基于数字式MEMS传感器的声阵列成像系统设计*
2015-05-25陈林松曹跃云郭文勇刘树勇
陈林松 曹跃云 郭文勇 张 磊 刘树勇
(1海军工程大学动力工程学院 武汉 430033)
(2海军工程大学电子工程学院 武汉 430033)
1引言
在对设备噪声状况进行分析时,利用声阵列的噪声被动成像[1]技术理论上可以通过单次测量获得声场分布图像[2],快速掌握噪声源位置、分布情况以及动态变化特征,可以应用于设备状态评估[3],相对于传统声强测量和噪声频谱分析的优势明显。但是,采用传统的驻极体式声传感器研制的声阵列系统复杂,需要独立的数据采集系统,研制成本巨大,目前国内外常见的声阵列传感器数量一般不超过60个,适用于消声室或无混响的开阔空间进行声源定位,在非消声条件下一般针对音箱模拟声源进行测试,难以满足实用成像需求[4]。大型声阵列在潜艇、飞机等重要军事装备的噪声测试研究[5]具有重要的应用价值,文献[6]为美国NASA用于火箭喷射噪声成像研究的测试系统,阵列有72个驻极体传感器,数据采集系统由4个采集机柜组合而成,系统十分复杂。采用阵列扫描测量方式[7−9]可以弥补传感器数量不足的问题,但该方法适用于平稳声场[10−11],而实际机械设备噪声非平稳性强,应用中受限。
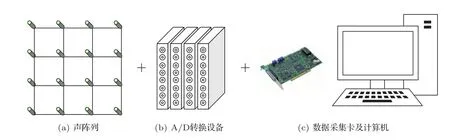
图1 传统声成像系统结构Fig.1 Traditional acoustic array system
本文采用了小型数字化的MEMS(Microelectro-mechanical system)传感器设计的声阵列成像系统,集成了FPGA控制、DSP数据处理和嵌入式系统,在大幅增加传感器数量的同时实现了数据采集系统的简化,在非消声室环境下对具有非平稳特征的机械设备噪声进行了测试验证,其声像分辨率高、动态效果良好,在实际机械设备噪声监测中用良好的应用前景。
