四轮转向前后梯形优化设计
2015-05-27黄妙华
黄妙华,程 勇
(武汉理工大学 汽车工程学院,湖北 武汉430070)
四轮转向技术作为一种有效的主动安全技术已经得到广泛重视。高速时,前后轮同向转动可改善车辆的操纵稳定性;低速时,前后轮异向转动可减小最小转弯半径,提高车辆的通过性[1-2]。四轮转向技术应用于消防车辆上可帮助车辆通过狭窄的城市路段。商用车四轮转向的研究集中于四轮转向控制策略的研究,主要采用线性二自由度模型,将车辆简化为自行车模型,分析车辆高速的操纵稳定性[3-4]。
转向车辆的四轮模型,考虑了内外侧车轮的干涉问题。建立基于转向梯形参数的评价方法,并分析四轮转向梯形机构的运动瞬心偏差产生原因,优化计算得到了最优的前后梯形参数。
1 运动瞬心偏差
某前轮转向消防车最小转弯半径为8.5 m。将后桥改为转向驱动桥,后转向梯形前置,要求转弯半径减小至5.9 m。前桥参数:两前主销距K1为1.798 m,梯形臂长m1为0.169 m,梯形底角γ1为75.4°。后桥参数:两后主销轴线与地面交线的距离K2为1.68 m,梯形臂长m2为0.281 m,梯形底角γ2为82.2°。前后轴距L=4.5 m[5]。
理想的车轮轴线交于一点,但4 个车轮轴线两两相交产生4 个交点A、B、C和D,如图1 所示。若4 点重合于一点,瞬心偏差最小,车轮的磨损也最小。低速行驶时,车辆处于平衡状态,运动瞬心在四边形区域ABCD中。
存在一点R,使得∠RMD=∠RNC,∠RPB=∠RQC。用f=∠RMD+∠RNC+∠RPB+∠RQC评价瞬心位置偏差;f越小,瞬心偏差越小,车轮磨损量越小。存在一个最小圆,包含交点A、B、C和D,即为当前转向状态的交圆。

图1 瞬心偏差示意图
2 四轮转向梯形机构仿真分析
2.1 前转向梯形优化设计
图2 为前桥梯形示意图,图中A、B为前主销轴线与地面的交点,C、D为梯形拉杆交接点在地面的投影。
整体式转向梯形理想内轮转角θf2与外轮转
角θf1的关系为:

实际的内外轮转角关系为:

其中,有:


图2 前转向梯形示意图
基于Ackerman 定律优化前转向梯形参数,前外轮转角范围为0° ~30°,建立前桥转向梯形的评价函数。

其中,权函数[6]为:

前转向梯形的最小传动角为:

其中,前外轮最大转角A为30°。
考虑到实际装配等要求,选定前桥参数的优化范围,前梯形臂长m1在0.16 ~0.18 m 之间,前梯形底角γ1在67° ~77°之间。最优的前轮轴线交点在后桥轴线附近[7-8]。
如式(2)所示,评价函数f(m1,γ1)是关于m1和γ1的二元函数,每个m1和γ1都对应唯一f(m1,γ1)。在图3 中,线1 处的梯形传动角为30°。A为最优区域,梯形质量最好,且满足最小传动角的要求。前转向梯形质量对梯形底角值敏感,对梯形臂长不敏感。最优区域内中间区域梯形底角值即为最理想的值。优化后的前梯形臂长为0.169 m,前梯形底角为72°。
优化前后的前桥内轮实际转角与理论转角之差的曲线如图4 所示。优化后,在车辆经常使用的小转角区域,内轮实际转角与理论转角更接近。
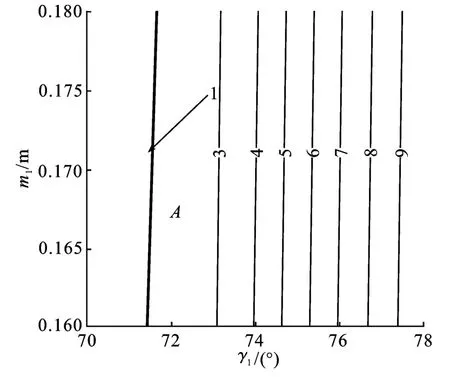
图3 前桥评价函数等高线图
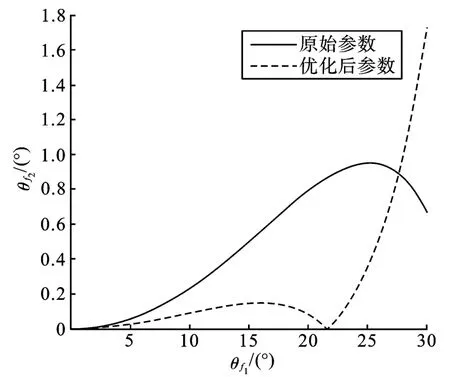
图4 前桥内外轮转角关系
2.2 后转向梯形机构评价方法
转动瞬心的偏差与前后梯形参数和前后轮的实际转角相关,前后轮的转角决定车辆的转弯半径[9-10]。在前后外轮转角分别为θf1,θr1的情况下,建立转角评价函数为:

