靶场脉冲测量雷达组网技术
2015-05-17卢雪林程望东
卢雪林,程望东
(南京电子技术研究所,南京 210039)
0 引言
目前,雷达组网技术可以应用于靶场测量。在我国的靶场测量雷达的链路中,执行测量任务时,一般分布多个站点,每个站点的雷达单独收发,并负责测量任务的某一段,若干套雷达设备“串行”起来,以“接力”的形式完成整个测量任务,即各个雷达按照任务弧段要求一段接一段相互交叠跟踪。在雷达链跟踪方式下,各个雷达采用相参应答方式工作,且工作载频、脉冲宽度、雷达重复周期等基本参数相同[1]。因此,执行测量任务的多站雷达同时进行跟踪,多个雷达应答回波信号同时出现的情况下,会导致信号之间相互干扰,影响雷达的捕获和跟踪,甚至导致跟踪目标的丢失[2]。
雷达组网采用先进的时频同步技术可协同多站雷达同步工作。采用多站雷达测距和测速算法不仅可以提高雷达完成任务的可靠性,还可以提高测量精度。针对目前雷达链工作中易出现的问题,本文提出了一种靶场测量雷达组网工作的方法,并分析了该方法的优点以及需要解决的关键技术,并对组网雷达的定位精度几何分布(GDOP)进行了仿真。
1 靶场雷达组网方案
1.1 靶场雷达组网工作原理
靶场脉冲测量雷达组网技术就是将多套靶场脉冲测量雷达的发射和接收系统组成发射和接收网络,根据任务特点统一进行发射和接收网络资源的配置、管理和运用。
雷达系统组网以一套主动雷达、两套被动雷达和一套中心控制系统为例,其中每个雷达配置高性能的频率基准。系统工作原理框图如图1所示。
控制中心针对任务特点对发射网络和接收网络进行集中控制和管理,可控制每个站雷达发射机的开关。控制中心控制主动雷达发射机开机,其他站雷达的发射机处于备份状态,主动雷达发射机和接收机共用一部天线,被动雷达1和被动雷达2共用主动雷达的发射机。
这样设计的优点是减少发射机同时开机,可避免多台发射机同时触发应答机。应答机在发射信号的触发下,产生应答信号向各雷达辐射,各雷达接收信号后,将处理后的测量结果传给控制中心,由控制中心再进行数据融合处理。
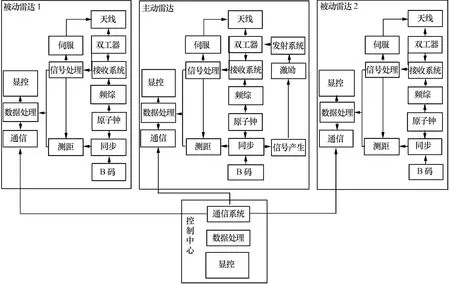
图1 系统工程原理图
1.2 靶场雷达组网关键技术及算法
1.2.1 关键技术
组网雷达的时频同步技术是其主要关键技术之一,它完成雷达系统时间同步、频率相位同步、空间同步、精确三维定位功能。时间同步由信号处理分系统实现;空间同步指各雷达天线必须同时照射到同一空间目标;频率相位同步指各雷达的接收机和发射机必须工作在相同的频率[3-4]。
时频同步系统提供了高精度的定时,决定了组网雷达的信号融合和实时数据融合;高精度的频率和相位同步决定了该雷达的抗地杂波、海杂波和云雨杂波的高性能指标;高精度的站址定位精度确保了该雷达的三角定位精度。
组网雷达时频同步系统为适应现代战争中复杂电磁环境的需要,选择以微波、光纤链路为主要通信信道组成自主同步系统,GPS作为辅助同步手段。
1.2.2 关键算法
靶场组网雷达关键算法包含测距和测速算法等,下面以1个发射站和1个接收站为例介绍测距和测速算法。
1)测距算法
多站测量首先测量延时,然后根据球面解算距离,测距原理如图2所示。
根据图2可以解算出目标的距离,即