2 系统设计
常规声阵列系统组成一般为“声传感器阵列+A/D转换设备+数据处理设备”式结构,如图1所示,其中A/D转换设备与声阵列的每一通道需要独立电缆线连接,通常以8个通道为一个采集模块,各采集模块之间还需保持同步和一致,而数据处理设备由加装数据采集卡及相应软件支持的电脑终端构成,系统复杂,操作不方便,增加传感器数量的成本巨大。
本设计的主要目标是大幅增加传感器数量,并尽可能使数据采集系统实现小型化,同时保证阵列数据处理的快速性能。为此,采用数字化MEMS声传感器设计声阵列,由于传感器输出为标准数字信号,系统不需要另加模数转换电路。文献[12]中采用了6个MEMS传感器进行了声源定位研究(无成像功能),文献[13]利用FPGA实现了对52传感器的数据采集和处理(用于声源识别和分离),本设计中通道数超过200个,数据采集控制、传输及数据处理难度大幅增加,没有现成的多通道Mems传感器的数据采集卡及软件可用,因而需要对数据采集控制、传输及数据处理系统进行全新设计。
系统结构如图2所示,系统简化为两个部分,前端集成在声阵列中,包括260阵元的MEMS阵列、FPGA数据采集控制、光纤数据传输以及摄像头模块,后端系统集成在主机中,包括光纤数据传输模块、实时数据存储、DSP实时数据处理以及显控系统。
前端系统主体为260个MEMS声传感器组成的阵列,FPGA数据采集控制模块、数据传输模块和摄像头设置在阵列中。其中FPGA的型号采用Xilinx公司Virtex5系列XC5VLX110T芯片,该芯片速度高、功耗低,可支持多达1200个的用户I/O接口,其性能满足本系统需求。