基于Matlab无刷直流电机控制系统仿真
2015-05-22王亚茹宋晓梅巩学芳
王亚茹,宋晓梅,何 程,巩学芳
(西安工程大学 电子信息学院,陕西 西安710048)
0 引 言
BLDCM是一种集电机和电子一体化的高新技术产品,不仅保留了普通直流电机运行效率高、无机械摩损、机械特性优良等优点,还具有结构简单、运行可靠、控制灵活等优势,广泛应用于航空航天、工业和民用等方面[1-2].随着各种高性能微处理器不断推出,对BLDCM控制系统的设计、成本、开发周期等方面的要求也有了进一步的提升.通过利用BLDCM控制系统的仿真模型,可以节省控制系统的设计时间,并能对施加于系统的控制算法及时做出验证,实时考察系统在不同情况下的静态、动态特性[3].同时可以人为在计算机仿真模型中改变模块结构,加入不同的扰动或改变系统参数,考察系统的结构特性.因此,如何建立BLDCM控制系统模型的问题亟待解决.文中在 Matlab/Simulink[4-5]环境下,利用工具箱,分模块建立了BLDCM控制系统的计算机仿真模型[6-7],通过仿真试验,验证了BLDCM数学模型的合理性及PID控制方法的有效性[8-9].
1 BLDCM的工作原理及数学模型
1.1 工作原理
BLDCM和永磁同步电机结构类似,为了完成无刷换相功能,BLDCM将一般直流电机上的电枢绕组固定到定子上,而将永磁铁放到转子上,以产生固定磁场[10-11].换相装置由位置传感器、控制电路、驱动电路和功率电子器件共同构成.控制电路将接收到的位置传感器信号转换成驱动电路可识别的信号,用以控制逆变器各功率管的通断,产生连续转矩;还可通过接收到的速度指令和速度反馈信号,控制逆变器各功率管的通断频率,起到控制和调整转速的作用.
1.2 数学模型
由于BLDCM的反电动势包含有较多高次谐波的梯形波,并且BLDCM为非线性电感,因此,采用dq变换理论不能实现有效分析,而直接利用电动机原有的相变量来建立数学模型却比较方便.以两相导通星形三相六状态为例,分析BLDCM的数学模型及电磁转矩等特性.作如下假设:
(1)相绕组完全对称,定子电流、转子磁场分布皆对称,气隙磁场为方波;
(2)不计齿槽、换相过程和电枢反应等的影响;
(3)电枢绕组在定子内表面连续均匀分布;
(4)磁路不饱和,忽略涡流和磁滞损耗.
1.2.1 电压方程 BLDCM定子三相绕组的电压方程可表示为

式中,ua,ub,uc为三相定子电压,V;ia,ib,ic为三相定子相电流,A;ea,eb,ec为三相定子的反电动势,V;Ra=Rb=Rc=R为三相定子绕组的相电阻,Ω;La=Lb=Lc=L为三相定子自感,H;Lab=Lac=Lba=Lbc=Lca=Lcb=M为三相定子绕组之间的互感,H;p为微分算子.
由于三相对称的电机中,ia+ib+ic=0,Mia+Mib+Mic=0,则式(1)可改写为

1.2.2 转矩方程 电磁转矩方程可表示为:

