作战仿真传感器模型探测处理通用方法
2015-06-01李元锋刘建平石成英
李元锋,刘建平,石成英,王 伟
(1.第二炮兵工程大学103教研室,陕西西安710025;2.中国人民解放军61683部队,北京100094;3.第二炮兵工程大学906教研室,陕西西安710025)
作战仿真传感器模型探测处理通用方法
李元锋1,刘建平2,石成英1,王 伟3
(1.第二炮兵工程大学103教研室,陕西西安710025;2.中国人民解放军61683部队,北京100094;3.第二炮兵工程大学906教研室,陕西西安710025)
指挥、控制、通信、计算机、情报、监视和侦察(command,control,communication,computer,intelligence,surveillance and reconnaissance,C4ISR)模型是作战仿真系统的中枢和灵魂,是作战仿真的重点和难点。在分析作战仿真情报、监视和侦察模型中的传感器模型对于探测处理的建模需求基础上,提出了传感器模型探测处理的通用方法,介绍了所提方法的整体流程,通过计算过程详细说明了所提方法的9个方面。通过模型的输入输出数据的结构并结合仿真验证实验,说明了该方法的适用性和通用性,提高了作战仿真传感器模型的运行效率,节约了开发成本,并为ISR建模与仿真提供了参考方法。
作战仿真;传感器模型;探测处理;通用方法
0 引 言
作战仿真[13]是研究现代战争、创新作战理论的科学方法,是论证作战方案、分析军事行动、验证军事效益的定性与定量分析的有效手段。指挥、控制、通信、计算机、情报、监视和侦察(command,control,communication,computer,intelligence,surveillance and reconnaissance,C4ISR)模型是作战仿真系统的中枢和灵魂,是连接传感器、作战平台、指挥人员等一切作战模型的纽带,是作战仿真运行的基础,是作战仿真的重点和难点,不仅需要对各类传感器、信息传输和处理系统进行建模,还需要对指控行为进行建模,构建观察、判断、决策、行动(observe,orient,decide and act,OODA)[4]的信息循环过程。一般传感器建模[512]中探测处理方法是针对不同类别传感器,针对其工作类型、功能要求对探测过程分别进行建模,开发成本高,周期长,且在仿真时需要处理的交互计算量大,不够高效,在建模时如果能够使用统一的探测处理方法进行建模,那么无疑会减少建模开发成本和时间,并且能够降低运算量,能够提高经济效益和运行效率。
传感器生产的情报产品种类繁多,工作模式各异,主要包括[13]:
(1)图像情报(红外、光电、合成孔径);
(2)信号情报(电子情报、通信情报);
(3)测量特征情报(移动目标指示);
(4)人力资源情报。
在本文中,传感器模型探测处理通用方法适用于7类传感器,分别为电子情报传感器、雷达传感器、红外传感器、通信情报传感器、光学情报传感器、主动声纳和被动声纳。
1 传感器模型建模需求
传感器能收集各种各样的目标信息,包括物理情报数据(如目标位置、海拔、深度、航向、速度、类别、身份和战斗毁伤状态等)和行动情报数据(如战场威胁排序、威胁就绪状态、威胁意图等),此外,传感器的有效探测距离和探测概率在很大程度上取决于其运行的电磁、声学和自然环境(如地形、水深和大气海洋分界面等)。因此传感器模型必须足够简单,既要满足想定规模和快速运行的要求,同时又必须足够精细,能够解决用户的业务分析问题,在这种平衡制约条件下,传感器模型必须满足下列需求:
(1)探测概率作为输入参数由用户控制;
(2)传感器可搭载于空间、空中、海面、海下或陆地平台上,每个传感器系统的探测范围随搭载平台运动;
(3)影响传感器覆盖范围的因素有:距离、方位角、俯仰角、目标接近速度、其他相关的目标信号增强因素等,对这些因素进行不同程度的限制,决定了复杂的、三维的传感器覆盖范围;
(4)假设某个传感器系统覆盖范围内存在目标,使用不同形式的“扫描率”探测模型。在此模型中,每个Δt(Δt为连续探测时机间的间隔)与收集不同类型数据的探测概率相关。对Δt和数据收集概率的选择通常为可以获得的、用于传感器系统、目标和感兴趣区域自然环境的瞬时概率和累积概率的符合条件对象。
2 传感器模型探测处理通用方法
2.1 方法流程
建模总体方法为,通过每个活动的传感器对目标进行扫描,对于每一个目标,首先检测传感器的扫描时间和目标活动时间是否匹配,其次为了方便输入和简化计算目的,对于传感器搭载的平台进行适当坐标转换,随后对于目标的作战隶属方、目标类型进行目标适应性检测,并对传感器的视场进行检查,针对特定类型传感器(如雷达、声纳、红外等传感器)的特定属性进行检查(考虑计算环境、电子干扰因素影响等),如果通过检查,计算传感器的累积探测概率,并根据跟踪目标轨迹的性能计算跟踪质量,最后生成探测报告,如图1所示。
2.2 传感扫描时间检查
传感器必须具有实时探测目标的能力,在传感器扫描前,传感器搭载平台必须处于激活状态且传感器必须处于工作状态,传感器的扫描时间必须为仿真系统步长时间的整数倍。举例说明,想定仿真时间步长为3 s,传感器扫描周期为6 s,第一次扫描时间为3 s,那么传感器将在3 s,9 s,15 s,21 s等时间进行扫描。如果步长周期为7 s,那么扫描时间为3 s,12 s,15 s,21 s等。

