基于有限元法的挤奶机械臂ANSYS仿真
2015-05-30刘俊杰等
刘俊杰等


摘要:为保证挤奶机器人满足设计要求,利用有限元分析软件ANSYS对不锈钢支架及机械臂的强度和刚度进行静力学分析,并对不锈钢支架的结构进行模态分析。结果表明:仿真结果显示机械臂的强度和刚度能够满足设计要求,进而为合理设计挤奶机器人机械结构提供有力保证。
关键词:农业机械;挤奶机器人;机械臂;有限元法;仿真;ANSYS
中图分类号:S818.5;S823 文献标识码:A 文章编号:1674-1161(2015)06-0025-04
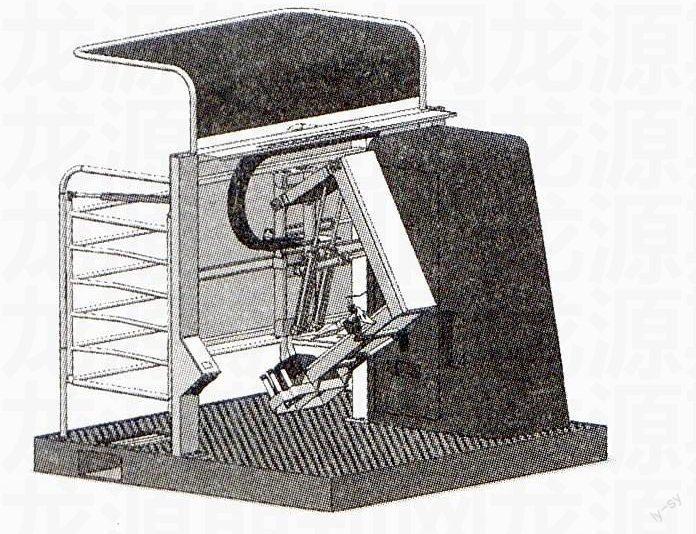
挤奶自动化程度高低已成为衡量现代规模化奶牛场发展水平的重要考量指标。国内全自动挤奶设备的设计生产水平较国外有很大差距。本研究充分吸收国外先进技术,并以中国荷斯坦奶牛的体高、体长、体宽、乳房位置和乳头分布等体貌特征作为挤奶机械臂的设计依据,设计出满足国内奶牛体征的自动化挤奶机器人(如图1所示)。
该挤奶机器人的运动主要是靠机械臂的整体横移及伸展收缩来实现的。这几个自由度的运动会产生多方向的运动载荷,并产生对机组系统的多路随机激励作用。当机械臂在气缸驱动下处于提升状态时,机械臂自身质量及托盘质量就会以力载荷的形式作用于机械臂自身及横移支架上,机械臂在横移运动过程中会对滑道产生作用载荷。
要保证机械结构的正常安全工作,必须满足设计要求的强度和刚度性能。为此,本研究利用有限元分析软件ANSYS,对挤奶机器人关键部件进行结构强度校核,进而为合理设计其机械结构提供有力保证。
1 机械臂有限元静力学分析
在工作状态和非工作状态下,挤奶机器人的受力状态不同,需要对两种状态下的装备进行有限元分析。
1.1 不锈钢支架结构有限元静力分析
通过有限元分析软件ANSYS对不锈钢支架进行静力学分析,查看其受力状态和应力分布,确定其最大应力。有限元分析的步骤主要包括前处理、求解计算和后处理。前处理过程包括创建模型或由外部三维软件建模后导入,定义材料属性和划分网格等前期工作;求解计算环节主要是确定分析类型、施加载荷和约束等步骤;后处理过程设定求解(结果)参数,观察求解结果。具体过程如下。
1) 利用Solidworks三维建模软件完成装配体模型后,通过ANSYS软件与Solidworks接口,将待分析结构的SW文件导入ANSYS中。
2) 给模型添加材料、网格划分、施加边界条件(约束)、施加载荷。不锈钢支架材料选用0Cr18Ni9钢材,其材料属性见表1。为了计算方便,使载荷在支架滑轨接触处平均分布,加载1 500 N的载荷,连接的6个螺栓分别加载250 N的载荷。支架悬臂梁的体积较大,不能忽略重力的影响,施加重力载荷(Standard Earth Gravity)。悬臂梁基座施加固定约束(Fixed Support),在基座的4个螺栓孔内施加圆柱面约束(Cylindrical Support)。
3) 后处理求解。对不锈钢支架进行静态结构分析,对施加载荷和约束之后的悬臂梁进行求解,通过求解查看结构的变形情况和应力分布情况,求解得到应力和位移云图(如图2所示)。
由图2可知:在气压缸支撑机械臂升起后,支架悬臂梁承受载荷最大应力出现在滑轨约束位置处,最大应力为15.571 MPa;最大位移形变在支架悬臂梁与机械臂的滑道接触处,最大形变为0.721 mm。此时,悬臂梁的最大应力在安全范围内,说明悬臂梁机构设计合理,强度符合设计要求。
1.2 机械臂装配体整体有限元分析
挤奶机器人的主要运动是机械臂的横移运动和气压缸支撑的伸展与收缩运动,而横移支架是连接梁架结构与横移机构的中间连接体,其工作性能的安全性非常重要,因此,在对横移时的整体做有限元分析时,采用分析装配体模型方式,以保证分析的正确性。
在Solidworks三维建模软件完成装配体模型后,将模型导入ANSYS软件中。前处理环节添加材料属性、网格划分后,还需要定义装配体之间的接触。整体材料选用0Cr18Ni9,其材料属性已知。网格划分尺寸为10 mm,对零件关键部位加密网格(Refine)。选用固结(Bonded)接触类型,接触方式为非对称(Asymmetric)。
对装配体模型进行有限元静力学分析,求解得出装配体在机械臂最高位置、水平位置、最低位置的位移形变云图和应力云图(如图3所示)。
由图3可知:3种工作位置下的位移形变最大量均出现在托盘端部,最大位移形变分别为1.620 mm,1.780 mm,2.080 mm,对整个装配体的工作性能无影响;对于整个装配体来说,悬臂梁架受载均匀对称,应力值分布左右对称,最大应力值分别为70.060 MPa,54.510 MPa,65.640 MPa,出现在气压缸与机械臂连接的位置。此区域出现应力集中,与实际受载分布相符。
不锈钢支架采用的材料为Q345,其许用应力[σ]=137.000 MPa,由此可得出其安全系数:
n=[σ]/σ=137.000/65.640=2.09>2.00
由于受载荷装配体的安全系数大于装配体结构的安全系数,故认为是安全的,即整个机械臂结构和横移支架的装配体是安全的。
2 不锈钢支架结构的模态分析