MEMS传感器采用ADMP441传感器,该芯片集成化程度高、体积小、造价低,数字输出,不需要模数转化模块,标称采样率为48 kHz,平坦频率响应区间为60 Hz至15 kHz。MEMS声传感器多通道集成原理如图3所示,数据缓冲器、时钟分路器用来提升从传感器到FPGA之间的驱动能力。

图2 声成像系统结构Fig.2 Acoustic array system based on MEMS
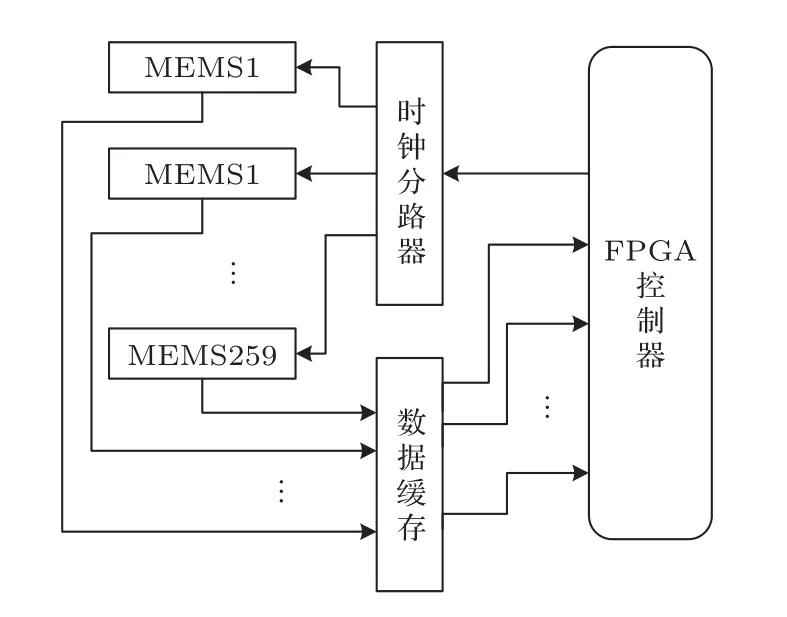
图3FPGA控制的MEMS模块原理图Fig.3 MEMS block control by FPGA
其中,MEMS传感器输出为24 bit标准音频信号,实际传输中占用32 bit,在50 kHz采样率下,260路信号的数据率为52 MB/s(260×50×4),网络传输速率至少为416 Mb/s,为此,选择光纤进行数据传输,以减小传输延迟;在进行成像处理算法中,对阵列信号的FFT变换需要消耗大量资源,若每次处理数据长度为4096点(时常约0.08 s,相应动态声像图帧速率约为12 FPS),则系统需要在0.08 s内完成约8.5 MB(260×4096×8)双精度数据的处理,为此,采用独立的DSP完成阵列数据成像算法处理,以保证现场即时成像需求。
主机原理如图4所示,CPU2模块作为用户终端,通过FPGA实现对CPU1、DSP模块、光纤传输模块以及电源模块的控制。