坐标系在三坐标中的应用
2015-05-30王秀伟
王秀伟
摘要:本文主要讲述了笛卡尔坐标系的意义,以及在工件测量过程中坐标系的重要性,和建立坐标系的方法。
关键词:坐标系 ;笛卡尔; 三坐标; 基准
引言
三坐标测量机是测量和获得尺寸数据的最有效的方法之一,因为它可以代替多种表面测量工具及昂贵的组合量规,并把复杂的测量任务所需时间从小时减到分钟,坐标系的建立使得工件测量准确高效,在工件坐标系上编制的测量程序可以重复运行而不受零件摆放位置的影响。以下我会分别以笛卡尔坐标系的定义,建立坐标系的方法以及坐标系的作用来分析阐述坐标系在三坐标中的应用。
1.定义
笛卡尔坐标系就是直角坐标系和斜角坐标系的统称。相交于原点的两条数轴,构成了平面仿射坐标系。如两条数轴上的度量单位相等,则称此仿射坐标系为笛卡尔坐标系。两条数轴互相垂直的笛卡尔坐标系,称为笛卡尔直角坐标系,否则称为笛卡尔斜角坐标系。
为了沟通空间图形与数的研究,我们需要建立空间的点与有序数组之间的联系,为此我们通过引进空间直角坐标系来实现。 过定点O,作三条互相垂直的数轴,它们都以O为原点且一般具有相同的长度单位.这三条轴分别叫做x轴(横轴)、y轴(纵轴)、z轴(竖轴);统称坐标轴.通常把x轴和y轴配置在水平面上,而z轴则是铅垂线。
1.1 右手定则
在三维坐标系中,Z轴的正轴方向是根据右手定则确定的。右手定则也决定三维空间中任一坐标轴的正旋转方向。
要标注X、Y和Z轴的正轴方向,就将右手背对着三坐标测量机放置,拇指即指向X轴的正方向。伸出食指和中指,食指指向Y轴的正方向,中指所指示的方向即是Z轴的正方向。
要确定轴的正旋转方向,用右手的大拇指指向轴的正方向,弯曲手指。那么手指所指示的方向即是轴的正旋转方向。
1.2 用户坐标系(UCS)
用户坐标系为坐标输入、操作平面和观察提供一种可变动的坐标系。定义一个用户坐标系即改变原点(0,0,0)的位置以及XY平面和Z轴的方向。可在AutoCAD的三维空间中任何位置定位和定向UCS,也可随时定义、保存和复用多个用户坐标系。
2.坐标系的建立方法
坐标系的建立方法有很多种,比如“3-2-1”工件找正方法,RPS找正,三个中心点找正,复杂曲面找正等等,下面介绍经常用到的“3-2-1”工件找正方法和RPS找正这2个方法。
2.1 “3-2-1”法建立坐标系
“3-2-1”方法就是确定面线点元素,从而建立坐标系。
2.1.1 确定第一坐标轴(面):方向的实际基准元素被测零件上必须有一个确定第一个坐标轴方向的实际基准元素, 它一般是零件的某基准平面或基准轴线。
