面向学习者的机器人避障案例教学设计
2015-05-30陈杨林


摘要:本文对2012年全国大学生数学建模竞赛D题进行了改
编,并从实际情况出发进行图形数据处理、模型建立、模型求解。
关键词:最短路径 matlab 线圆模型 动态规划
1 机器人避障问题转化为数学问题
2012年全国大学生数学建模竞赛D题为一道机器人避障问题,即要求机器人在给定区域内成功绕过障碍物并到达目标点。这道题目考查了大学生的综合分析能力和解决问题的能力,要求其灵活运用数学知识解决现实生活中的具体问题。本文试图通过建立数学模型的方式分析和解决这一问题。首先,我们先设计一张平面场景示意图,规定其为机器人的限定活动区域。其中,场景图的规格为800×800,设机器人的起点为原点,即(0,0)。假设我们在12个形状不同的区域内设置了障碍物。机器人在活动时不得与障碍物发生碰撞,否则将无法正常行走。为进一步明确机器人的行走状况和障碍物的分布特征,我们制作了表格。(表1)
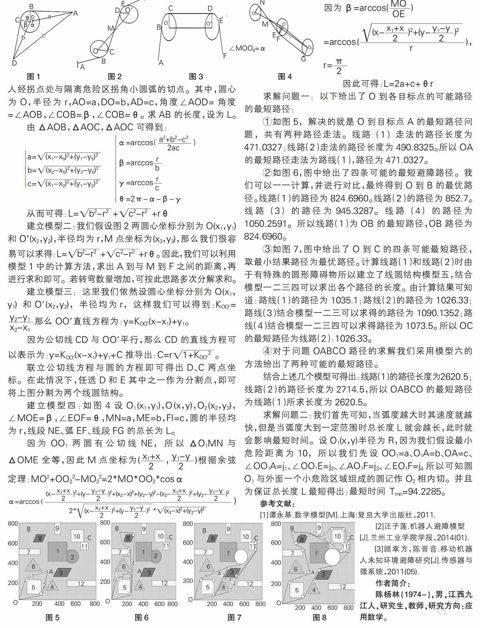
求解问题一:以下给出了O到各目标点的可能路径的最短路径:
①如图5,解决的就是O到目标点A的最短路径问题,共有两种路径走法。线路(1)走法的路径长度为471.0327;线路(2)走法的路径长度为490.8325。所以OA的最短路径走法为路线(1),路径为471.0327。
②如图6,图中给出了四条可能的最短避障路径。我们可以一一计算,并进行对比,最终得到O到B的最优路径。线路(1)的路径为824.6960。线路(2)的路径为852.7。线路(3)的路径为945.3287。线路(4)的路径为1050.2591。所以线路(1)为OB的最短路径,OB路径为824.6960。
③如图7,图中给出了O到C的四条可能最短路径,取最小结果路径为最优路径。计算线路(1)和线路(2)时由于有特殊的圆形障碍物所以建立了线圆结构模型五,结合模型一二三四可以求出各个路径的长度。由计算结果可知道:路线(1)的路径为1035.1;路线(2)的路径为1026.33;路线(3)结合模型一二三可以求得的路径为1090.1352;路线(4)结合模型一二三四可以求得路径为1073.5。所以OC的最短路径为线路(2):1026.33。
④对于问题OABCO路径的求解我们采用模型六的方法给出了两种可能的最短路径。
结合上述几个模型可得出:线路(1)的路径长度为2620.5;线路(2)的路径长度为2714.5,所以OABCO的最短路径为线路(1)所求长度为2620.5。
求解问题二:我们首先可知,当弧度越大时其速度就越快,但是当弧度大到一定范围时总长度L就会越长,此时就会影响最短时间。设O1(x,y)半径为R,因为我们假设最小危险距离为10,所以我们先设OO1=a、O1A=b、OA=c、∠OO1A=j1、∠OO1E=j2、∠AO1F=j3、∠EO1F=j4所以可知圆O1与外面一个小危险区域组成的圆记作O2相内切。并且为保证总长度L最短得出:最短时间 Tmin=94.2285。
参考文献:
[1]谭永基.数学模型[M].上海:复旦大学出版社,2011.
[2]汪子莲.机器人避障模型 [J].兰州工业学院学报,2014(01).
[3]顾幸方,陈晋音.移动机器人未知环境避障研究[J].传感器与微系统,2011(05).
作者简介:
陈杨林(1974-),男,江西九江人,研究生,教师,研究方向:应用数学。