FPGA通过异步串口(Universal asynchronous receiver/transmitter,UART)接收光纤模块数据后, 通过PCI总线(PCIE)将数据传到CPU1模块内,原始数据根据需要可以通过CPU1模块实时存储在处理板上的电子盘内;FPGA芯片同时通过SRIO(Serial rapid IO,高速串行IO接口)将数据传到DSP内,DSP完成对260通道高精度数据进行FFT变换等即时处理,将处理后的数据通过以太网(Ethernet)送到CPU2模块;CPU2模块将实时摄像头数据与处理结果融合,将融合后的动态图像提供给用户;在离线分析模式下,CPU2通过以太网可以直接访问CPU1数据,完成相应分析功能。
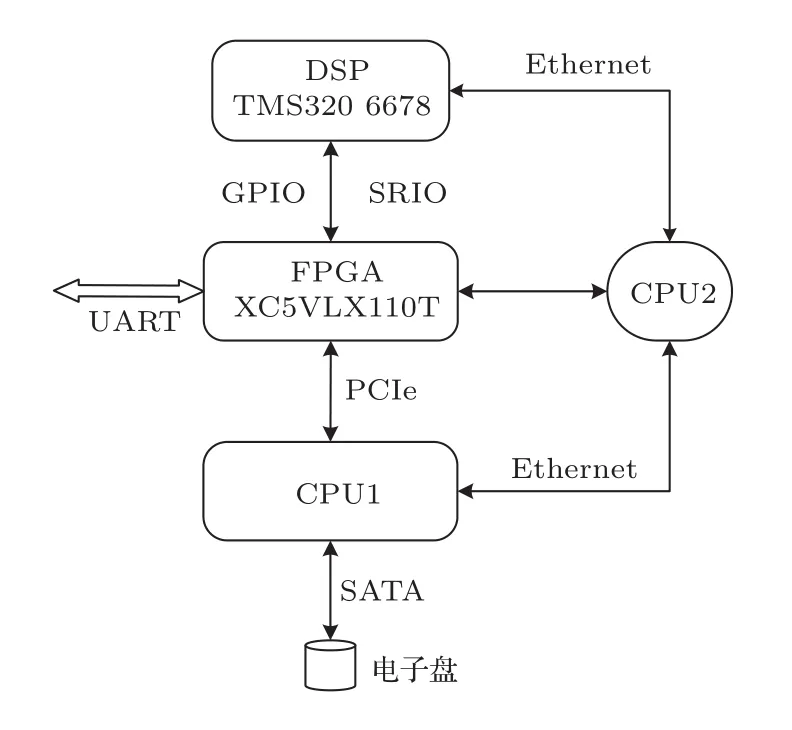
图4 后端主机原理图Fig.4 Circuit for mainframe
3 系统性能
3.1 阵列形式
传感器阵列的阵元分布如图5所示,中间分布密度高,最小网格距离为0.0213 m,周围分布密度小,最大网格距离为0.085 m,过渡部位网格间距0.0425 m,对应的最高成像噪声频率分别为16 kHz、8 kHz和4 kHz,这种分布特征兼顾了低频噪声对阵列孔径要求大、传感器分布密度低以及高频早上好对阵列孔径要求小、传感器分布密度高的不同要求,具备1∼16 kHz范围内波束形成成像的条件。同时,其中均匀网格分布的144个传感器可以用于近场声全息测试。
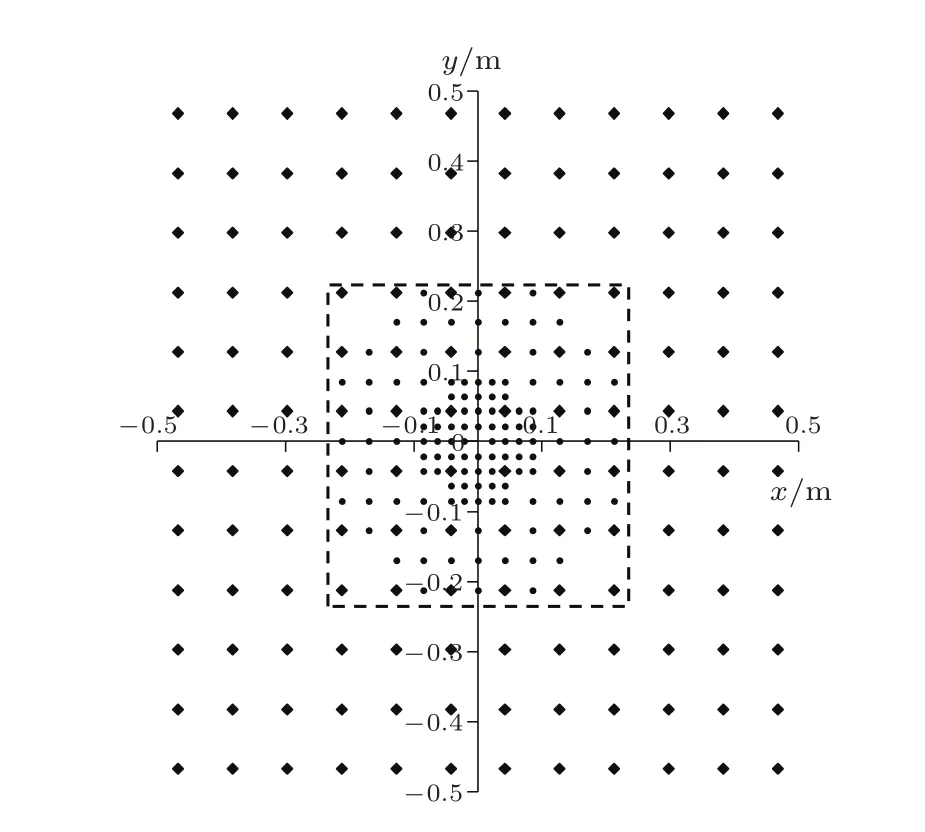
图5 嵌套式阵列声传感器分布Fig.5 Distribution of microphone in nested array
3.2 阵列方向图
阵列的静态方向图体现其在远场条件下对指定频率下的目标定位精度和抗干扰能力[14],计算该阵列在2 kHz∼15 kHz均具有较好的指向性,其中对3 kHz噪声的二维静态方向图如图6所示,可以看出其主瓣宽度窄,旁瓣幅值低,从而具有较强抗干扰能力[15]。