图1 传感器模型探测处理通用方法
2.3 传感器搭载平台坐标转换
(1)使用坐标系
在仿真中,传感器的坐标系使用直接关系到传感器视场(field of view,FOV)的计算以及传感器与目标视线位置的计算是否方便,考虑到计算的方便性和输入数据的方便性两个方面,使用下列坐标系:
①地心直角坐标系(earth centered erath fixed,ECEF)[14]
ECEF随地球的旋转而旋转,它以地心为原点,Z轴指向北极点,X轴和Y轴位于地球赤道平面内,X轴指向赤道与本初子午线的交点,Y轴指向赤道与90°子午线的交点,该坐标系在系统进行运算时较为方便,其他坐标系一律转换为该坐标系进行计算。
② 速度轴坐标系
速度轴坐标系以平台为原点,X轴沿平台速度矢量方向,Y轴垂直于X轴指向左侧,Z轴与X、Y轴构成右手坐标系,该坐标系能够方便地设置运动平台的属性数据。
③东-北-天坐标系(east-north-up,ENU)[15]
ENU以传感器搭载平台点(以经纬度定义)为原点,X轴指向北方向,Y轴指向东方向,Z轴延当地铅垂方向指向上。X轴和Y轴定义了ENU的地平面,ENU一般用于设置静止平台的属性数据。
一般在输入传感器搭载平台位置时,用户习惯使用速度轴坐标系和ENU进行输入,但模型在系统中参与计算时,为了简化计算过程,需要将速度轴坐标系和ENU转换为ECEF。由于速度轴坐标系使用较多,在本文中给出速度坐标系和ECEF的转换关系和转换过程,转换关系如图2所示。

图2 速度轴坐标系与ECEF转换关系
假设传感器搭载平台的瞬时的中心位于OC点,坐标系为XC-YC-ZC,ECEF原点为O,坐标系为X-Y-Z,Ψ为XC轴在平面XOY内的投影与X轴之间的夹角,Θ为XC轴与平面XOY之间的夹角,Φ为YC轴与平面XOY面之间的夹角,转换步骤如下:
步骤1 先将速度轴坐标系沿着地心矢径方向平移到地心O点。
步骤2 第一次旋转,绕ECEF的Z轴旋转Ψ角度,形成新的坐标系O-X1Y1Z1,如图2所示。
步骤3 第二次旋转,绕新的坐标系的Y 1轴旋转Θ角度,使X 2轴与XC轴重合,形成新的坐标系O-X2Y2Z2,如图2所示。
步骤4 第三次旋转,绕新坐标系X2旋转Φ角度,使得Y2轴、Z2轴分别与YC轴、ZC轴重合。至此,就完成了地心直角坐标系向速度轴坐标系的转换。
从速度坐标到ECEF 的转换矩阵为

