基于ZigBee的博物馆监测系统设计
2015-05-30林凯宏罗梓杰等
林凯宏 罗梓杰等


摘 要:针对目前国内博物馆的物联网技术尚不普及,无法实现智能博物馆的现状,文章提出了一套基于ZigBee的博物馆监测系统,该系统由节点部分和终端处理部分结合ZigBee无线通信技术组成,可对馆内环境参数变化和人员流动变化进行实时监测,既减轻工作人员的工作强度,又减少了人力成本支出,可实现现代博物馆的人性化监测和智能化管理。
关键词:ZigBee;博物馆;监测系统
引言
博物馆在文物的宣传,研究,收藏和文化遗产的保护中发挥着重要作用。如何有效地监控馆内游客分布位置,控制馆内参观人数及监测内部环境参数变化,以确保馆藏展品安全,成为博物馆亟需解决的问题,然而在国内尚少见到有关解决方案[1],因此文章提出一种基于ZigBee博物馆监测系统的解决思路。
1 系统整体框架
基于ZigBee的博物馆监测系统,由节点部分和终端处理部分组成:节点部分包括:ZigBee节点(下位机)、ZigBee协调器和智能手环。终端处理部分包括:监控软件(上位机)、监控端PC机、后台数据库、加密软件和身份证识别仪。系统结构拓扑图如图1所示。
图1 系统结构拓扑图
2 节点部分设计
2.1 ZigBee节点(下位机)
ZigBee节点(下位机)包括ZigBee无线射频模块、语音芯片、光敏传感器、温湿度传感器、烟雾传感器、噪声检测单元、工作状态指示灯、查询模块[2]。每个下位机具有标识其所处位置的地区编码,可视为锚节点。
2.2 ZigBee协调器
ZigBee协调器用于构建ZigBee无线网络,实现下位机与网内监控端PC机通讯,当ZigBee协调器借助网关协议连接至Internet,则Internet中的上位机可以与ZigBee网络中任意一台下位机进行通讯。
2.3 智能手环
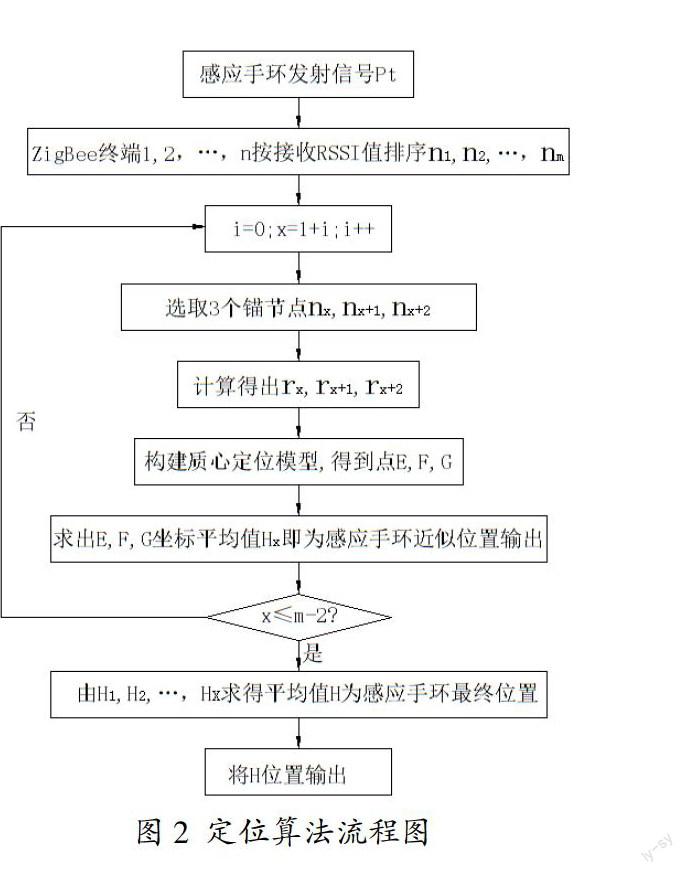
智能手环作为一个移动节点,其环体由ZigBee射频芯片、电源、LED指示灯及紧急呼叫按钮构成;可主动向下位机发送信号;上位机将未确定位置的智能手环视为未知节点,并通过RSSI测距算法及质心定位模型确定位置[3],具体步骤如下:
步骤一:在未知节点发射功率的情况下,锚节点根据接收到的接收功率,计算出信号的传播损耗,再通过RSSI测距算法将传播损耗转换为距离,在自由空间中距离发射r处的锚节点接收到的信号强度由以下公式给出:
Pr(r)=(1-ζ)Ptλ2/(4π)2r2L
其中Pt为未知节点发射RSSI信号功率(单位:w);Pr(r)为距离r处的锚节点接收信号功率(单位:w);ζ是信号衰弱指数,其大小取决于传播环境;r是距离(单位:m);L是与传播无关的系统损耗因子;λ是波长(单位:m)。
已知接收RSSI的值,则利用以下公式即可计算收发节点之间的距离r:
r=■
将能够收到某一未知节点发射的RSSI值的若干锚节点n1、n2、…、nm按照RSSI值从大到小排序,则相对应收发节点之间的距离为r1、r2、…、rm。
步骤二:选取锚节点n1、n2、n3用于建立质心定位模型:根据RSSI测距算法得到该未知节点到3个被选取的锚节点的距离r1、r2、r3,则此未知节点位于以被选取的任一锚节点为球心,以距离ri(i表示排序的第i个节点信号)为半径的球上;为减少处理量,此处以二维平面圆代替球。
设3个锚节点的坐标分别为A(xa,ya),B(xb,yb),C(xc,yc),未知节点的坐标为(xi,yi),以A,B,C为圆心,依次以r1,r2,r3为半径画圆,可得到3个圆的交叠区域,并且该区域的边界弧线分别两两相交于E(x1,y1),F(x2,y2),G(x3,y3),则有:
