若f(Snew)<f(S),则,且S= Snew,否则
步骤5 若L=Interchange_L,则Snew=Interchange_L(πk1,u);若f(Snew)<f(S),则且S=Snew,否则
步骤6 若L=Insert_V,则Snew=Insert_V(πk1,u, πk2);若f(Snew)<f(S),则,且S=Snew,否则
步骤7 若L=Insert_L,则Snew=Insert_L(πk1,u);若f(Snew)<f(S),则且S=Snew,否则
步骤8 按式(17)和式(18)更新各邻域的选择概率。


式中,ε为一个较小的值,其作用是控制Stl非零,本文取ε=0.01。在搜索初期,若t<LP,则令LP=t。
步骤9 令j=j+1,若j≤m,则转到步骤2;否则,输出最优解Snew。
2.6 SaHDE算法流程
基于本文Sa HDE算法求解舰载机多机一体化机务保障调度问题的具体步骤描述如下:
步骤1 初始化种群规模Ns,最优子种群比例p,最大迭代次数T,缩放因子和交叉概率的最小最大边界Fl、Fu、CRl、CRu,自适应控制参数A、b、b1、b2,保障舰载机数量n及各舰载机工序数m。记种群基因位aij的取值下界lower(aij)=1,上界upper(aij)=|Mj|+1,对种群各染色体基因位按aij=1+|Mj|·rand(0,1)进行初始化。
步骤2 按第2.2节DAES算法解码得到调度方案及种群个体适应度。
步骤3 根据式(14)计算种群多样性,并根据式(15)求得缩放因子Fi。
步骤4 选取100p%的最优子种群,按式(12)执行变异操作。若aij<lower(aij),则aij=2·lower(aij)-aij;若aij>up per(aij),则aij=2·up per(aij)-aij。
步骤5 根据式(16)求得交叉概率CRi,并进行二项交叉操作。
步骤6 对新种群进行解码,采取贪婪选择方式生成新种群。
步骤7 选取100p%的最优子种群,执行基于自适应多邻域结构的局部搜索。
步骤8 判断是否达到最大循环代数,若是,则输出最优调度方案;若否,则转入步骤2循环计算。
3 仿真分析
为验证本文模型的可行性和算法的有效性,结合保障的约束条件,建立一般化舰载机单机机务保障流程如图2所示。进一步简化,对单机机务保障网络流程中的串行工序进行合并,例如可将飞机下部机械检查和飞机上部机械检查合并为机械外观检查工序,最终可得到如图1所示的Multi-PERT多机保障网络图,其中包含4类平行保障单元。
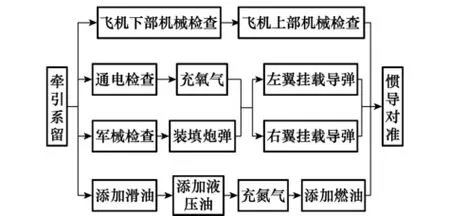
图2 舰载机单机机务保障流程图
以俄罗斯库兹涅佐夫号航母为仿真背景,任务想定A需要保障12架舰载机,并给出各架舰载机完成任务所需的挂弹加油等工序保障的需求量,参与保障的各类保障单元数量为|MA|=3,|MB|=3,|MC|=4,|MD|=5。各架舰载机通过机库和甲板上的调运计划得到的入场时间和布列站位如图3所示,其中未标明入场时间的舰载机表示TSi=0。
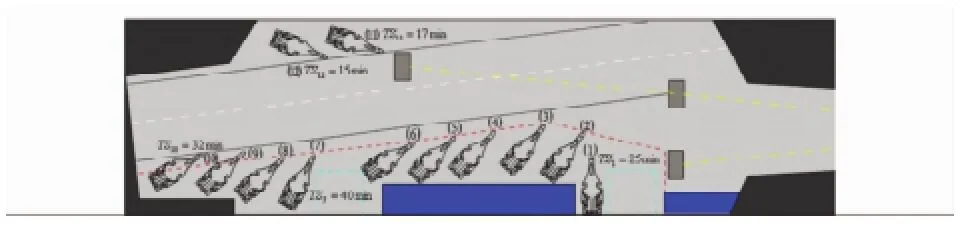
图3 舰载机站位及入场时序示意图
利用Matlab8.1软件编制仿真程序,参数设置为:种群规模Ns=50,最优子种群比例p=0.1,最大迭代次数T=400,缩放因子和交叉概率的最小最大边界Fl=0.3,Fu=0.6,CRl=0.6,CRu=0.9,自适应控制参数A=10,b=0.2,b1=b2=0.5,学习周期LP=30。
定义自适应差分进化算法(adaptive differential evolution algorithm,ADE)为在本文SaHDE算法基础上不采用局部搜索机制,DE1算法为采用DE/best/1/bin模式的标准DE算法,DE2算法为采用DE/rand/1/bin模式的标准DE算法,且DE1和DE2设置参数为F=0.5,CR=0.9。分别采用本文的SaHDE算法、GA算法、ADE算法、DE1和DE2进行30次独立运算,得到的结果如表1所示,其中,BST,AST,BOB和AOB分别表示30次运行结果所得的最优保障完工时间、平均保障完工时间、最小闲忙比方差和平均闲忙比方差。
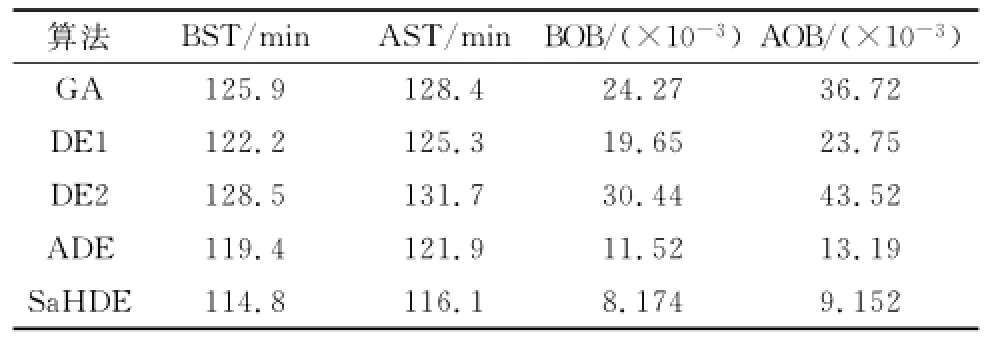
表2 算法性能对比
图4为DE1、DE2和ADE算法求得的保障时间最优解收敛对比曲线,图5为SaHDE算法、ADE算法和GA求得的保障时间最优解收敛对比曲线。

图4 DE1、DE2和ADE算法最优解收敛对比曲线

图5 GA、ADE和SaHDE算法最优解收敛对比曲线
