智能车赛道滤波算法研究
2015-05-30乔卫磊陈怀安杨元杰
乔卫磊 陈怀安 杨元杰
【摘要】 以全国大学生飞思卡尔智能车竞赛为背景,介绍了智能车赛道滤波常用的三种算法。智能车摄像头采集的图像如果不经处理会有较多噪点,影响智能车判断的准确性。这些噪点主要是高斯噪点和椒盐噪点,通过适当的滤波可以有效地滤除这些噪点。
【关键词】 智能车 赛道滤波 滤波算法
在智能车比赛中,摄像头组肯定会遇到的问题就是采集过的图像有很多噪点,尤其是数字摄像头。当小车快速行驶时,图像中的噪点如果不经过处理就会对小车的行驶造成很大的影响。本文提出的这三种方法可以有效地解决图像噪点问题。
一、邻域均值滤波
(1)式中:Zi是以为(x, y)中心的邻域像素值;wi是对每个邻域像素的加权系数或模板系数;mn是加权系数的个数或称为模板大小。均值滤波处理效果如图1所示。
由以上处理后的图像可以看到:邻域平均法适于消除图像中的颗粒噪声,但需要指出这种方法既平滑了图像信号,同时使图像的细节部分变得模糊[2]。
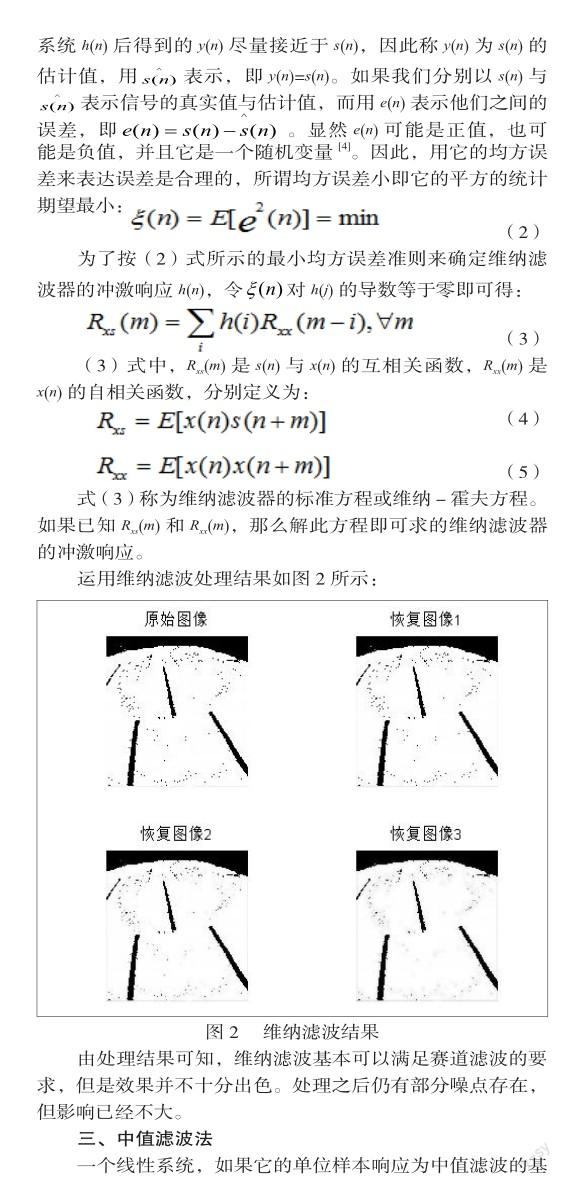
二、维纳滤波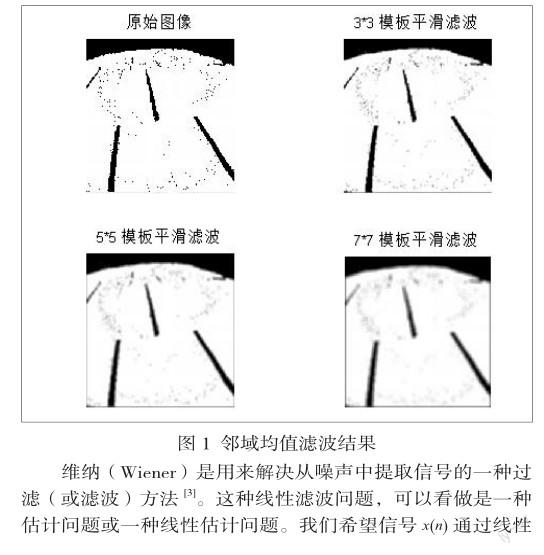
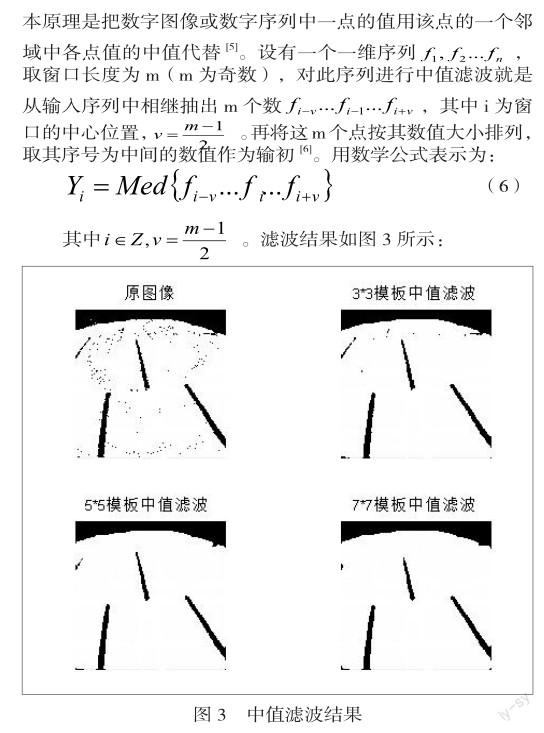
通过结果我们可以看到中值滤波对于滤除赛道图像的“椒盐”噪声非常有效,它可以做到既去除噪声又能保护图像的边缘,从而获得非常满意的复原效果。