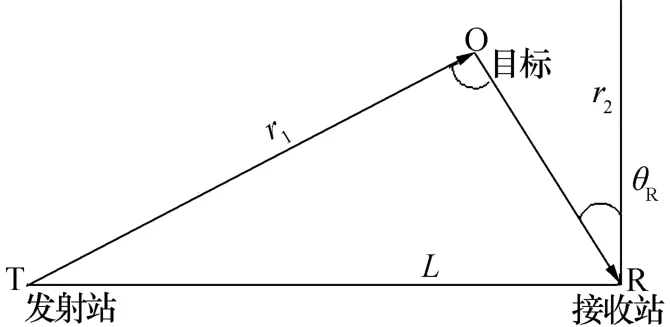
图2 雷达双站测距原理
2)测速算法
单站雷达只能测量目标的径向速度,而多站雷达可以测量目标在测量平面内的速度。多站测量仍然先测量目标的多普勒频率,再根据几何关系解算,图3为双站测速几何关系图。
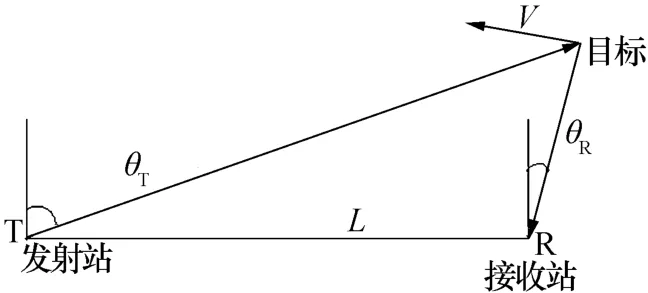
图3 雷达双站测速原理
根据图3可以解算出目标在双站平面内的多普勒值,即

2 靶场组网雷达的优点
靶场脉冲测量雷达组网可以改善脉冲测量雷达的精度,还能提高完成任务的可靠性。靶场雷达组网具体优点如下所述。
2.1 改善定位精度
雷达定位精度受到波束宽度的限制,当雷达跟踪远距离目标时,角度测量误差会导致目标横向定位产生较大的误差[5],原理如图4所示。
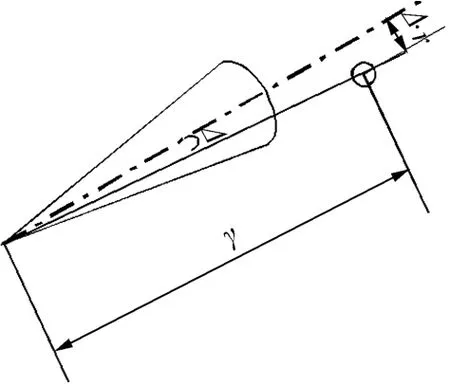
图4 横向定位与测角精度的关系
当目标径向距离为r时,测角精度为Δ,则横向定位误差为Δ·r,当r=100 km,Δ=1 mrad时,则横向定位误差为100 m。
采用多套雷达组网,可以采用距离三角关系定位[2],由于单套雷达测距精度很高,可以保证在5 m以内。因此,三角定位可大大提高测控网的定位精度。
2.2 提高测距和测速精度
雷达测速公式中因相参频率源不稳定引起的误差为

式中:f0为工作频点;dr为频率源短期稳定度。从中可以看出测速精度依赖于雷达晶振频率短期稳定度和长期频率稳定度。
雷达测距公式中因基准频率引起的误差为

式中:Δf/f为基准频率不准(目前一般晶振准确度达到10-7或10-8);Rmax为最大作用距离。可见测距精度依赖于雷达晶振频率的长期稳定度。
目前,靶场测量雷达都配备了各自的频率源,导致多套雷达的测量精度离散性较大,降低了多套雷达测量的一致性。雷达组网采用高稳定的频率源系统和先进的时间同步技术,可以大大提高各雷达测量结果的一致性,提高测控系统的测距和测速精度。
2.3 改善避盲时的精度
脉冲雷达工作时都存在发射盲区和近地盲区,单台雷达为了连续跟踪目标,会进入避盲状态,此时雷达根据目标距离发射避盲移相序列脉冲串,由于此种脉冲串在时间上非等间隔,将导致测距滤波器的响应误差增大,降低测距精度。避盲时序如图5所示。
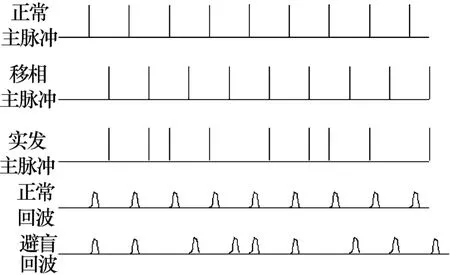
图5 脉冲雷达避盲时序图(N=2)
当采用雷达组网技术,发射雷达进入盲区时,其他被动接收雷达不会同时进入盲区。当发射雷达进入盲区时,可以不进行避盲工作,正常发射,这样被动雷达正常接收应答回波信号,进行等间隔处理,保持高精度的测量。
2.4 减小动态滞后误差
由于目标运动相对于雷达有速度、加速度和更高阶的导数分量,距离跟踪系统会产生滞后误差,动态滞后误差可以写为

