一种高速、高压PIN开关驱动器的设计
2015-05-17高火涛张华君
汪 亮,高火涛,谭 莹,张华君
(武汉大学电子信息学院,武汉 430072)
0 引言
PIN二极管开关具有高速、高功率的特点,广泛应用在通信对抗、通信等电子系统中,代替机械式开关,承担不同通道之间的高速切换任务[1]。小信号PIN开关的切换速度可以做到纳秒级,开关频率也可以做得很高;大功率开关由于受到驱动器的限制,开关的切换时间往往很慢,一般达20 μs~50 μs。国外 PIN 二极管开关的研制起步早,市场上成熟的产品较多。在大功率半导体开关领域,美国Comtech PST Corp的产品性能比较突出,产品的频率范围涵盖高频、射频和微波,产品功率从15 W~4 000 W不等。高频段方面,该公司提供了一款大功率PIN二极管开关HH20-021,它的使用频率范围是1.5 MHz~30 MHz,输入功率达1000 W,切换速度达50μs,开关最大工作频率可达2 kHz。国内PIN二极管开关的研究起步晚,市场上成熟的产品少,对于不同的应用场合,需要自行设计PIN二极管收发开关,PIN开关驱动器是高频大功率开关设计的难点之一。
本文所设计的驱动器对应的天线收发开关,应用于高频雷达领域[2],天线的工作频率为2 MHz~30 MHz。开关要求切换速度低于10 μs,工作频率达2 kHz,承受功率达300 W。目前,在国内外找不到符合要求的产品,需要重新设计合适的开关驱动器。
1 驱动器电路原理与分析
驱动器的输入端通常接入晶体管-晶体管逻辑(TTL)控制电平(逻辑1=+5 V;逻辑0=0 V),输出端电压受输入端控制,可实现两种极性的直流电压的切换。通过开关电路的功率到电压的换算,在开关截止时,驱动器需要输出240 V的反向截止电压,在开关导通时,驱动器需要输出-12 V的正向导通电压。根据以上要求,可以采用三极管互补对称电路[3]来实现驱动器的设计。驱动器的电路原理图如图1所示,TP为TTL控制信号接入点,B1为驱动器输出点,7404在电路中起波形整形的作用,将不规则的输入波形整形为方波,MC1488为电平转换器,将TTL电平转换成RS232电平(逻辑1=-3 V~-15 V;逻辑0=+3 V~+15 V),用来驱动下一级的三极管。在电路中Q1、Q2、Q4为耐高压的三极管,Q3为普通三极管。当TP为高电平时,Q1导通,Q2饱和,Q3和Q4截止,B1输出240 V截止电压;当TP为低电平时,Q1和Q2截止,Q3和Q4饱和,B1输出-12 V导通电压。
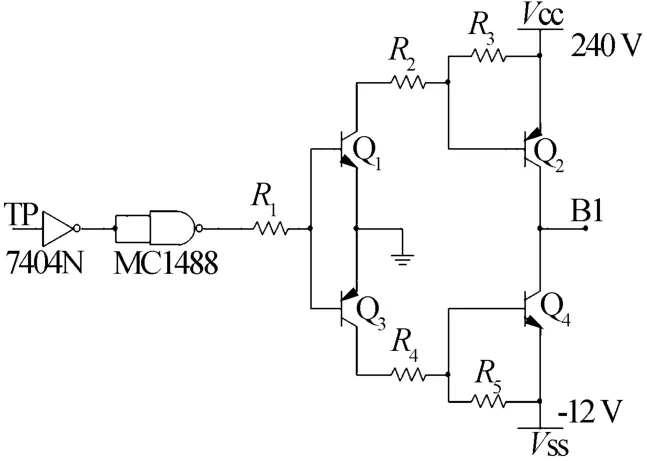
图1 驱动器电路原理图
在驱动器的设计中,三极管工作点非常重要,三极管是否工作在饱和区,可以通过基极电流Ib和集电极饱和电流Ic(sat)的关系来确定。硅管类的三极管发射结的导通电压Vbe一般为0.6 V,当图1中Q2工作在饱和状态时,设B1处接入的负载为Rc,那么Ic(sat)大小可由式(1)近似求得,Ib可由式(2)来计算。当Ib和Ic(sat)满足式(3)时,Q2工作在饱和区,式中β为三极管直流电流增益。实际应用中,R3通常取10 K左右,由式(1)~式(3)可得R2的取值范围,见式(4),确定R2、R3的阻值后,Q2的工作点就可以确定了。