四轮转向时,前后外轮转角关系为:

建立基于后转向梯形参数的瞬心偏差评价函数为:

后梯形最小传动角为:

后转向梯形外轮最大转角B=20°。转弯半径为主销偏移距。R+r、R-r分别为转弯半径上限与下限,r为交圆半径。
2.3 后转向梯形仿真分析
由式(5)可得关于后梯形臂长m2和后梯形底角γ2的梯形二元函数f(m2,γ2),并绘制出后梯形评价函数等高线图,如图5 所示。后梯形臂长m2在0.26 ~0.34 m 之间,后梯形底角γ2在60° ~70°之间。考虑到保证梯形传动效率的要求,后梯形的最小传动角δ2≥30°。由图5 可知,瞬心偏差量对后梯形臂长m2不敏感,对后梯形底角γ2敏感,且梯形底角值越小,瞬心偏差越小。线1 处的后桥梯形最小传动角为30°。在保证传动角要求的前提下,选择图5 中线1 右侧并靠近线1 的区域为最优区域。不改变后梯形臂长m2,选择最佳的后梯形底角值γ2。点2 为优化前后桥参数m2和γ2的位置,评价函数值为1. 092。点3 为优化后后桥参数m2和γ2的位置,评价函数值为0.778 4。优化后评价函数值减小28.7%。优化后的后梯形臂长m2为0.281 m,后梯形底角γ2为62°。

图5 后梯形评价函数等高线图
将原梯形参数与优化后的梯形参数代入式(3),可得到不同的前后轮转角情况下的瞬心偏差等高线图。图6 为原梯形参数瞬心偏差等高线图,图7 为优化后梯形参数瞬心偏差等高线图。优化后,瞬心偏差最大值减小了46%。

图6 原梯形瞬心偏差等高线图
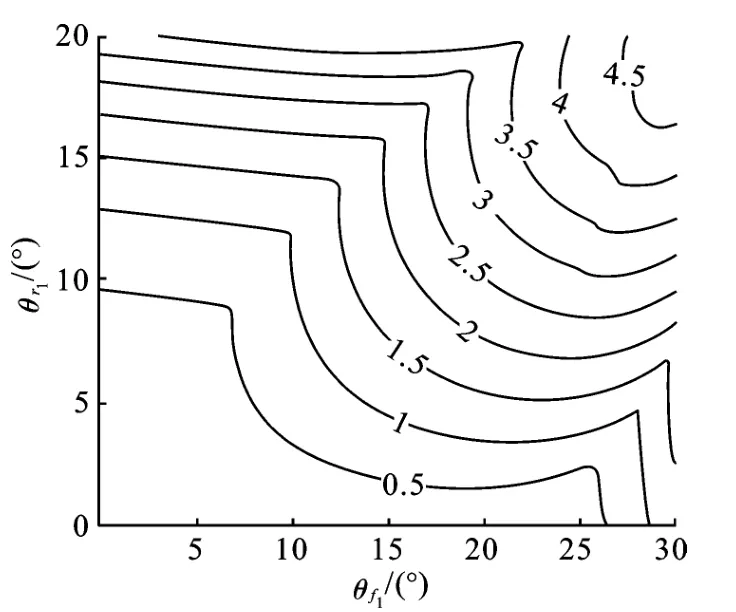
图7 优化后梯形瞬心偏差等高线图
3 结论
运动瞬心偏差量可以用来评价当前状态下的车轮磨损量。用后转向梯形评价方法优化后转向梯形参数,优化后瞬心偏差量明显减小。
优化前的最小转弯半径R为6.07 m,最大交圆半径r为0.40 m。优化后的最小转弯半径R为5.85 m,最大交圆半径r为0.21 m。优化后最大交圆半径减小,转弯半径估算更准确。
[1]胡国强. 汽车四轮转向系统转向特性的研究[D].武汉:武汉理工大学图书馆,2012.
[2]NAGAI M,UEDA E.Nonlinear design approach to four wheel steering system using neural networks[J].Vehicle System Dynamics,1995,24(4 -5):329 -342.
[3]SHIOTSUKA T,NAGAOKA M.Adaptive control of 4WS system by using neural network[J].Vehicle System Dynamics,1994,23(5-6):411-424.
[4]徐锐良,曹青梅. 车辆转向梯形机构的参数优化[J].拖拉机与农用运输车,2008,35(1):38 -40.
[5]王宵锋,胡涛. 不同整体式转向梯形机构分析方法的对比研究[J].汽车技术,2005(8):8 -11.
[6]王望予. 汽车设计[M]. 北京:机械工业出版社,2000:189 -191.
[7]DURSTINE J.The truck steering system from hand wheel to road wheel[J].SAE ,730039.
[8]SHOICHI S.Four wheel steering system with rear wheel steer angle controlled as a function of steering wheel angle[J].SAE,860625.
[9]孙营.重型商用车转向系统建模及整车动力学仿真研究[D].武汉:华中科技大学图书馆,2011.
[10]GERALD M,ROBERT R,FRED W. Optimum ackerman for improved steering axle tire wear on trucks[J].SAE,912693.