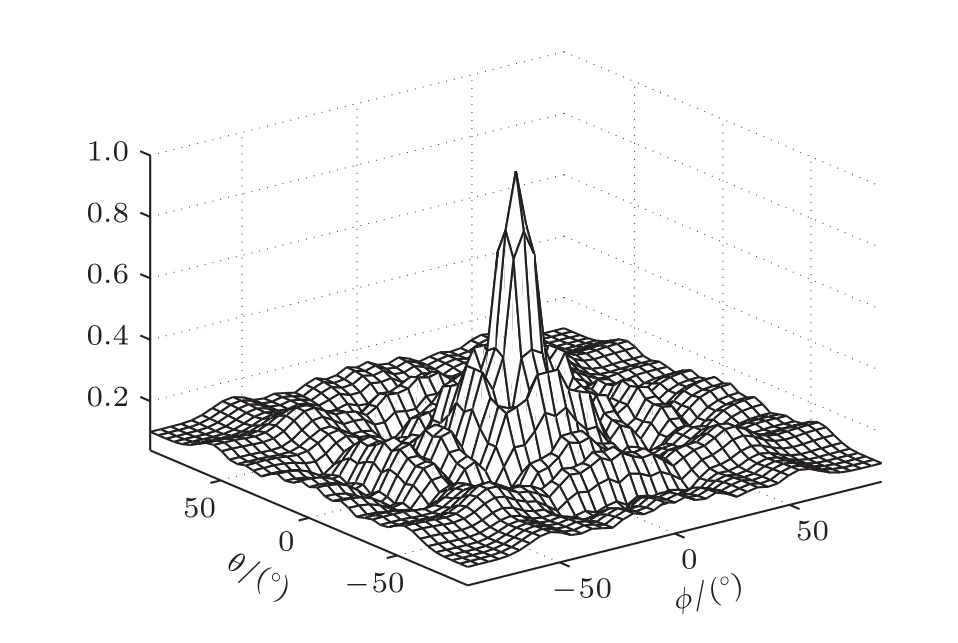
图6 对3 kHz噪声的方向图Fig.6 3 kHz beamforming pattern
目标定位精度由阵列的分辨率R受声波长度λ、阵列孔径D、测量距离z及聚焦角度θ等因素影响:

式(1)中α为常数,声波长度λ与阵列传感器间距d存在如下关系:
由式(1)、式(2)可知阵列孔径越大、阵元间距越小,则相应的阵列分辨率越高,能够适应的噪声频率范围越大,本阵列阵元数量大,保证了在较大的阵列孔径和较小的阵元间距,从而具有较高的空间分辨率。
3.3 性能测试
该型MEMS传感器具有良好的幅频响应性能,其手册提供的响应特征如图7所示,经本阵列测试验证可用的成像频率范围为100 Hz至15 kHz。
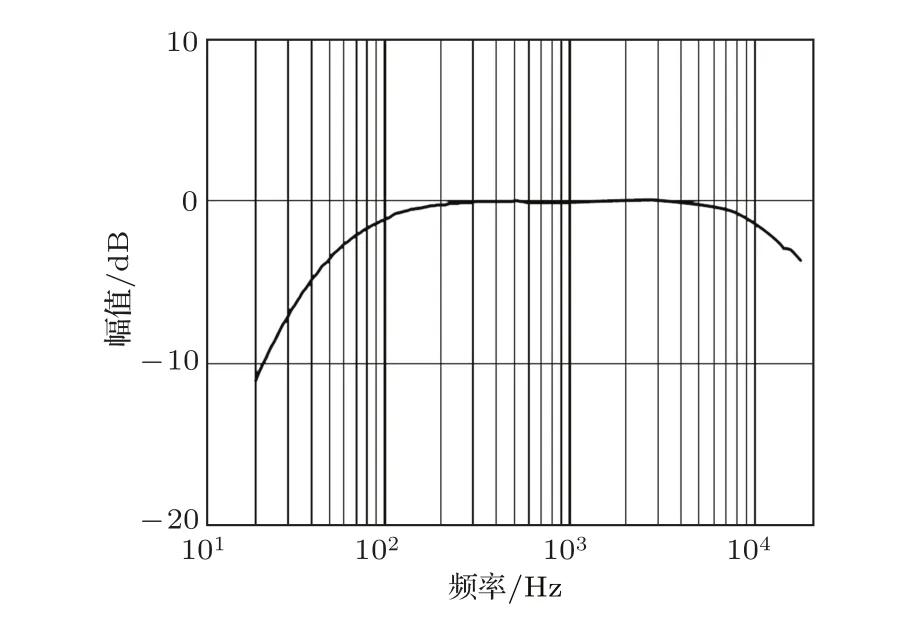
图7 传感器典型的频率响应Fig.7 Typical frequency response
阵列传感器接收数据的幅值、相位一致性是阵列的重要性能参数,受传感器一致性、数据采集电路性能等各种因素影响,当传感器数量大幅增加时,保持一致性的难度增大。用小孔径音盆模拟500 Hz声源,置于阵列正前方0.3 m处,实测各阵元0.1 s声压波形数据的相位分布如图8所示,基本处于一平滑的曲面上,与理论预测一致,表明本系统获取的数据具有较好的相位一致性。
利用2只音箱模拟相干声源对系统成像性能进行测试,100∼500 Hz采用声全息成像(距离0.1 m),成像如图9所示,500 Hz∼15 kHz采用去自谱宽带波束形成成像(距离1.5 m),对白噪声在3.9∼4.1 kHz左右的成像如图10所示,声像图与声源实际分布一致。