2.4 目标适应性检查
目标适应性检查需要检测目标的作战方和目标可探测信号与传感器探测特征的对应关系,如果目标是友方或己方目标,那么不需要进行探测计算。目标可探测信号和传感器探测特征必须满足对应关系,如果不满足条件,则不能进行探测。如图3所示,图3中实线的双向箭头表示探测与被探测关系,虚线表示不仅是一种传感器探测特征类型,而且是一种被探测信号,如雷达本身是电磁发射源,同时也能够探测雷达反射信号,主动声纳本身既是声源,也可以探测声波的反射。
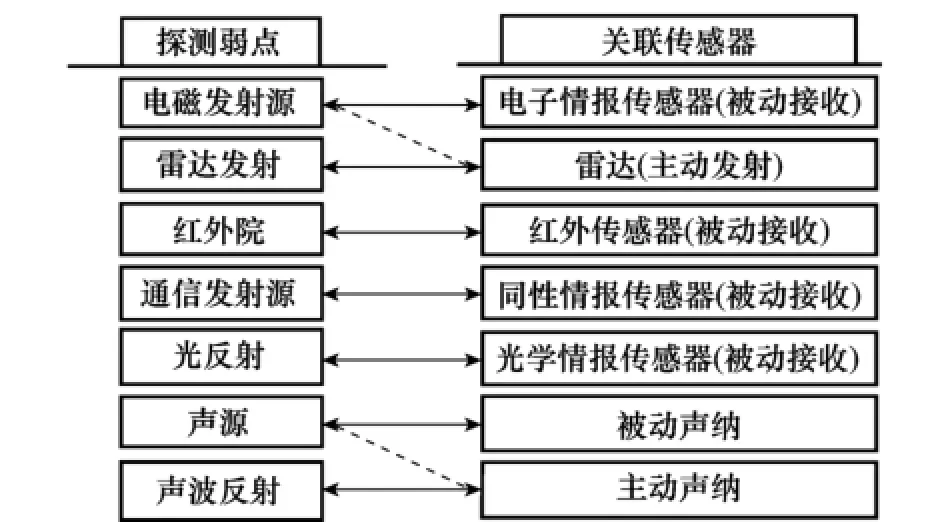
图3 目标发射信号与传感器探测特征关系
同时,还需要检查传感器和目标的距离(绝对、相对)阈值、目标速度(绝对、相对)阈值、目标高度(绝对、相对)阈值等条件,如果检查通过,则进行下一项检查。
2.5 传感器视场检查
根据传感器视场类型,将传感器视场类型设为3种,分别为矩形、圆形和无。
(1)矩形视场
如果传感器是矩形视场,需要通过俯仰角、方位角和传感器的最大探测距离这3个参数来确定目标是否处于传感器探测区域中。方位角的测量以传感器视场中心轴矢量在水平面的投影为中心,俯仰角的测量是以视场中心轴矢量在垂直平面上投影为中心,计算过程如下:
首先检测目标到传感器的距离为

式中,range为传感器到目标的距离;D为传感器在速度轴坐标系中指向目标的矢量,表示为

式中,Pt为目标在ECEF中的位置矢量;Ps为传感器在ECEF中的位置矢量。如果range计算所得值小于传感器的最大观察距离,那么目标就处在传感器的探测区域内,可以进行探测。
将传感器到目标的矢量转换为速度轴坐标系,由此计算目标的方位角和俯仰角。

式中,D={xd,yd,zd}T为ECEF传感器到目标的矢量;Ts为ECEF到速度轴坐标系的转换矩阵,如式(1)所示。假设α为目标方位角,β为目标俯仰角,计算公式为