在电路实测过程中,本驱动器存在两大问题:第一,电路工作不稳定,开关工作时带有很明显的电流冲击声,三极管Q2发热严重很容易烧坏,另外驱动器工作频率很低,只有1 kHz左右;第二,输出端的电平切换速度很慢,尤其反映在开关的截止时间上。要想克服以上问题,必须将电路加以改进。
2 改进型驱动器电路
经分析可知,问题一产生的原因是:当TP下跳沿来临,Q2由饱和状态切换为截止,Q4由截止状态切换为饱和,因为Q2、Q4的工作电压不对称,它们切换状态所需的时间不同,所以Q2在Q4饱和前还没来得及截止,此时Q2内部会产生很大的电流冲击,这种电流冲击对电路是有害的,是造成电路不稳定的主要原因。第二个问题产生的原因是:Q2由截止切换至饱和时,基极电流太小,Q2无法快速进入饱和状态,导致了驱动器切换速度过慢。
电路的具体解决方案是:在驱动电路前级加入延时电路,让Q4的切换时刻滞后,这样Q2内部就不会有电流冲击,从而解决电路稳定的问题。要想调节Q2基极电流有两种方法:方法一是调节三极管Q2基极和集电极的限流电阻,加快PN结充放电时间,缩短Q2进入饱和所需的时间,从而改善驱动切换速度;方法二是加入加速电容。图2为改进后的驱动器电路原理图。在实际测试中仅仅调节Q2基极和集电极的限流电阻,不能明显改善驱动器的切换速度,在R2上并联一个加速电容[4]后,可以很好地改善驱动器切换速度。
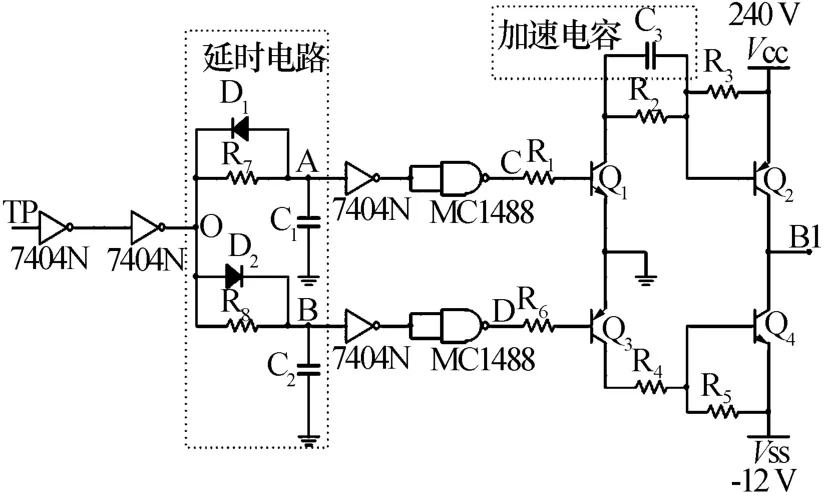
图2 改进后驱动器电路原理图
2.1 延时电路的原理
延时电路原理图如图2所示,电路通过RC电路实现输入信号的延时,利用二极管的单项导通特性来实现不同时段的延时[5],电路中O、A、B三点的时延关系如图3所示。当O点上调沿来临时,D2导通D1截止,此时D2和R8的并联电阻非常小,D1与R7的并联电阻接近R7,C2比C1的充电速度更快,B点比A点更快到达高电平。当O点下降沿来临时,D1导通D2截止,此时D1和R7的并联电阻非常小,D2与R8的并联电阻接近R8,C1比C2的充电速度更快,A点比B点更快到达高电平。
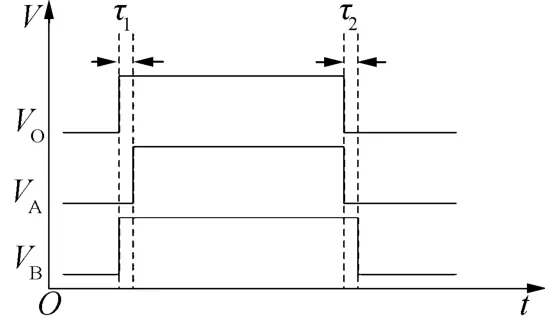
图3 O、A、B三点的时序关系图
在O点波形上跳沿时,根据相关电路原理,A点电压变化满足式(5)。假设初始条件VA(0)=0,可解A点电压的表达式见式(6),式中R7与C1乘积为时间常数τ1,通过改变R7或者C1,可以达到调节O点上升沿时刻A点对应的延时。同理,当O点由VH跳变为低电平时,A点波形基本无时延,而VB的电压满足式(7),通过调节R8或者C2,可以调节O点下降沿时刻B点对应的延时τ2。加入延时电路后,消除了Q2在状态切换时内部产生的电流冲击,从而解决了电路的稳定性问题。



2.2 加速电路
如图4所示,驱动器的输出端波形在时间上往往滞后于输入端的控制信号,这一现象称作驱动器的脉冲响应[4]。图中tPLH为截止时间,tPHL为导通时间,它们反映了驱动器的响应速度。td为线路延时时间,通常比较小。tr与tf分别为输出波形的上升、下降时间,它们取决于晶体管的特征频率fT,还与晶体管工作点有关。ts为存储时间,由三极管存储效应引起,与晶体管工作点有关。在晶体管共发射极应用时,tr、tf、ts可由式(9)~式(11)来确定。
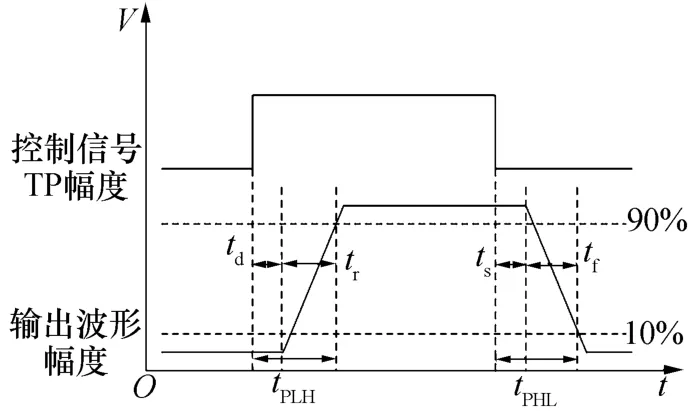
图4 驱动电路的脉冲响应