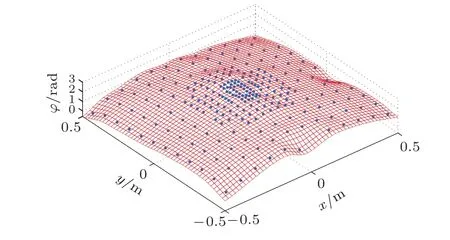
图8 阵元信号相位一致性检查Fig.8 Phase equalization test for array cells
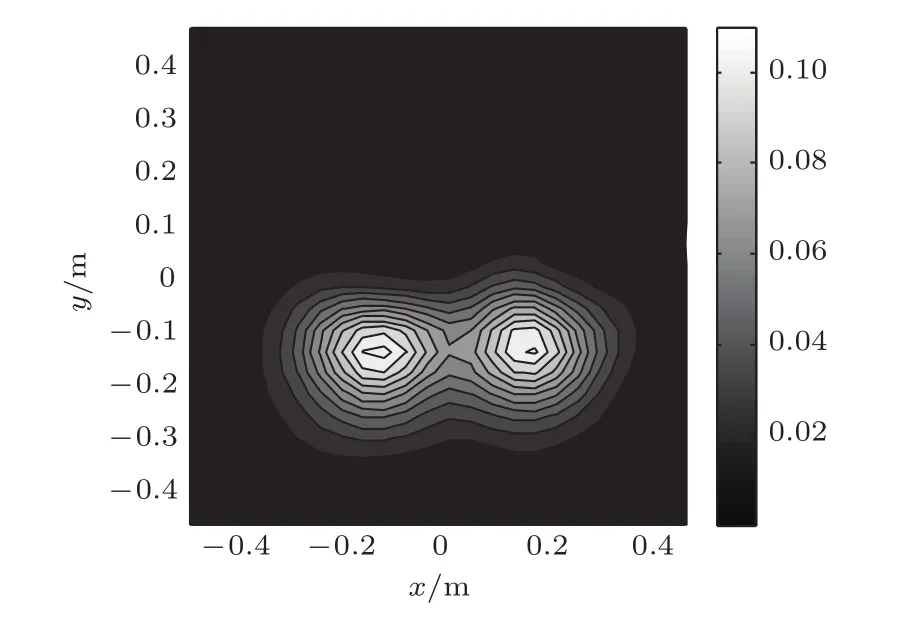
图9 对100 Hz噪声的全息成像Fig.9 Acoustic holography of noise at 100 Hz
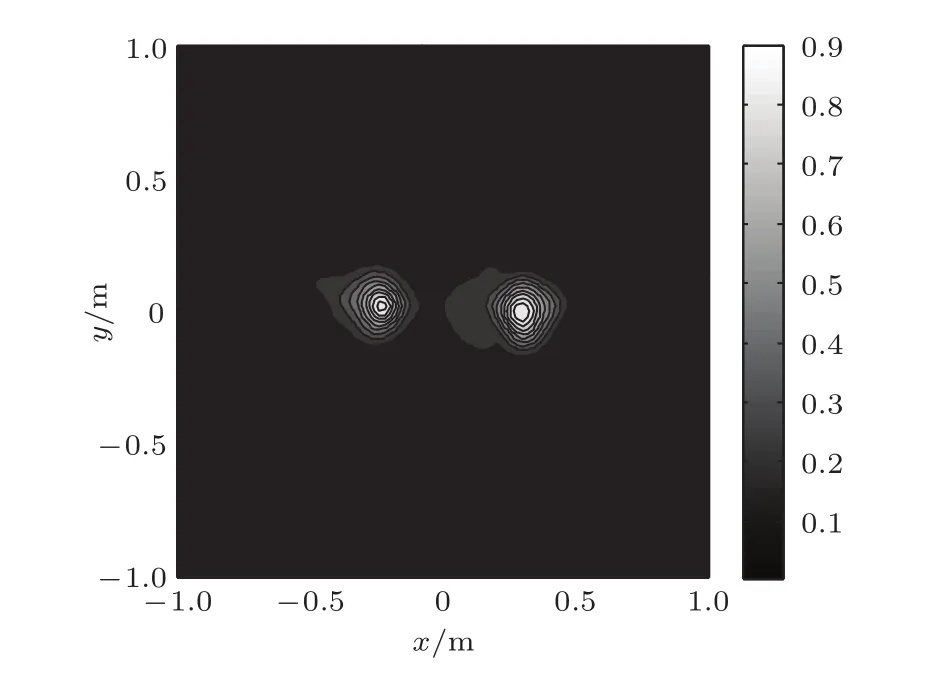
图10 模拟白噪声在3.9∼4.1 kHz的波束形成成像Fig.10 Beamforming images of white noise at 3.9∼4.1 kHz
4 实验验证
利用该系统对一齿电机-轮箱-油泵系统进行声成像测试,阵列布置如图11所示,阵列面与测试台距离1.2 m,噪声数据采样率为50 kHz,场地为非消声条件下的普通实验室环境。
采用自谱频域波束形成算法实现成像[16],单次成像处理数据时长为0.1 s,每秒成像10次,选择4.9 kHz至5.1 kHz宽带波束形成成像,在不同测试环境、不同测试距离的成像效果如图12所示,图12中2个扬声器产生宽带白噪声信号的干扰,用来检验系统对多声源的成像能力,其中图12(a)测试距离为2 m,图12(b)测试距离为1.1 m,试验表明成像效果稳定,显示的声源位置与实际情况一致,不同测试环境和测试距离下声像图保持一致,表明该测试系统可重复性良好。
另外,利用空压机气体泄漏噪声进行测试,选择较高频段成像正确定位气体泄漏源位置,对机械噪声有较强的抗干扰能力。