(2)圆形视场
如果传感器视场是圆形视场,那么需要测度两个因素,一是传感器与目标的距离,另一个是传感器目标矢量与视场中心轴矢量的夹角,计算方法为

式中,α为传感器目标矢量与视场中心轴矢量之间的夹角;B为视场中心轴矢量对应的单位矢量;Ds为速度轴坐标系中的传感器目标矢量。
如果计算的角度小于传感器定义的视场角,那么通过视场检查。
(3)无
当视场类型为无时,不需要进行视场检查。
2.6 通视条件检查
通视条件检查一般检测探测目标和传感器之间是否有地形遮蔽。设置地球曲率放大倍数结合传感器的高度、位置和目标的高度、位置进行计算并与检查条件对比,如果可以通视则通过检查。一般情况,对于雷达和电子信号传感器地球曲率放大倍数通常设置为4/3,对于光学和红外传感器,一般设置为1。
2.7 特定类型传感器属性检查
不同领域的传感器,具有不同的功能和类型,针对不同类型传感器,需要检验不同的特征属性、环境、干扰因素影响检查,以雷达和声纳的主要特征属性[1618]进行比较说明。
(1)雷达
雷达传感器对外发送电磁信号,并能根据回波计算出目标的位置和速度等信息。对于在距离r的目标,雷达收到的回波信号能量计算公式为

式中,PR为雷达接收功率;PT为雷达发射功率;G=4πAe/λ2为天线增益;1/4πr2为回波的空间衰减因子;Ae为天线有效面积;σ为目标横截面面积。那么雷达探测距离方程为

式中,S为雷达接收功率PR最小值。其中,雷达接收到的目标回波能量必须大于等于S值,才有可能探测到目标。从雷达距离方程,可推导出式(9),说明了RCS值为σ0时的雷达目标距离r0与RCS值为σ1时的雷达目标距离r1的关系。

对于比较小的目标(雷达横截面非常小),其RCS值会随雷达频率在某个频段范围内发生变化而变化。假设雷达频率为f0(波长为λ0)时目标的RCS值为σ0,雷达频率为f1(波长为λ1)时,目标的RCS值为σ1,两个RCS值之间的关系非常复杂,但可以简单表示为

式中,在1 GHz≤f1≤10 GHz时e=2,否则e=0。已知雷达频率为f0时,某个小目标的RCS值为σ0,可用式(10)计算出在雷达频率为f1时,该小目标的RCS值为σ1。需要指出,雷达频率的变化只适用于RCS值比较小的情况,不应当导致RCS值增加至3~30 m2,因而,如果频率的变化导致计算出的σ1变化幅度超过了这个数值,应使用式(11)。

在雷达传感器中,需要重点检查的是信噪比参数,如果雷达接收功率过小,那么无法看到目标。同时还需要考虑大气吸收损耗、多路径传输以及地杂波和海杂波的影响计算信噪比。如果处于干扰环境中,需要信干比计算判定探测概率。
(2)声纳
以主动声纳为例进行说明,对主动声纳传感器而言,声纳方程的表现形式为

式中,Ls为目标发出的声源级;Nw为从目标到声纳接收机的传播损失;NTS为目标强度,即目标反射的声音强度;LN为声纳噪声级;AG为声纳基阵的增益,表示基阵能抑制的噪声;DT为探测阈值,用于限定探测的S/N;SE为超出的信号值,为接收到的S/N数值与必要的S/N数值间的差值;LS-2Nw+NTS代表声纳接收机能接收到的信号级;LN-AG代表声纳处理后剩下的噪声级,这5个参数共同计算出信噪比,以供声纳进行探测处理。与被动声纳方程相同,主动声纳方程中的所有参数都是随机变量(各变量互相独立,以dB为单位,都符合正态分布),主动声纳方程是各参数平均值之和。类似地可用方程式描述这些随机变量间的不同关系,从而可以确定SE的概率密度。此概率密度函数可用于计算瞬时探测概率,即密度函数曲线下SE≥0的面积。在声纳模型中,还需要考虑水位、潮流、海流、水声、噪声等环境、干扰因素对于信号传播造成的影响。
2.8 探测概率的计算
传感器的累积(多次)探测概率(cumulative probability of detection,CDP)指的是该传感器在以[t1,t2]定义的搜索时段内,至少探测到目标一次的概率。CDP的计算依赖于瞬时探测概率(假设此概率在t1与t2间的任何时刻都已知),以及针对时间[t1,t2]内发生的各单次探测间的相关性所作出合理性假设。由于CDP中包含了各单次探测间的统计上的相关性,对作战情报、搜索和监视效能具有更大影响,因而CDP比单次探测概率在作战仿真分析中具有更重要的作用。
累计探测概率考虑到输入参数配置间的关联性,假设传感器模型的单次探测概率为Pd,假设后台探测处理过程的各探测时段完全相关,但其间被一系列波动(例如突变)中断,这些波动在连续的完全相关的时段间引入了独立性。每一个完全相关的时段T是符合均值为1/λ的指数分布的随机变量,那么传感器第n次探测的累积探测概率CDP为