求得E、F、G三点的坐标值,则未知节点D的坐标为E、F、G三点坐标的平均值H,即:
步骤三:为减小误差,重复步骤二x次。
步骤四:将步骤三每次所得位置区域进行重叠,并将重叠次数最多的点或者面判断为该时间段内未知节点最终瞬时位置。
步骤五:将该未知节点的瞬时位置在监控软件构建的虚拟立体建筑进行标识。
智能手环定位算法流程如图2所示,质心定位模型如图3所示。
3 终端处理部分
3.1 监控软件
监控软件(上位机)可对ZigBee协调器传输过来的数据进行分析处理,并通过ZigBee协调器给予各节点反馈命令,同时发给后台数据库进行存档备案;上位机的图形用户界面(GUI)负责与用户进行人机交互。监控软件作为操作平台,具备三维立体空间模拟、显示各个下位机节点位置和状态、节点数据处理、历史数据浏览、节点开关等功能。
3.2 其他软硬件部分
监控端PC机是人对全部下位机进行监控、管理的硬件平台,监控软件运行在此平台上。而后台数据库采用MySQL搭建,用于接收和存储游客身份证号码和对应智能手环特征码,以及对上位机的有效数据进行存档备案。
加密软件采用多线程抽取算法模拟随机抽数:运行时程序多线程进行并行抽取,并将抽取出来的若干数值采用MD5算法生成对应特征码。
4 系统工作整体流程
下位机将记录该特定场合的正常环境参数并实时检测,若超出预读取的阀值所允许范围,则用人性化语音进行提示。传感器实时检测外部环境中的信息数据后,由下位机上的无线射频模块对数据进行组帧、帧校验、加密、发送的处理,再汇聚到ZigBee协调器。
ZigBee协调器在接收完下位机处理过的数据后,再将数据转发至上位机。操作人员在上位机上可以看到下位机的状态及所在位置的环境信息,同时通过GUI发送控制指令给下位机,从而实现人机交互功能。
当游客进入博物馆时,工作人员借助身份证识别仪提取游客的身份证号码,通过加密软件生成的特征码和若干个智能手环进行对应,同时发送给后台数据库,上位机记录该智能手环的特征码以及对应身份证号码,完成智能手环特征码的固化和个人信息备案。手环固化后开始工作并发放给参观的游客,在消除特征码后停止工作。
根据每个智能手环的特征值,并配合后台数据库和下位机内置的查询模块可快速查找某身份证对应的智能手环位置,并在监控软件构建的虚拟立体建筑进行标识显示。当游客遇到紧急情况时,可按下智能手环上的紧急呼叫按钮,智能手环会主动向下位机发射求助信息并传递给上位机。上位机操作人员在接收到请求后可调出该智能手环所在位置,并联系该区域附近的工作人员帮助该游客。前台PC机操作人员可根据监控软件监测到的智能手环数判断是否放入下一批游客,更好地调控参观人数。博物馆出口处设有一个下位机,以检测离开游客身上是否携带有智能手环,从而回收智能手环。
5 结束语
本设计在研究和总结国内外基于物联网的监测管理平台的基础上,结合无线传感器网络的特点,设计了基于ZigBee的博物馆监测系统。通过该平台对馆内环境参数变化和人员流动变化进行实时监测,提高现代博物馆的人性化监测和智能化管理水平。
参考文献
[1]周迪,姚燕,徐德龙,等.文物安防系统[J].中国新通信,2013(2):7-9.
[2]王长清,岳新伟.基于ZigBee技术的博物馆藏品微环境检测保护系统设计与实现[J].河南師范大学学报(自然科学版),2012,40(3):34-37.
[3]张庆华,施伟斌.基于ZigBee技术的博物馆内人员定位系统的研究[J].光学仪器,2012,34(1):81-84.
作者简介:林凯宏,广东技术师范学院。