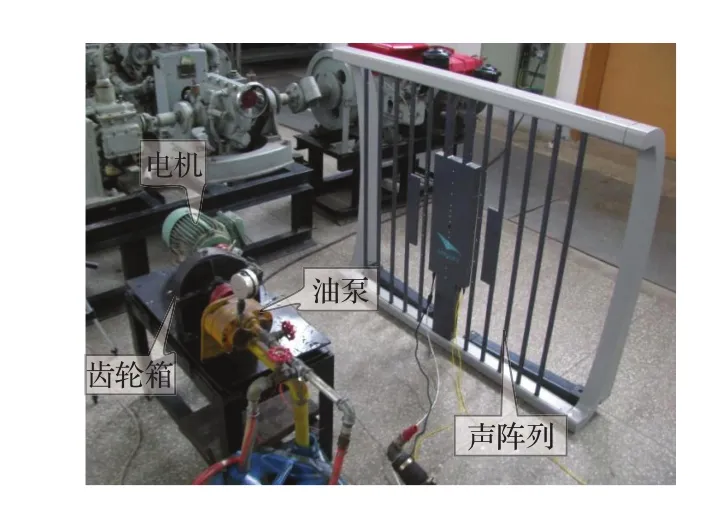
图11 机械噪声成像实验设计Fig.11 Acoustic imaging system for machinery noise
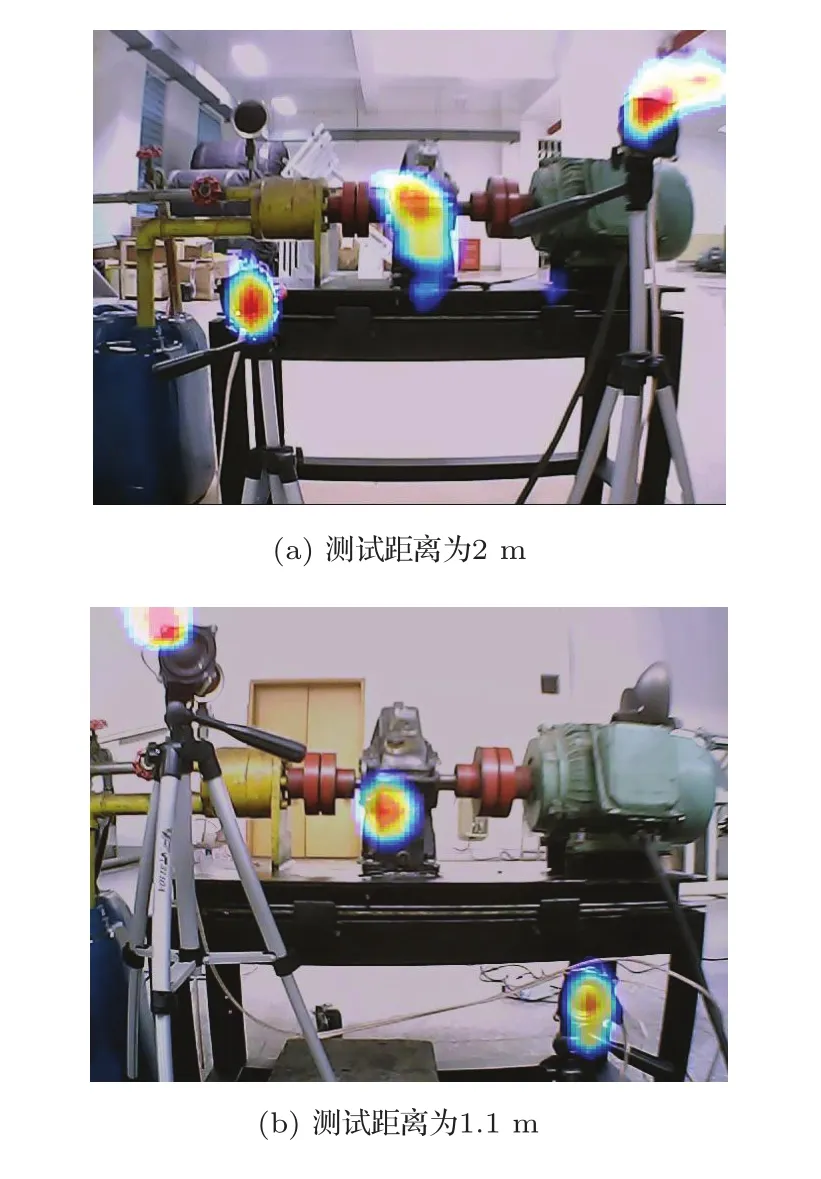
图12 多声源成像Fig.12 Acoustic imaging of multiple sources
5结论
本文创新性地采用MEMS声传感器研制了大型声阵列设备,采用嵌入式系统设计,系统集成了FPGA控制、光纤数据传输、DSP数据处理等技术,大幅增加了阵列声传感器数量,实现了数据采集系统的小型化,同时保障了现场实时动态成像的高速数据处理需求。经实际分析得到以下结论:
(1)基于数字式MEMS声传感器体积小、性能稳定,不需要额外的A/D转换设备,在大型声阵列中的应用具有优势,有利于声成像技术的应用推广。
(2)该系统测试噪声频率范围为100 Hz∼15 kHz,其中100 Hz∼500 Hz可采用声全息方法成像,500 Hz∼15 kHz采用波束形成成像;典型成像测试距离为0.1∼5 m,其中0.1∼0.3 m适用声全息成像,0.3∼5 m适用波束形成成像。
(3)声阵列指向性优越,系统抗噪性能较好,适用于非消声条件下实际机械设备噪声成像,可重复性好,在机械设备噪声监测应用中具有良好前景。
(4)系统动态成像典型帧速率为10 FPS,具备一定的瞬态成像功能,可用于非平稳声场的成像测试,现场获取声场动态变化图像,掌握设备噪声场的动态特征。
[1]李加庆,陈进,张桂才,等.可视化噪声源识别技术[J].声学技术,2007,26(1):90–95.