式中,β=1-e-λΔt;Δt为传感器探测时间间隔,并假定Pd(i)呈单峰分布,换言之,从第1次到第M次探测,Pd(i)不会降低,从第M次探测到更高,Pd(i)不再升高。
2.9 计算目标轨迹跟踪质量
采用蒙特卡罗方法对传感器的目标跟踪质量进行处理,设置跟踪模式丢失目标轨迹的概率、搜索模式的扫描间隔等参数,结合传感器自身的分辨力参数,生成对于目标的跟踪质量。
2.10 生成探测报告
根据探测的情报信息生成相应的目标报告,可以为目标位置报告、目标航线和速度的报告、目标海拔和高度的报告、目标战术ID的报告以及目标威胁等级的报告等。
3 模型输入输出数据
3.1 输入数据结构
传感器模型的输入数据结构如图4所示,主要包括两大部分:第一部分为通用传感器属性部分,包括传感器的调度计划、性能属性参数、报告属性和能够被其他类型传感器探测的属性。第二部分为指定类型传感器特殊属性部分,如针对雷达传感器,需要设置基准雷达横截面面积(radar cross section,RCS)、探测信号类型、工作媒介、基准工作频率、发射电磁波段、发射功率等参数。

图4 传感器模型输入数据
3.2 输出数据
根据传感器的输入数据模型设置传感器模型输出,包括3类输出指标,即
(1)事件发生时间;
(2)在一定时间范围发生的事件数量;
(3)在某个时间点事件的状态值。
事件发生时间类指标包括第一探测时间、第一次目标分类时间、第一次目标辨识时间等。在一定时间范围内的事件发生数量包括监视探测的事件数量、监视分类事件数量等。在某个时间点的时间状态值包括第一次探测距离、第一次目标分类距离等。
4 仿真实验验证
为了说明传感器模型通用探测处理方法的有效性和适用性,将传感器模型写入基于Agent的作战仿真系统,该系统使用平台为Windows操作系统,采用VC++语言编写,能够体现作战任务级红蓝双方战场空间实体的对抗过程并采集响应的探测、跟踪、交战结果。
设置红蓝双方对抗想定,红方战场空间实体包括1个舰队(由航母、驱逐舰、护卫舰、核潜艇组成),舰队搭载预警机中队、直升机预警中队和战斗机中队。蓝方战场空间实体包括1个舰队(由航母、巡洋舰、驱逐舰、支援舰组成),舰队搭载预警机中队、电子干扰中队和战斗机中队。红蓝双方主要使用雷达、声纳等传感器进行探测交互,通过“探测-决策 打击 评估”的流程实现海空交战,想定的高级作战概念图(operation view 1,OV-1)如图5所示。

图5 红蓝双方高级作战概念图(OV-1)
以红方单个机载雷达和蓝方舰船单个主动声纳为例,说明模型的输入参数。红方单个机载雷达基准探测距离为400 km,基准RCS为3 m2,探测包络设置为楔形,探测方位角为120°,俯仰角范围为[-60°,60°],基本工作频率设置为5 000 MHz,发射能量设置为6 k W。蓝方舰船主动声纳最大探测距离设置为15 km,最小探测距离设置为1 km,发射信号功率为100 W。传感器通过通用探测处理对目标进行交互,实现探测跟踪、分类辨识等功能。
采集的输出指标主要为探测性能指标,包括红方传感器的第一目标探测时间、第一目标探测距离、第一次目标分类时间、第一次目标辨识时间、监视探测、监视分类、监视辨识事件数量等。
以监视探测事件数量类指标为例,说明其计算方法。假设C(tq,r)是记录了r个样本数量时间间隔为[tq-1,tq](或者q=1时,时间间隔为[0,t1])内发生指定事件类型的数量。在仿真运行过程中存储的中间数据为