挤奶机器人装备的机械臂依靠2组气压缸的支撑进行伸展与收缩运动,依靠1组气压缸的驱动进行横移运动,来完成机器人的挤奶工作。支架结构除了支撑机械臂机构全部质量外,还要承受来自气压缸驱动而导致的载荷外力作用。
支架结构是支撑整套装备的重要组成部分,其性能直接关系到装备的安全作业。机械臂结构在由气压缸支撑进行的伸展与收缩过程中一直受动载荷作用,挤奶工作也会使机械臂机构在移动过程中受到外载荷作用。挤奶工作状态还存在横移运动调整。根据不同的工作环境,横移运动会有不同的横移频率和横移阻力。
这些冲击动载荷通过各部件的相互连接传递到支架与机械臂结构的各个部分,从而引起挤奶设备整体及部分的动态响应。有必要对装配体结构做模态分析,得出装配体结构的固有频率及振型等,以避免外力频率和结构频率相同或相近而发生共振。装配体结构模态分析结果如图4所示。
由图4可知:一阶和二阶模态的最大振动频率分别为10.391 Hz和11.597 Hz。在挤奶机器人驱动系统气压缸选型及行程、速度设定工作中,要考虑装配体的振动频率,防止发生共振现象,以最大限度地提高机器使用寿命及工作稳定性。
3 结论
为了使挤奶机器人能够满足设计要求,本研究利用有限元分析软件ANSYS,对不锈钢支架及机械臂强度与刚度进行了静力学分析,对不锈钢支架结构进行了模态分析,分析结果表明:1) 当气压缸支撑机械臂升起后,支架悬臂梁承受载荷最大应力出现在滑轨约束位置处,最大应力为15.571 MPa;最大位移形变在支架悬臂梁与机械臂的滑道接触处,最大形变为0.721 mm。此时,悬臂梁的最大应力在安全范围内,这说明悬臂梁机构设计合理,强度符合设计要求。2) 机械臂总装配在3种工作位置下位移形变最大量均出现在托盘端部,最大位移形变分别为1.620 mm,1.780 mm,2.080 mm,对整个装配体的工作性能无影响;对于整个装配体来说,悬臂梁架受载均匀对称,应力值分布左右对称,最大应力值分别为70.060 MPa,54.510 MPa,65.640 MPa,出现在气压缸与机械臂连接的位置。此区域出现应力集中,这与实际受载分布相符。整个机械臂结构和横移支架装配体安全系数为2.09,属于安全值范围。3) 不锈钢支架模态频率显示,一阶和二阶模态的最大振动频率分别为10.391 Hz和11.597 Hz。在挤奶机器人驱动系统气压缸选型及行程、速度设定工作中,要考虑装配体的振动频率,防止发生共振现象,以最大限度地提高机器使用寿命及工作稳定性。
仿真结果显示:机械臂的强度和刚度能够满足设计要求,进而为合理设计挤奶机器人机械结构提供了有力保证。
参考文献
[1] 张会娟,志超,吴峰,等.我国奶牛挤奶设备概况与发展[J].农机化研究,2008(5):236-239.
[2] 颜志辉,王加启,卜登攀,等.挤奶机器人在奶牛场中的应用[J].中国奶牛,2008(4):52-53.
[3] 冯瑞章,张文斌.高产奶牛的体貌特征[J].中国畜牧兽医,2008(9):151-153.
[4] 袁军,王景立.基于Pro/E与ANSYS Workbench的深松铲结构分析及优化[J].中国农机化,2012(5):77-79.
Simulation of Milking Robot Arm ANSYS based on Finite Element Method
LIU Junjie1, YANG Shenghu2, CHENG Rui1, ZHAO Yi1
(1. Heilongjiang Institute of Agricultural Mechanical Engineering Science, Harbin 150081, China; 2. Harbin Engineering University, Harbin 150001, China)
Abstract: In order to meet the design requirements of milking robot, it used finite element ANSYS software to do static analysis on the strength and stiffness of stainless steel bracket and robot arm, and do modal analysis on the structure of stainless steel bracket. The result shows that the strength and stiffness of robot arm can meet the requirements of the design; it provided a guarantee for reasonable design for mechanical structure of milking robot.
Key words: agricultural machinery; milking robot; robot arm; finite element method; simulation; ANSYS