2.1.2 确定第二坐标轴的方向(线):必须能在垂直于第一坐标轴的平面上确定第二坐标轴的方向。有时, 实际基准元素的方向与第一坐标轴不垂直, 则第二坐标轴的方向是基准轴线或基准平面法向在垂直于第一坐标轴的平面上投影的方向。
2.1.3 确定坐标原点(点):必须能确定坐标系原点。工件坐标系原点通常应选在测量中无附加计算便能获得较多的测量结果且能与图样上标注的尺寸进行比较的位置上。
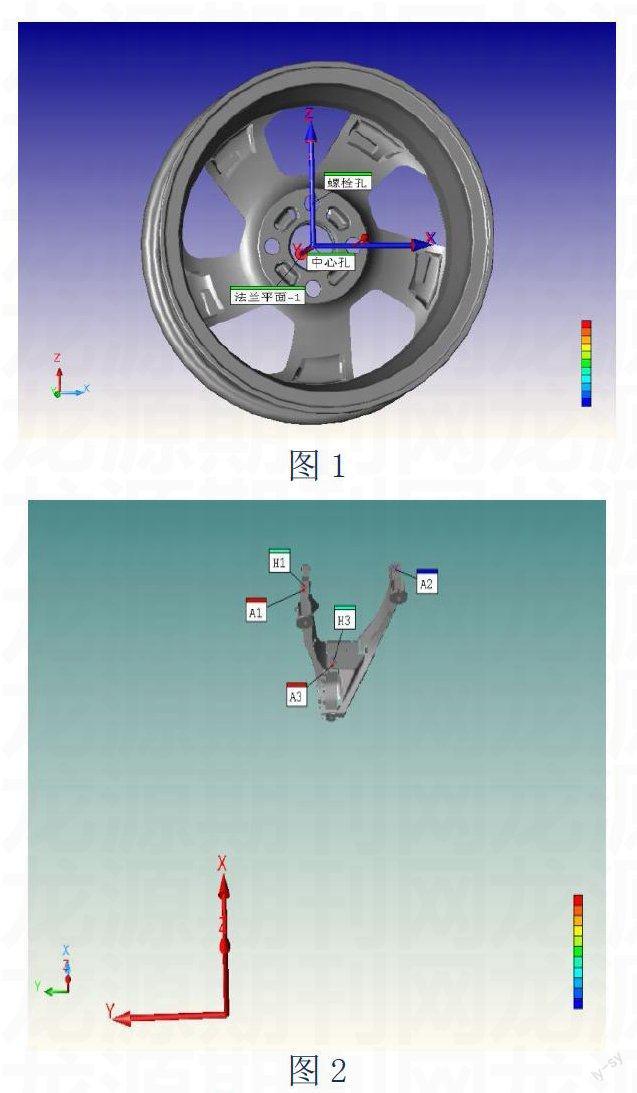
例如,在车轮中典型的应用“3-2-1”方法,由安装面,中心孔和螺栓孔组合直线,中心孔来建立车轮坐标系,如图1所示。
2.2 RPS找正
RPS系统就是规定一些从开发到制造、检测直至批量装车各环节所有涉及到的人员共同遵循的定位点及其公差要求。在确定这些定位点时必须遵循RPS系统的规则。
RPS坐标系主要应用在工件的坐标系不再工件本身或无法找到相应的基本元素,如面线点等来确定轴向或者原点,多为曲面薄壁件钣金类零件。按照零件特性选择三个与整车坐标轴平行的平面并求其交点,这个交点定义为RPS系统的基准点。基准点相对于整车坐标没有公差,零件尺寸以基准点为起点标注。
例如:如图2所示为一仪表盘支架,其坐标系是由A1、A2、A3、H1、H3五个元素来进行RPS找正,红色坐标系为工件坐标系,其工件的坐标原点不再工件上。设置好循环次数和找正后元素实测值与名义值误差。成功建立坐标系后进行工件测量。
3.总结
随着CAD 技术的发展, 测量技术被广泛应用于实际工程中。与三坐标测量机配套的相应测量软件也逐渐成熟。本文讨论了在实际测量前期坐标系统建立的有关技术问题, 坐标系统的建立对后续测量工作以及数据处理起到至关重要的作用。建立工件坐标系是非常灵活的,在测量过程中我们可以根据具体情况和测量的需要多次建立和反复调用零件坐标系,利用三坐标检测工件可以达到准确、快速、高效的目的。
参考文献:
[1]王亚平,郑彦龙.三维测量软件系统中坐标系的建立方法[J].工业计量.2004.14(6):27-30.
[2]梁荣茗.三坐标测量机的设計、使用、维修与检定1 中国计量出版社.2000.
[3]孙宏丽,吴洪涛,缪群华,程世利,赵大旭.基于完全笛卡尔坐标O(N)次正向动力学研究[J].机械科学与技术.2010.03:364-368.
[4]王洋.笛卡尔科学及其哲学之间的关系问题研究[D].华东师范大学.2012.