从式(15)的中间数据计算最终的事件数量和报告时间tq的关系,tq时刻r个运行样本评估指标的样本均值m计算公式为
tq时刻r个运行样本评估指标的样本标准差s的计算公式为

在95%置信度情况下样本均值m的样本标准方差计算公式为

想定持续时间为4 h,时间步长为30 s,使用随机数运行多个样本,运行样本数量为100次。列出部分采集指标输出结果。
第一次探测时间指标的部分输出如表1所示。

表1 第一次探测时间指标部分输出
第一次探测距离指标的部分输出如表2所示。

表2 第一次探测距离指标部分输出
红方传感器在想定的第1、2、3、4小时监视探测、分类、辨识的事件数量对比图如图6所示。图6中横坐标单位为小时,1表示从0~1小时,以此类推。纵坐标单位为个数,蓝色柱状图表示传感器监视探测事件数量均值,橙色柱状图表示传感器监视分类事件数量均值,灰色柱状图表示传感器监视辨识事件数量均值。可以看出红蓝双方在交战初期(0~1小时)内探测、分类、辨识的事件数量明显多于其他时间。

图6 红方传感器监视探测、分类、辨识事件数量
针对想定中的蓝方舰船的某一型号对空预警雷达,通过因特网公开资料搜集该雷达的数据。该雷达探测距离为370 km,探测高度为100~50 000 ft,方位角为[0°,360°],俯仰角为[-3°,5°],天线发送增益为35 d B,天线接收增益为35 dB,传输功率为37 k W,虚警概率为10-5,传输损耗为3.3 d B,脉冲宽度为4μs,信号处理损失为1.9 d B,探测目标雷达截面积为1 m2,在高脉冲重复频率近距离的情况下实际探测包络和利用该仿真模型三维剖面包络对比如图7所示。