通常靶场测量雷达在进行接力测量时,测量数据主要依赖于最接近目标的某部雷达,目标在飞过该雷达仰角最高点附近会产生最大加速度点,导致雷达产生相当大的动态滞后误差。此项误差一般为靶场测量雷达的最大测量误差项。当雷达采用组网技术,测量数据可选择动态滞后误差较小的测量雷达,减少动态滞后对测量精度的影响。
2.5 提高任务可靠性
在靶场测量雷达的链路中,对于某一套雷达来说,发射机的故障率较高,不能长时间连续工作,执行测量任务的可靠性和连续性也就降低了,尤其是当这套雷达位于特殊位置时。例如在测量船上,雷达出现故障时不易修理,发射机的故障就易导致测量任务失败。
在这样的情况下,靶场测量雷达在执行测量任务时,如果采用被动式跟踪。即在一定的条件下,某一站点雷达只开发射机,周围相邻的若干站点的雷达只开接收机,这样就可以提高整个雷达测量链路的可靠性,从而提高测量任务的可靠性。
3 仿真分析
对靶场雷达组网进行仿真,观察定位精度几何分布情况。假设在同一水平面内,基线长度不同的两雷达组网,进行GDOP仿真。
图6为基线站间距离40 km,距离GDOP分布图。图7为基线站间距离25 km,距离GDOP分布图。
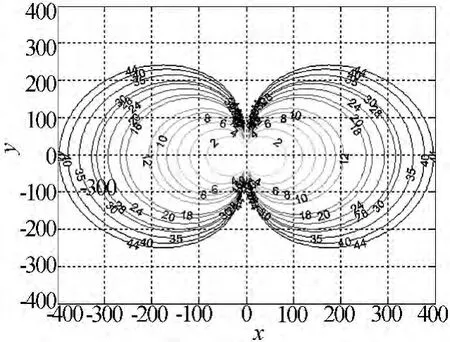
图7 短基线GDOP仿真图
从图中可发现,两站法线方向测量精度较低,长基线精度优于短基线。因此在执行任务时,需要根据目标飞行轨迹,选择合适的雷达站点位置。
4 结束语
靶场脉冲测量雷达进行组网,可以提高测量精度和任务可靠性,同时实现数据共享,资源合理配置、集中管理,避免多任务冲突,对提高靶场测控系统的性能具有重要的意义。
[1]陈大庆,刘 丹,张 哲,等.临近空间飞行器地面雷达组网优化仿真分析[J].飞行器控制学报,2012,12(6):27-31.Chen Daqing,Liu Dan,Zhang Zhe,et al.Optimized simulation analysis of networked ground-based radars for near space vehicles[J].Journal of Spacecraft TT&C Technology,2012,12(6):27-31.
[2]Willis N J.Bistatic Radar[M].Raleigh,NC:SciTech Publishing Inc.,2005.
[3]卢雪林.双多基地雷达时频同步方法研究[J].现代雷达,2010,32(增刊):9-11.Lu Xuelin.Study on time and frequency synchronization system[J].Modern Radar,2010,32(Supplement):9-11.
[4]刘炳奇,肖文书.一种多基雷达接收信号相参处理的方法[J].现代雷达,2009,31(5):30-34.Liu Bingqi,Xiao Wenshu.A coherent signal processing method for multisite radar system[J].Modern Radar,2009,31(5):30-34.
[5]张小宽,刘尚钞,张晨新,等.隐身目标的双基地雷达探测技术[J].系统工程与电子技术,2008,30(3):444-446.Zhang Xiaokuan,Liu Shangchao,Zhang Chenxin,et al.Study on the detection technology of bistatic radars for stealthy targets[J].Systems Engineering and Electronics,2008,30(3):444-446.