LI Jiaqing,CHEN Jin,ZHANG Guicai,et al.Visualization for noise sources identif i cation[J].Technical Acoustics,2007,26(1):90–95.
[2]WILLIAMS E G.Fourier acoustics:sound radiation and near-f i eld acoustical holography[M].Washington.D.C.:Academic Press,1999.
[3]侯俊剑.基于声像模式识别的故障诊断机理研究[D].上海:上海交通大学,2011.
[4]BAI M R,IH J G,BENESTY J.Acoustic array system[M].Singapore:John Wiley,2013.
[5]WILLIAMS E G,HOUSTON B H.Interior near-f i eld acoustical holography in f l ight[J].J.Acoust.Soc.Am.,2000,108(4):1451–1463.
[6]PANDA J,MOSHER R.Use of a microphone phased array to determine noise sources in a rocket plume[R].Reston:AIAA,2011.
[7]KWON H S,KIMA Y H.Moving frame technique for planar acoustic holography[J].J.Acoust.Soc.Am.,1998,103(4):1734–1341.
[8]CIGADA A,LURATI M,RIPAMONTI F,et al.Moving microphone arrays to reduce spatial aliasing in the beamforming technique:Theoretical background and numerical investigation[J].J.Acoust.Soc.Am.,2008,124(6):3648–3658.
[9]刘月蝉,孙超,何元安.旋转式阵列声源定位技术研究[J].声学技术,2011,30(3):31–33.
LIU Yuechan,SUN Chao,HE Yuan’an.Research on sound source localization technology using rotating array[J].Technical Acoustics,2011,30(3):31–33.
[10]陈志敏,朱海潮,毛荣富.循环平稳声场的声源定位研究[J].物理学报,2011,60(10):449–455.
CHEN Zhimin,ZHU Haichao,MAO Rongfu.Research on localization of the source of cyclostationary sound f i eld[J].Acta Physica Sinica,2011,60(10):449–455.
[11]张海滨,万泉,蒋伟康.HELS法在循环平稳声场全息重建中的理论与实验研究[J].物理学报,2009,58(1):333–340.
ZHANG Haibin,WAN Quan,JIANG Weikang.Theorical and experimental research on the HELS method in the cyclostationary acoustic f i eld[J].Acta Physica Sinica,2009,58(1):333–340.
[12]汪明,陈建辉,王广龙,等.基于数字式 MEMS声传感器阵列的声源定位系统设计[J].传感技术学报,2013,26(8):1105–1109.
WANG Ming,CHEN Jianhui,WANG Guanglong,et al.Sound source localization system design based on digital MEMS acoustic sensor array[J].Chines Journal of Sensors and Actuators,2013,26(8):1105–1109.
[13]MARCOS T,SANIIE J,ORUKLU E.MEMS acoustic array embedded in an FPGA based data acquisition and signal processing system[C]//Circuits and Systems(MWSCAS),53rd IEEE International Midwest Symposium.Seattle:IEEE,2010:1161–1164.
[14]张小飞,汪飞,陈伟华.阵列信号处理的理论与应用[M].第二版.北京:国防工业出版社,2013.
[15]肖明.波束形成算法抗干扰性能分析[D].武汉:华中科技大学,2012.
[16]张芳芳.波束形成方法在噪声源识别应用中的仿真和实验研究[D].上海:上海交通大学,2007.