单同步坐标系软件锁相环控制器参数设计
2015-05-27夏泽中王友阳
夏泽中,冯 林,王友阳,黄 刚
(武汉理工大学 自动化学院,湖北 武汉430070)
为实现对网侧有功功率和无功功率的控制,电池储能系统、太阳能发电等含并网变换器的系统接入电网时,需要对电网电压、相位和频率进行实时准确的跟踪。锁相环是并网变换器的重要组成部分,其性能的优劣直接影响到系统的并网控制性能。由于锁相环在并网变换器中的重要性,许多学者对锁相环进行了研究。文献[1-3]阐述了三相数字锁相环的基本原理并对三相锁相环的基本性能及各种干扰下的输出误差进行了较全面的分析。文献[4-5]分别研究了单/双同步坐标系软件锁相环的仿真模型,针对电网电压三相平衡和不平衡情况,对单/双同步坐标轴系下软件锁相环的运行性能进行了仿真比较。文献[6]提出了一种采用DSP 实现三相锁相环的方法,并分析了数字系统中软件锁相环的性能。文献[7]对单同步旋转坐标变换的三相锁相环技术在储能系统中的应用进行了研究。文献[8]在单同步旋转坐标锁相环结构中加入了前馈环节以提高锁相环在频率波动较大情况下的跟踪速度。上述文献大部分是关于三相锁相环的结构设计、原理分析和性能研究,而关于锁相环PI 控制器参数设计的方法鲜有提及。由于锁相环系统为非线性系统,因此增加了控制器参数设计的复杂性。
笔者就三相锁相环控制器参数设计问题展开研究,对单同步坐标系三相软件锁相环采用了微偏线性化近似处理。在此基础上推导出一套简单、实用且适用于数字系统的三相软件锁相环控制器参数设计公式。利用该组公式可以很方便地整定出三相软件锁相环的控制器参数。建模仿真结果表明,由该套公式计算出的PI 参数能使三相锁相环具有快速准确的锁相效果。
1 单同步坐标系软件锁相环原理
锁相环是一种相位反馈控制系统,不仅能实现对恒频率信号的跟踪控制,而且对频率变化的信号也具有较高的跟踪精度和灵敏度。单同步坐标系软件锁相环是一种基于坐标变换的对电网电压矢量进行跟踪来实现锁相的方法。在电网电压平衡时能快速检测电网电压频率、相位,以及电压幅值。在电网电压平衡的条件下,电网电压只存在正序分量,在abc坐标系下表示为:

式中:Em为三相交流输入电压幅值;ω 为电网电压角频率。
通过同步旋转坐标变换将电网电压从静止的abc坐标系变换到同步dq0 坐标系下。其中电网电压空间矢量V定向d轴。d轴与a轴的夹角为θ,变换方程如式(2)所示。

由式(1)和式(2)可得:

变换后的电压矢量图如图1 所示。图中V为电网实际电压矢量以同步坐标系中的d轴定向旋转,Vpll为锁相环输出电压矢量,θ 为实际电压矢量角度,为锁相环输出的电压矢量角度的估计值。当锁相环锁定时Vpll和V完全重合,即θ-=0。在dq0 坐标系下=0。当电网电压相位发生突变时,Vpll和V不重合。此时Ud、Uq如式(4)所示。

式中:Em为电网三相电压幅值;Δθ 为电压矢量角度误差;ωff为电网实际角频率;ω0为锁相环输出角频率估计值;φerror为电网实际电压矢量相角与锁相环输出相角的初始相位差。由式(4)可得,当频率未锁定时,Uq为一交流分量。当相位未锁定时,Uq为一直流分量,其大小与φerror近似成正比关系。当完全锁定时,Uq=U=0。因此,根据以上规律设计出基于Uq的PI 控制器来实现锁相功能。