式中,ω为转子机械角速度,rad/s.
运动方程可表示为

式中,TL为负载转矩,N·m;B为阻尼系数,N·m·s/rad;J为电机的转动惯性kg·m2.
2 BLDCM控制系统仿真模型
在Matlab/Simulink的环境下,通过分析BLDCM的工作原理和数学模型,给出了建立BLDCM控制系统仿真模型的方法.在BLDCM仿真系统的转速环加入PID调节器,电流环则采用电流滞环调节器控制,以此实现系统的双闭环控制方案.按功能的不同,将BLDCM控制系统分割为独立的子模块,再通过这些功能模块之间的关联性将其有机整合,便可在Matlab中搭建出BLDCM控制系统的仿真模型,同时将双闭环的控制算法运用其中,实现系统的优良调节.图1为无刷直流电机控制系统的仿真建模整体框图.
2.1 BLDCM本体模块
在整个控制系统的仿真模型中,BLDCM属于核心模块.但由于SimPowersystem里只有单纯的同步电机,而没有BLDCM的模型,所以根据以上数学模型中所给定的变量关系,重新构建包含电机电压、电磁转矩、电机位置及转速等参数的BLDCM模块.
由式(2)可得,三相电流信号的获得必须以求得三相反电动势信号ea,eb,ec为前提,而BLDCM建模过程中,关于梯形波反电动势的求取一直属于技术难点.反电势波形的输出状态直接影响到BLDCM的相电流波形和转矩脉动情况,当偏差严重时,还可能致使电机换相失败而失去控制.因此,BLDCM仿真建模中获得理想的反电动势波形是至关重要的.文中采用分段线性法建立梯形波反电动势波形.即将一个360°运行周期分为6个阶段,每一相在每个60°的运行阶段内都可用一段直线表示,通过任意时刻的转子位置和转速信号,可得出该时刻运行状态,最终由直线方程求得反电动势波形.该反电动势模块通过S函数构建.图2为BLDCM本体模块结构图.
2.2 控制器模块
控制器模块由转速环、电流环和参考电流模块3部分组成,主要用来实现转速和电流的负反馈调节,并能通过接收电机的运行状态信息,对功率电子器件发出通断指令,实现系统的稳定调节.
速度调节采用PID控制,将参考转速和实际转速的差值作为模块的单端输入,三相参考电流的幅值作为模块的单端输出.PID控制的特点是只需对控制器参数,即对比例系数KP、积分系数KI和微分系数KD进行调整,就可获得满意的结果.PID控制系统由PID控制器和被控对象组成,由设定目标值r(t)与实际输出值y(t)构成的控制偏差e(t),将此偏差的比例,积分和微分通过线性组合构成控制量,对受控对象进行控制.控制器控制方程为e(t)=r(t)-y(t),控制器时域输出u(t)方程为

PID控制器的参数整定是控制系统设计的核心内容.整定的目的就是设法使控制器的特性和被控对象配合好,以便得到最佳控制效果.速度PID控制器如图3所示.输出端加入的Saturation饱和限幅模块,旨在将输出的三相参考相电流的幅值限定在要求范围内.