式中:k1、k2、k3是与晶体管放大系数、截止频率有关的常数;IBF为晶体管基极电流;IBR为晶体管反向基极电流;ICS为集电极电流;hFE为晶体管共射级的电流放大系数。分析可知,tr与IBF成反比,tf与IBR成反比,ts与IBR成反比与IBF成正比。要想提高驱动器的响应速度,必须合理地增大晶体管的IBF和IBR,最直接的办法就是减小基极限流电阻。但在实际测试中,减小基极限流电阻对响应速度的改善不是很明显,同时基极限流电阻太小,会使晶体管工作在过饱和状态,增大静态功耗。面对以上问题,可以通过加速电路[6]来克服。
为了加快负载端电压的变化率,通常会在驱动电路中的电阻两端并联一个电容,这个电容称为加速电容。如图2所示,在电阻R2两端并入加速电容C3后,就构成了一个局部加速电路。当输入由低电平跳变到高电平时,因为电容两端电压不能跳变,电容C3将电阻R2短路,此时Q2基极会产生很大的正向电流,使Q2快速进入饱和状态。Q2饱和时,给C3充电,当Q2截止时,基极过量的电荷可以通过电容迅速释放,减小存储时间,实现加速作用。在状态切换的过程中,Q2基极电流的变化如图5所示,其中IBDC为基极静态电流。加速电容大小和晶体管的型号以及驱动电路工作的频率都有关系,对于一般的晶体管来说,容量约为数十皮法至数百皮法之间,具体的容量要通过实测电路的输出波形来确定。
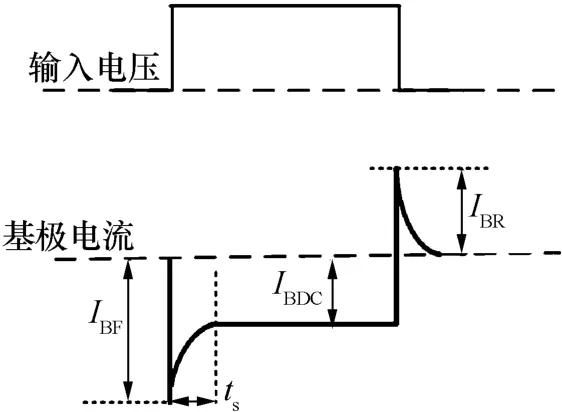
图5 Q2基极电流波形
3 实验结果及分析
通过加入延时电路,驱动器可以稳定地工作在2 kHz处。在没有加入加速电容之前,驱动器工作在1 kHz处的响应速度如图6所示,驱动器的截止时间为 36 μs,导通时间为 6.8 μs,驱动器的截止时间明显过慢,根本就不能胜任高速PIN开关的要求。引入加速电路以后,驱动器的截止时间明显缩短,图7为引入加速电路之后驱动器的速度响应实测结果。从图中可以看出,驱动器的截止速度为5.6 μs,导通时间为8 μs,可以很好地满足大功率短波天线收发开关的高速要求。
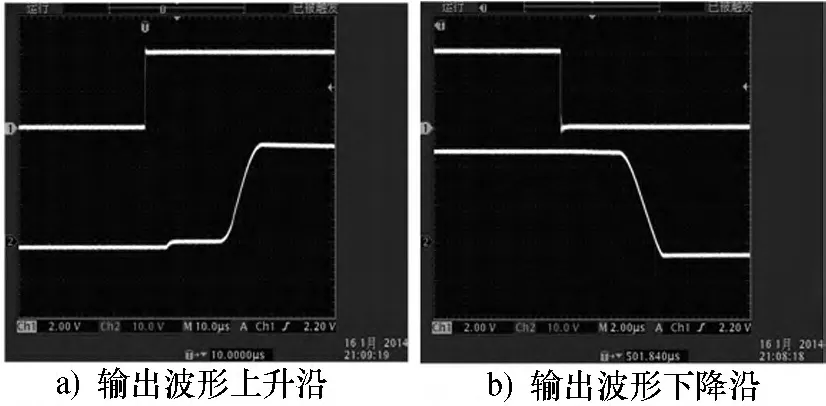
图6 未加入加速电容时开关的响应速度
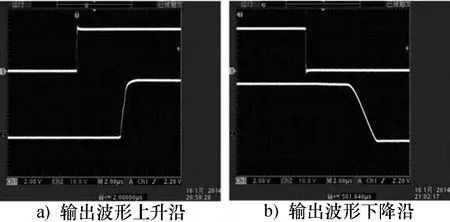
图7 加入加速电容时开关的响应速度
4 结束语
实验证明:加入延时电路及加速电路,可以很好地解决短波天线收发开关面临的工作不稳定、开关反应速度慢等问题。在设计开关驱动电路中,要合理地选择三极管的静态工作点,防止三极管工作在过饱和点,增加电路的静态功耗。另外,选择特征频率较高的晶体管,可以提高驱动器的响应速度。本文介绍的开关驱动器,具有较高的直流截止电压(240 V)和快速的开关响应速度(截止时间为5.6 μs,导通时间为8 μs),可以很好地满足大功率、高速要求的天线收发开关。
[1]顾卫东,徐 健.高速、高压、高频PIN管开关驱动器设计[J].通信对抗,2005(4):45-48.Gu Weidong,Xu Jian.A design of high speed,high voltage,high frequency PIN switch driver[J].Communication Countermeasures,2005(4):45-48.
