智能车赛道类型判断方法研究
2015-05-30乔卫磊夏玉洁王易凤陈怀安
乔卫磊 夏玉洁 王易凤 陈怀安
【摘要】 以全国大学生飞思卡尔智能车竞赛为背景,介绍了智能车在赛道类型判断上常用的三种算法。通过对智能车赛道中心线建立模型,可以提取出赛道的特征信息。利用特征信息就可以对小车的舵机和速度施行控制,使之达到较为准确的转弯和快速行驶的性能。
【关键词】 智能车 赛道识别 类型判断
智能车系统以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科,它主要由路径识别、角度控制及车速控制等功能模块组成。竞赛摄像头组的技术要点中,图像处理和赛道识别这两个环节尤其重要,其影响到小车的最终控制。由于赛事的难度系数越来越大,赛道类型的准确判断也成为了一大难题。本文介绍了三种比较成熟的赛道类型判断方法。
一、两点求赛道曲率[1]
如图1所示,设智能车处于赛道中线AB上的A点处,前进方向为赛道中心线的切线方向。在赛道中心线圆弧段的半径最小值的范围内取长度L(AB),在A点正前方(纵向)距A点L(AB)距离的B点横向读取赛道中心线上C点之间的信息,测出B点和C 点之间的长度为L(BC),AC的中点为D点,赛道中心线圆弧段所在圆的圆心为O点,设此时智能车所处的赛道曲率为k,曲率半径为R。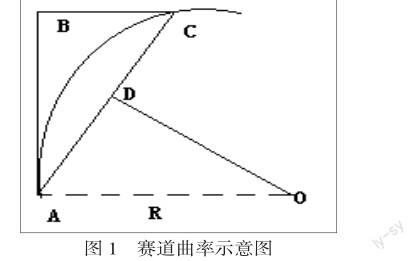
由于AB是赛道中心线所在圆弧段的切线,所以AB与AO垂直,AC为圆上的弦D为AC的中点,由ΔABC与ΔODA 相似,可得:
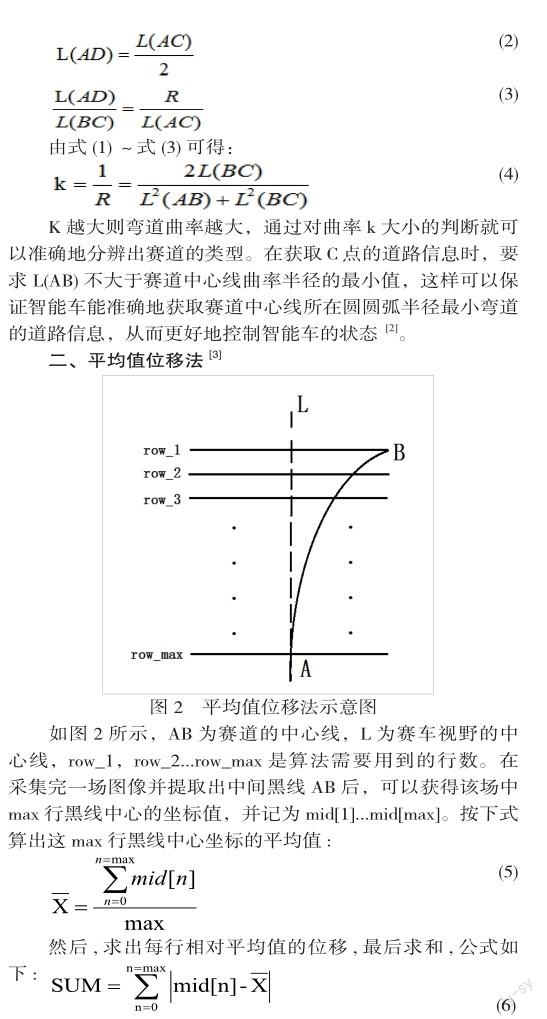
由于SUM越大说明跑道弯曲程度越大, 因此给定SUM一个合适的阈值, 就可以正确识别出跑道当前的弯道程度。实验表明, 只要阈值取得合适,该算法非常可靠。其中,阈值还可以根据跑道的改变作相应的调整。
三、赛道斜率判断法
智能车比赛的赛道是由两条黑色的边线构成的,在提取出这两条边线计算出赛道中心线之后,可以通过测量道路的斜率和车子与道路的偏移来计算偏差,偏移的正负也代表了车子偏向于哪一边。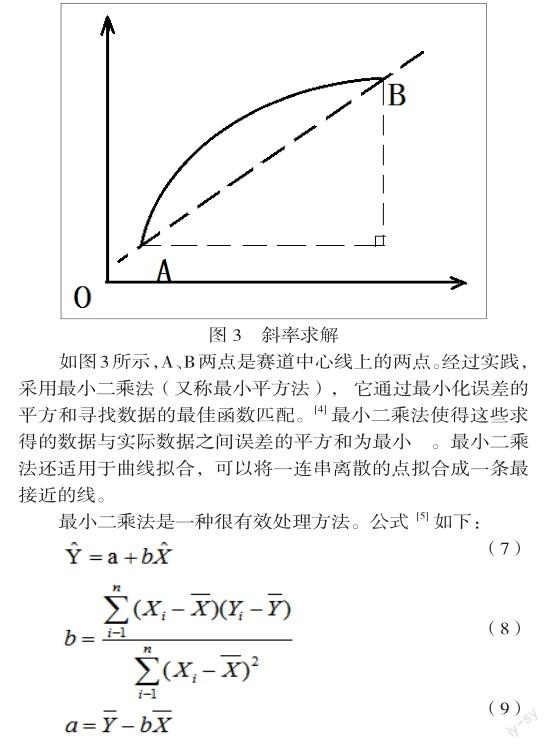
式中的b就是AB两点的斜率。斜率有正负之分,当斜率大于0时,说明为右弯道。同理,当斜率小于0时,为左弯道。若对b取绝对值,则|b|表示弯道的弯曲程度,|b|越大则弯道越弯曲。
四、结论
本文介绍的三种赛道类型判断方法在实际中均得到了广泛的应用。每种方法都有其各自优缺点:两点求赛道曲率法能够非常准确地判断出赛道类型,但是算法复杂,运算量大,计算时间时长,不利于智能车的快速反应;平均值位移法算法简介明了,计算量小,但是在复杂的赛道判断时,误差较大,有时会出现错判;斜率判断法,运算量介于上述两种方法之间,计算也较为简单,判断正确率较高。
在智能车的制作过程中,要实现准确的控制,赛道类型的判断是极为重要的一步。只有经过不断的试验和调整才能够选出最适合的判断方法,从而达到使智能车进行快速反应、精确控制和稳定运行的目的。
参 考 文 献
[1] 蒋 旭,吴 涛.两点算法求智能车赛道曲率.新技术新工,2014,04.
[2] 刘进,齐晓慧,李永科.智能车大角度弯道转向曲率连续的轨迹规划方法.中国机械工程,2014.02.026
[3] 许 寰,鲁五一,赵治平.摄像头路径识别和小车控制策略.计算机工程与科学,2009,31(5):110-115.
[4] 刘嘉豪,刘海刚,张建伟,关天.智能车图像处理与识别算法研.工业控制计算,2014,08.
[5] 贾小勇,徐传胜,白欣.最小二乘法的创立及其思想方法,西北大学学报(自然科学版),2006,06.