结合表1、图4和图5可以看出:①在求解本文的多峰值问题的标准算法中,DE1的性能优于DE2和GA,收敛速度快,但易于陷入局部极值。②ADE通过引入自适应的变异策略和参数控制策略,结合了DE1的“探索”和DE2与“开发”的优势,性能较DE1和DE2均有所提升。③Sa HDE算法在ADE算法的基础上,引入自适应多邻域的局部搜索,进一步增强了算法跳出局部极值、避免早熟收敛的能力,同时具备较强的鲁棒性。
通过Sa HDE算法获得的一个最优调度甘特图如图6所示,其每一个条状框图中的前一个字母下标的数字表示正在保障的舰载机i(1≤i≤12),后一个数字表示舰载机的第j(1≤j≤7)道工序;阴影部分代表保障单元的转移时间;坐标纵轴对应保障单元,如表示A类保障单元中的第一组。所求得最优目标值Cmax=114.8min,Eob=8.174 ×10-3。

图6 最优调度甘特图
4 结 论
本文在分析舰载机单机机务保障流程的基础上,以最小化保障时间和保障主体负载均衡为目标,建立基于Multi-PERT网络的多机一体化机务保障模型。设计了一种嵌入多邻域结构局部搜索的自适应混合差分进化算法Sa HDE求解该模型。最后通过实例仿真和对比,验证了模型的可行性与所提出算法的优越性,对航母上的多机机务保障调度提供了新的思路和决策参考。
[1]Han W,Wang Q G.Conspectus of aircraft carrier and carrier plane[M].Yantai:Naval Aeronautical and Astronautical University Press,2009:37- 41.(韩维,王庆官.航母与舰载机概论[M].烟台:海军航空工程学院出版社,2009:37- 41.)
[2]Si W C,Han W,Shi W W.Comparison of deck-disposed methods for shipboard aircraft based on HPSO and GA[J].Systems Engineering and Electronic,2013,35(2):338- 344.(司维超,韩维,史玮韦.基于HPSO和GA算法的舰载机甲板布放方法比较[J].系统工程与电子技术,2013,35(2):338- 344.)
[3]Feng Q,Li S J,Sun B.A multi-agent based intelligent configuration method for aircraft fleet maintenance personnel[J].Chinese Journal of Aeronautics,2014,27(2):280- 290.
[4]Ryan J C,Cummings M L,Roy N,et al.Designing an interactive local and global decision support system for aircraft carrier deck scheduling[C]∥Proc.of the AIAA Infotech@Aerospace Conference,2011:1516.
[5]Michini B,Jonathan P.A human-interactive course of action planner for aircraft carrier deck operations[C]∥Proc.of the AIAA Infotech@Aerospace Conference,2011:1515.
[6]Dastidar R G,Frazzoli E.A queueing network based approach to distributed aircraft carrier deck scheduling[C]∥Proc.of the AIAA Infotech@Aerospace Conference,2011:1514.
[7]Ryan J C,Banerjee A G,Cummings M L,et al.Comparing the performance of expert user heuristics and an integer linear program in aircraft carrier deck operations[J].IEEE Trans.on Cybernetics,2014,44(6):761- 773.
[8]Wu Y,Qu X J.Path planning for taxi of carrier aircraft launching[J].Science China Technological Sciences,2013,56(6):1561- 1570.