图1 单同步坐标系锁相环矢量图
2 三相锁相环控制器结构分析及参数设计
基于以上分析建立单同步坐标软件锁相环系统,其控制结构图如图2 所示。系统以锁相输出Uq,误差输入PI 调节器。为提高锁相的速度,将PI控制器输出值加上工频角频率ωff获得锁相输出角频率输出,再经过积分即可得到锁相相位值,在新的相位值下算出Uq。继续反馈调节,直至Uq=0,锁相环输出旋转电压矢量和实际电网电压矢量完全重合,实现锁相,其控制结构简图如图3 所示。
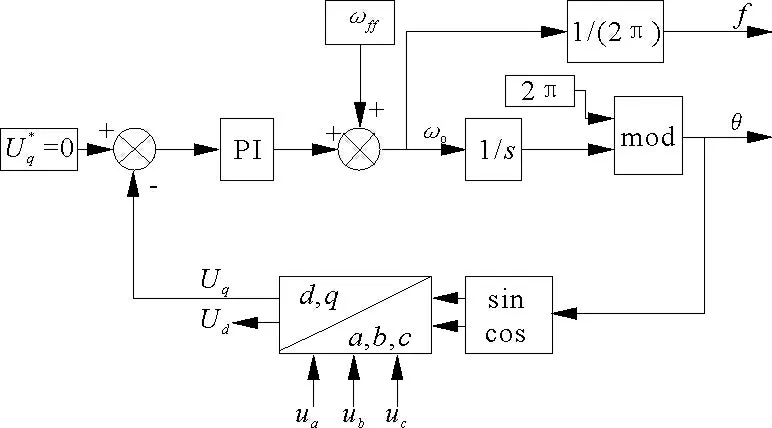
图2 单同步坐标系锁相环控制结构原理图

图3 锁相环控制结构简图
在误差Δθ 较小时,sin(Δθ)≈Δθ。为方便参数整定,可对控制模型进行微偏线性化处理,并简化为单位反馈系统,其等效控制结构如图4 所示。

图4 锁相环等效控制结构图
其中,Ts为采样延迟对应的等效惯性时间常数(在数字系统中即对应为采样周期)。令PI 调节器的传递函数为:

则线性化处理后的开环传递函数H0(s)如式(7)所示。

由式(7)可得:

由式(8)可知,加入PI 调节器后的锁相环为一个典型的II 型系统,因此可按照典型II 型系统进行参数设计。为提高对电网电压矢量相角跟踪的快速性,对典型II 型系统而言,可设计适当的中频带宽h。

根据典型II 型系统参数设计关系可得:

系统采样延迟时间常数Ts在数字系统中对应采样周期为已知量,h可根据典型II 型系统性能要求指标[9],通过查表获得(在工程应用中常取h=5)。由此可根据式(6)、式(10)和式(11)求出PI 调节器参数在连续系统中对应的参数:

kP、kI均在s域中求得,属于连续系统中PI控制器的参数。单同步坐标系软件锁相环为离散系统,因此参数需进行离散化处理。
由式(5)可得PI 控制器对应的微分方程为:

在软件锁相环系统中,采样延时直接对应采样周期Ts。利用连续系统到离散系统近似变换法[10],可将式(14)变换为后向差分方程:
由式(10)、式(12)、式(13)和式(16)推导出单同步坐标系软件锁相环的PI 参数为:

3 单同步坐标系软件锁相环仿真验证
通过对三相锁相环的工作原理及结构的分析,在Matlab_simulink 仿真环境下对单同步坐标系软件锁相环进行建模仿真,以验证以上导出公式设计PI 控制器参数的合理性。仿真模型中电网为380 V/50 Hz 三相交流电,即交流电压幅值Em=537 V,系统采样频率为10 kHz,即采样周期Ts=100 μs。为保证系统的动静态性能要求,工程上常取h=5。将以上参数代入式(17)即可求出软件锁相环的离散PI 参数:kP=11.173,kI=2.235。图5 为在Simulink 中建立的单同步软件锁相环模型。仿真将在3 种电网波动(即频率、相位、电压波动)情况下进行,分别验证锁相环能否迅速跟踪电网波动准确锁相。运行时,电网电压在0.05 s 时,频率由50 Hz 突变跌落到45 Hz,相位突变30°,电压跌落一半,在0.1 s 时恢复正常。图6 ~图8 所示为在相位突变、频率突变和电压突变3 种情况下运行输出的波形,其中θ 为锁相环输出相位弧度。仿真结果显示,系统在3种突变情况下,锁相环最长在8 ms 以内完成对电网相位、频率和电压的精确跟踪来实现锁相。仿真结果验证了PI 参数设计的合理性。