图2 BLDCM本体模块Fig.2 Module of BLDCM
电流调节模块以三相参考电流和三相实际电流作为输入,通过电流滞环原理,使得实际电流跟随给定电流调节,输出PWM逆变器的控制信号.逆变器下桥臂控制信号是通过对上桥臂控制信号直接取反得到的,当实际电流小于参考电流且偏差达到滞环宽度正边缘时,对应相正向导通,负向关断,实际电流升高;当实际电流大于参考电流且偏差达到滞环宽度负边缘时,对应相正向关断,负向导通,实际电流降低.滞环环宽的恰当选择可限制实际电流的变化,使其不断跟踪参考电流的波形,完成电流闭环控制.
参考电流模块以电流幅值信号Is和位置信号作为输入,通过S函数编程,输出三相参考电流.该模块直接与电流滞环模块连接,将输出作为与实际电流比较的参考电流,进行电流滞环控制.
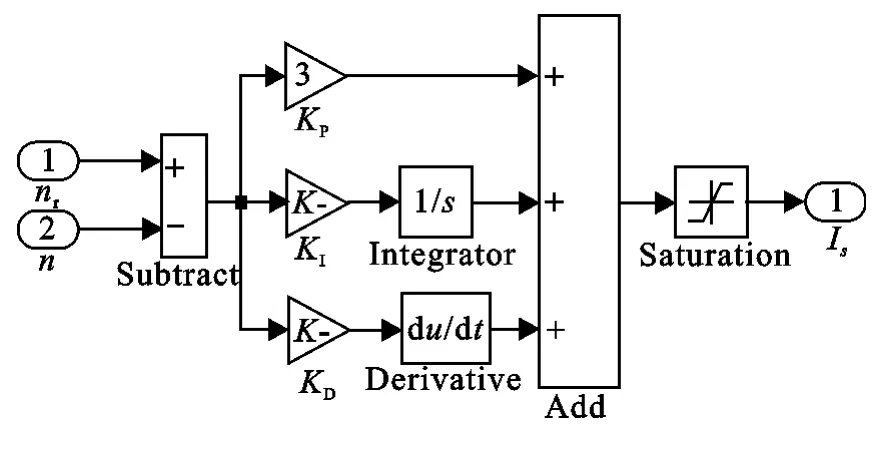
图3 速度PID控制模块Fig.3 Control module of PID speed
2.3 电压逆变器模块
在搭建的BLDCM仿真模型中,逆变器模块兼具电子换相和PWM电流调节的作用.模块选用三相全桥IGBT,每个桥臂上的一个功率器件即相当于直流电动机的一个机械换向器,根据电流控制模块所发出PWM信号,按某一频率顺序导通和关断,并给出对应的三相端电压信号.
3 仿真结果
BLDCM参数设置:额定电压220V,极对数p=5,额定转速1 500r/min,定子相绕组R=1Ω,定子相绕组自感与互感之差L-M=0.026 5 H,转动惯量J=0.000 5,阻尼系数B=0.000 2N·m·s/rad,采样周期T=0.000 1s,PID控制器的3个参数KP=3,KI=0.001,KD=0.008,系统空载起动,待系统稳定后,通过仿真模型中设定的方波信号,系统在0.3s时突加TL=2N·m的负载,在0.6s时撤去,观察系统各个模块的输出波形,以此考察BLDCM仿真模型的静态、动态特性.还可人为改变PID参数,通过多组试验,观测波形的变化状况总结出PID各参数取值对系统的影响,最终选定最优的PID参数.如图4,5分别为BLDCM的转速和转矩的仿真曲线.
在n=1 500r/min的参考转速下,由图4的转速波形可知,通过人为加减负载,转速无较大波动,基本实现平稳过渡,运行稳定,达到无静差控制的目的.由图5转矩响应波形可知,不考虑系统的摩擦转矩,转矩在系统起动阶段保持恒定,因此没有导致转矩和相电流产生较大的冲击,当系统空载进入稳速阶段后,电磁转矩的均值变为零,当在0.3s突加负载后,由于电流换相和电流滞环控制器的频繁切换,转矩产生较大的脉动.综合各响应波形的快速性和稳定性可得,系统具有良好的静态、动态特性.表明文中对BLDCM的仿真建模采用了合理的控制系统并且该建模方法实用有效.