[9]Luan X F,Xie J.Research on multi-aircrafts preparation process based on simulation optimization[J].Computer and Digital Engineering,2010,38(12):50- 53.(栾孝丰,谢君.基于仿真优化的多机机务准备流程研究[J].计算机与数字工程,2010,38(12):50- 53.)
[10]Wei C Q,Chen C L,Wang B R.Study of aircraft support scheduling of aircraft on carrier based on space restriction[J].Control Engineering of China,2013,20(4):699- 702.(魏昌全,陈春良,王保乳.基于空间约束的舰载机航空保障调度研究[J].控制工程,2013,20(4):699- 702.)
[11]Wang L,Fang C.A hybrid estimation of distribution algorithm for solving the resource-constrained project scheduling problem[J].Expert Systems with Application,2012,39(3):2451- 2460.
[12]Wang W X,Wang X,Ge X L,et al.Multi-objective optimization for multi-project scheduling on critical chain[J].Advance in Engineering Software,2014,68(2):33- 39.
[13]Zhao Y X,Yang X S,Liu L Q.Newly emerging meta-heuristic optimization methods[M].Beijing:Science Press,2013:220- 225.(赵玉新,刘利强.新兴元启发式优化方法[M].北京:科学出版社,2013:220- 225.)
[14]Tang L X,Yue Z,Liu J Y.An improved differential evolution algorithm for practical dynamic scheduling in steelmaking-continuous casting production[J].IEEE Trans.on Evolutionary Computation,2014,18(2):209- 225.
[15]Yuan Y,Xu H.Flexible job shop scheduling using hybrid differential evolution algorithms[J].Computers&Industrial Engineering,2013,65(2):246- 260.
[16]Das S,Suganthan P N.Differential evolution:a survey of the state-of-the-art[J].IEEE Trans.on Evolutionary Computation,2011,15(1):4- 31.
[17]Su H J,Yang Y P,Wang Y J.Research on differential evolution algorithm:a survey[J].Systems Engineering and Electronic,2008,30(9):1793- 1797.(苏海军,杨煜普,王宇嘉.微分进化算法的研究综述[J].系统工程与电子技术,2008,30(9):1793- 1797.)
[18]Ghosh P,Das S,Zafar H.Adaptive-differential-evolution-based design of two-channel quadrature mirror filter banks for subband coding and data transmission[J].IEEE Trans.on Systems,Man,and Cybernetics—Part C:Application and Reviews,2012,42(6):1613- 1623.
[19]Wang H Y,Zhao Y W,Wang W L,et al.New parallel algorithm based on DE for batch splitting job shop scheduling under multiple-resource constraints[J].Control and Decision,2010,25(11):1635- 1644.(王海燕,赵燕伟,王万良,等.两级差分进化算法求解多资源作业车间批量调度问题[J].控制与决策,2010,25(11):1635- 1644.)
[20]Qin A K,Huang V L,Suganthan P N.Differential evolution algorithm with strategy adaptation for global numerical optimization[J].IEEE Trans.on Evolutionary Computation,2009,13(2):398- 417.
Integrated maintenance support scheduling method of multi-carrier aircrafts
HAN Wei1,SU Xi-chao2,CHEN Jun-feng2
(1.Department of Airborne Vehicle Engineering,Naval Aeronautical and Astronautical University,Yantai 264001,China;2.Graduate Student’s Brigade,Naval Aeronautical and Astronautical University,Yantai 264001,China)
In order to improve the maintenance support efficiency and support personnel availability of multi-carrier aircrafts effectively,according to the constraint characteristics of maintenance support process for single-carrier aircraft,a multi-objective integrated maintenance support scheduling model of multi-carrier aircrafts based on multiple program evaluation and review technique networks is established.To solve the problem,a self-adaptive hybrid differential evolution algorithm is presented.First,a decoding method based on event scheduling is designed according to networked queuing process of scheduling.Second,for coordinating the exploration and exploitation in algorithm,a self-adaptive mutation operation,an adaptive control strategy of crossover and mutation parameters are introduced.Third,in view of the characteristics of parallel-arrangement of process blocks,four kinds of neighborhood structure are defined,and then a novel local search based on the newly defined neighborhoods is presented and imbedded in the Sa HDE algorithm.The simulation results show the feasibility of the model and the effectiveness of the algorithm.
carrier aircraft maintenance support;multi-objective optimization;differential evolution algorithm;local search
TP 301
A
10.3969/j.issn.1001-506X.2015.04.14
韩 维(1970-),教授,博士研究生导师,博士,主要研究方向为航空宇航科学与技术。E-mail:Luckydevilhan@163.com
1001-506X(2015)04-0809-08
2014- 05- 19;
2014- 07- 04;网络优先出版日期:2014- 09- 28。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140928.1625.016.html
国家自然科学基金(51375490)资助课题
苏析超(1989-),通讯作者,博士研究生,主要研究方向为舰载机技术研究及应用。E-mail:381410529@qq.com
陈俊锋(1988-),博士研究生,主要研究方向为舰载机技术研究及应用。E-mail:cjf053221@126.com