[2]康华光.电子技术基础模拟部分[M].5版.北京:高等教育出版社,2006.Kang Huaguang.Electronic technology foundation for analog parts[M].5th ed.Beijing:Higher Education Press,2006.
[3]官清雄,占蜡民.一种高压大电流PIN管开关驱动器的设计[J].电讯技术,2011,51(2):102-106.Guan Qingxiong,Zhan Lamin.Design of high-voltage and high-current PIN switch driver[J].Telecommunication Engineering,2011,51(2):102-106.
[4]陈爱华,陈永任.一种PIN开关高速驱动器的设计[J].微电子学,2006,36(4):492-494,497.Chen Aihua,Chen Yongren.Design of a high-speed driver for PIN switches[J].Microelectronics,2006,36(4):492-494,497.
[5]叶红松,李 洋,杨 阳.一种大电流高速PIN驱动器的设计与实现[J].微电子学,2009,39(1):81-84.Ye Hongsong,Li Yang,Yang Yang.Design and implementation of a high-current and high-speed PIN switch driver[J].Microelectronics,2009,39(1):81-84.
[6]顾颖言.PIN管控制电路功率容量的确定[J].现代雷达,2005,27(3):60-64.Gu Yingyan.Establishing the power capability for p-i-n diode control circuits[J].Modern Radar,2005,27(3):60-64.
[7]张晓发,王 超,袁乃昌,等.UHF宽带线性功率放大器设计[J].现代雷达,2006,28(10):79-81,84.Zhang Xiaofa,Wang Chao,Yuan Naichang,et al.Design of UHF broadband linear power amplifier[J].Modern Radar,2006,28(10):79-81,84.
[8]吴世才,杨子杰,石振华.高频地波雷达宽带收发开关[J].武汉大学学报:理学版,2001,47(5):554-559.Wu Shicai,Yang Zijie,Shi Zhenhua. Wide-band T/R switch for HF ground wave radar[J].Journal of Wuhan University:Natural Science Edition,2001,47(5):554-559.
[9]谯 劼.大功率高隔离PIN二极管收发开关电路设计与软件仿真研究[D].成都:电子科技大学,2011.Qiao Jie.The design and simulation of high-power and highisolation PIN T/R switch circuits[D].Chengdu:University of Electronic Science and Technology of China,2011.