图4 转速响应曲线Fig.4 Curve of speed
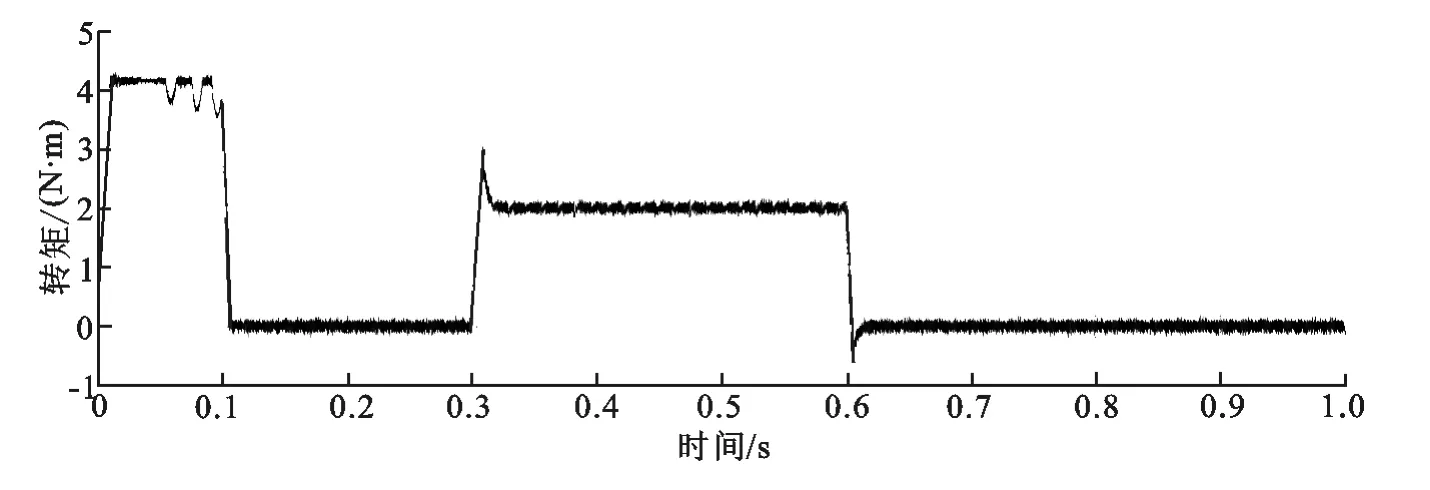
图5 转矩响应曲线Fig.5 Curve of torque
4 结束语
通过对BLDCM工作原理及数学模型的分析,在Matlab/Simulink环境下,构建出一种新型的采用双闭环调控的BLDCM系统仿真模型,并对其模块特性及整体性能进行了研究.由仿真结果可知,系统输出波形符合理论分析,且在转速环加入PID控制器,使系统的调节具有很强的自适应能力和鲁棒性,对实际控制具有重要的指导意义.利用计算机仿真的优越性,在BLDCM仿真模型中,可以方便地进行功能模块的修改和替换,实时考察系统的静态、动态特性.因此,该仿真建模方法不仅便于分析设计BLDCM控制系统,也为电机控制系统的设计和调试提供了新的思路.
[1] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009:25-56.XIA Changliang.Brushless DC motor control system[M].Beijing:Science Press,2009:25-56.
[2] 张博,孙宁,朱宇军,等.无刷直流电机控制系统的几种控制补偿策略[J].西安工程大学学报,2008,22(3):315-318.ZHANG Bo,SUN Ning,ZHU Yujun,et al.Study on the several control &compensate tactics on the system of brushless direct current motor[J].Journal of Xi′an Polytechnic University,2008,22(3):315-318.
[3] 王晋,陶桂林,周理兵,等.基于换相过程分析的无刷直流电动机机械特性的研究[J].中国电机工程学报,2005,25(14):141-145.WANG Jin,TAO Guilin,ZHOU Libing,et al.Researth on the mechanical characteristics of brushless DC motor based on the analysis of phase commutation[J].Journal of China Motor Engineering,2005,25(14):141-145.
[4] 张德丰,杨文茵.MATLAB仿真技术与应用[M].北京:清华大学出版社,2012:129-199.ZHANG Defeng,YANG Wenyin.Technology and application of MATLAB simulation[M].Beijing:Tsinghua University Press,2012:129-199.
[5] 叶长青,尹华杰,赵海波.无刷直流电动机驱动系统 Matlab仿真建模及模型中S函数的实现[J].微电机,2008,41(10):90-94.YE Changqing,YIN Huajie,ZHAO Haibo.Matlab simulation and modeling of BLDCM drive system and its S-function programming[J].Micro-motor,2008,41(10):90-94.
[6] 周艳青,黄常抒.基于 Matlb无刷直流电机控制系统的新型建模仿真[J].防爆电机,2008,43(6):27-31.ZHOU Yanqing,HUANG Changshu.A new modeling simulation of brushless DC motor control system based on Matlab[J].Explosion-proof Motor,2008,43(6):27-31.
[7] 朱剑波.无刷直流电机控制系统的仿真与分析[J].理论与方法,2013,32(12):25-30.ZHU Jianbo.Simulation and analysis on BLDCM control system[J].Theory and Analysis,2013,32(12):25-30.
[8] 李博,马训鸣,霍建锋.基于PID的变量马达恒速控制系统研究[J].西安工程大学学报,2014,28(2):231-234.LI Bo,MA Xunming,HUO Jianfeng.The constant speed control system of variable displacement motor based on PID control technology[J].Journal of Xi′an Polytechnic University,2014,28(2):231-234.
[9] 刘海珊,陈宇晨.无刷直流电机PID控制系统仿真及实验研究[J].系统仿真学报,2009,21(16):5157-5160.LIU Haishan,CHEN Yuchen.Simulation and experiment study of BLDCM PID control system[J].Journal of System Simulation,2009,21(16):5157-5160.
[10] 王宗培,陈敏祥.直流电动机新论[J].微电机,2012,45(1):1-6.WANG Zongpei,CHEN Minxiang.New theory of DC motor[J].Micro-motor,2012,45(1):1-6.
[11] 张琛.无刷直流电机原理及应用[M].北京:机械工业出版社,2004:14-20.ZHANG Chen.Principle and application of brushless DC motor[M].Beijing:Machinery Industry Press,2004:14-20.