图7 实际包括和仿真模型探测包括对比图
图7 中,红色探测包络为实际探测包络,蓝色探测包络为仿真模型包络。可以看出,在仰角为2°时,实际探测距离为32.3海里,仿真模型探测距离为32.6海里。在仰角为0°时,实际探测距离为39.5海里,仿真模型探测距离为39.6海里。实际探测包络和仿真模型包络的探测距离误差很小,平均误差小于0.5海里,可以满足仿真结果。通过实验结果,可以看出,通过通用方法可以有效实现传感器模型对于目标的探测处理,生成目标的物理情报数据和行动情报数据,对于传感器模型具有可信性、适用性和通用性。
5 结 论
本文从需求上分析了建立传感器模型探测处理通用方法的必要性,为了解决探测处理的通用性、传感器开发成本高和计算量大的问题,介绍了传感器探测通用处理方法流程,对于流程中的每部分的计算进行详细介绍,结合模型输入参数和输出数据结构,并结合作战仿真验证想定实验说明了通用传感器模型的通用性、适用性,并且降低了模型的计算量,为作战仿真中情报、监视和侦察领域的模型建模提供了较好的参考方法。
参考文献:
[1]Law A M.Simulation modeling and analysis[M].New York:The Mc Graw-Hill Companies,2007:5- 8.
[2]Huang K D,Qiu X G.The technology of modeling and simulation[M].Changsha:National University of Defense Technology Press,2010:1- 6.(黄柯棣,邱晓刚.建模与仿真技术[M].长沙:国防科技大学出版社,2010:1- 6.)
[3]Hu X F,Luo P.Themodeling and simulation complex warfare system[M].Beijing:National Defense University Press,2005:9-30.(胡晓峰,罗批.战争复杂系统建模与仿真[M].北京:国防大学出版社,2005:9- 30.)
[4]Brehmer B.The dynamic OODA loop:amalgamating boyd’s OODA loop and the cybernetic to command and control[C]∥Proc.of the 10th International Command and Control Research and Technology Symposium,2006:1- 5.
[5]Collins R T,Lipton A J.Algorithms for cooperative multi-sensor surveillance[J].Proceedings of the IEEE,2001,89(10):1456- 1477.
[6]Adamy D L.Introduction to electronic warfare modeling and simulation[M].Boston:SciTech Publishing,2006:56- 70.
[7]Lim E W C.Discrete event simulations-development and applications[M].Rijeka:Intech,2012:63- 73.
[8]Menthe L,Sullivan J.A rand analysis tool for intelligence,surveillance and reconnaissance-the collections operations model[R].USA:Rand Cooperation,2008:1- 36.
[9]Leachtenauer J C,Driggers R G.Surveillanceand reconnaissance imaging systems:modeling and performance prediction[M].Norwood:Artech House,2001:34- 54.
[10]Mao S J,Ju Z Q.C4ISRsystem simulation experiment technology[M].Beijing:Military Science Press,2007:87- 141.(毛少杰,居真奇.C4ISR系统仿真实验技术[M].北京:军事科学出版社,2011:87- 141.)
[11]Yang C Z.Electronic countermeasures warfare simulation[M].Beijing:Blue Sky Press,2004:24- 46.(杨承志.电子对抗作战仿真[M].北京:蓝天出版社,2004:24- 46.)
[12]Xu R M.The warfare modeling and simulation[M].Beijing:Military Science Press,2012:220- 240.(许瑞明.作战建模与仿真[M].北京:军事科学出版社,2012:220- 240.)
[13]Lei L,Shi X.Surveillance and reconnaissance[M].Beijing:National Defense Industry,2008:12- 20.(雷厉,石星.侦察与监视-作战空间的千里眼和顺风耳[M].北京:国防工业出版社,2008:12- 20.)
[14]Cui Y Q,Wei X,You H,et al.Mobile sensor registration in ECEF coordinates using the MLR algorithm[C]∥Proc.of the IEEE Chinese Institute of Electrics International Conference on Radar,2011:1784- 1787.
[15]Arnold C N,Barnes M J,Berger M,et al.ENU-induced phenovariance in mice:inferences from 587 mutations[J].Bio Med Central Research Notes,2012,5(1):1- 14.
[16]Chen Y G,Li X H.The capability analysis and evaluation of radar network[M].Beijing:National Defense Press,2006:43-76.(陈永光,李修和.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006:43- 76.)
[17]Klaus H,Oscar K.Design and analysis of experiments,special designs and applications[M].Hoboken:Wiley,2012:121- 140.
[18]Anghinolfi D,Capogrosso A,Paolucci M,et al.An agentbased simulator for the evaluation of the measurement of effectiveness in the military naval tasks[C]∥Proc.of the 17th IEEE International Conference on System Theory,Control and Computing,2013:733- 738.
General method of sensor model detection processing of warfare modeling and simulation
LI Yuan-feng1,3,LIU Jian-ping2,SHI Cheng-ying1,WANG Wei3
(1.The 103 Department,The Second Artillery Engineering University,Xi’an 710025,China;2.Unit 61683 of the PLA,Beijing 100094,China,3.The 906 Department,The Second Artillery Engineering University,Xi’an 710025,China)
The model of command,control,communication,computer,intelligence,surveillance and reconnaissance(C4ISR)is the soul of warfare simulation system,and it is also the key and difficulty in warfare simulation.On the basis of analyzed the ISR sensor model of warfare modeling and simulation model for detection process modeling requirements,a general method for detecting of sensor model is proposed,and the overall flow of the method is introduced.The calculating process of the nine aspects of the methodology is described in detail.The input and output data binding model structure is described.Combined with the simulation experiments,the applicability and versatility of proposed method to improve the operating efficiency of the model are illustrated.The development costs are saved and a reference model for the ISR modeling and simulation is provided.
warfare simulation;sensor model;detection process;general method
A
10.3969/j.issn.1001-506X.2015.04.13
李元锋(1982 ),男,工程师,博士研究生,主要研究方向为作战仿真。E-mail:jonasdhb@163.com
刘建平(1966 ),男,高级工程师,博士,主要研究方向为作战仿真、系统工程。E-mail:ljp123@163.com
石成英(1964-),男,教授,博士,主要研究方向为系统工程。E-mail:sunyinchao523@163.com
王 伟(1990-),男,硕士研究生,主要研究方向为作战仿真。E-mail:125886950@qq.com
1001-506X(2015)04-0802-07
2014- 04- 07;
2014- 07- 01;网络优先出版日期:2014- 10- 22。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141022.1325.005.html
国家自然科学基金(91024030)资助课题