图5 单同步坐标系软件锁相环仿真模型
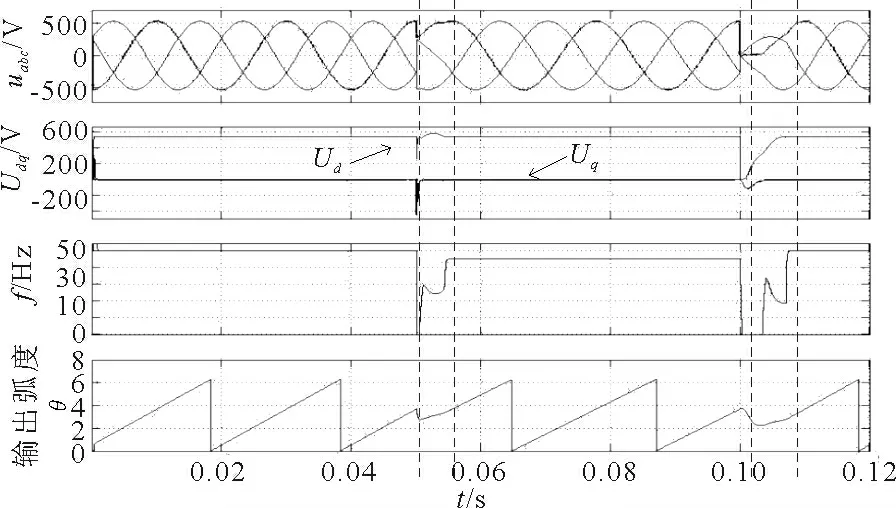
图6 相位突变锁相环输出结果
4 结论
针对并网系统中复杂的锁相环控制器参数设计问题,笔者在对锁相环结构进行微偏线性化处理的基础上,提出了一种采用典型II 型系统参数设计原则的控制器PI 参数设计方法,并推导出一套适用于单同步坐标系软件锁相环控制器参数设计公式。仿真实验结果表明,锁相环系统动静态性能优越,并验证了采用该套公式设计控制器PI参数的合理性和实用性。

图7 频率突变锁相环输出结果

图8 电压突变锁相环输出结果
[1]龚锦霞,解大,张延迟.三相数字锁相环的原理及性能[J].电工技术学报,2009,24(10):94 -99.
[2]姜英,陈明莉,刘宁.基于d-q坐标变换的三相锁相环研究[J].电工研究:电子世界,2013(7):61-63.
[3]吉正华,韦芬卿,杨海英.基于dq变换的三相软件锁相环设计[J].电力自动化设备,2011,31(4):104-107.
[4]张治俊,李辉,张煦,等.基于单/双同步坐标系的软件锁相环建模和仿真[J]. 电力系统保护与控制,2011,39(11):138 -143.
[5]张蕾,赵玺. 光伏逆变器三相锁相环技术与仿真[J].科学技术与工程,2010,28(10):7011 -7013.
[6]琚兴宝,徐至新,邹建龙,等.基于DSP 的三相软件锁相环设计[J].通信电源技术,2004,21(5):1 -4.
[7]吴昇,吴先良,郭玉堂.三相锁相环在蓄电池充放电装置中的应用研究[J].电气传动,2011,41(11):38-40.
[8]INDURANI B,ARAVIND C K,SARAVANA I L G,et al. A three phase PLL with a dynamic feed forward frequency estimator for synchronization of grid connected converters under wide frequency variations[J]. International Journal of Electrical Power & Energy Systems,2012,10(1):63 -70.
[9]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2004:72 -76.
[10]王万良.自动控制原理[M].北京:高等教育出版社,2008:210 -262.