四、结论
上文介绍的三种算法均可应用于智能车赛道滤波。每种算法都有其各自的特点。邻域均值滤波算法能有效抑制加性噪声,但容易引起图像模糊,可以对其进行改进,避开对赛道边缘的平滑处理。维纳滤波算法可以使原始图像和其恢复图像之间的均方误差最小,是一种自适应滤波器,根据局部方差来调整滤波器效果,对于去除高斯噪声效果明显。中值滤波算法的特点是首先确定一个以某个像素为中心点的邻域,然后将邻域中各像素的灰度值排序,取其中间值作为中心像素灰度的新值。利用中值滤波可以对圖像进行平滑处理。其算法简单,时间复杂度低,很容易自适应化,非常适合智能车赛道的滤波。综上所述,在三种算法中,中值滤波算法对赛道噪点的滤波效果最好。
参 考 文 献
[1]张晋.图像工程(第二版).北京:清华大学出版社,2007 .
[2]宋兆基、徐流美等.MATLAB 6.5在科学计算中的应用.北京:清华大学出版社,2005.
[3]胡鹏,徐会燕.基于matlab的图像去噪算法的研究与实现.《福建电脑》,2009(12) .
[4]孙宏琦,施维颖,巨永峰.利用中值滤波进行图像处理.《长安大学学报(自然科学版)》,2003(2) .
[5]张天瑜.基于改进型中值滤波算法的图像去噪.长春工业大学学报,2009,30(1):48~52.
[6]贾洪涛,朱元昌,王建华.扩展自适应中值滤波器的原理与实现.中国图象图形学报,2004,9(8):947~958.
