一种适用于数控机床上下料的工业机器人
2015-05-15何敏佳江文明
何敏佳,江文明,黄 江
(广州数控设备有限公司,广东广州 510530)
0 引言
工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的重要的现代制造业自动化装备[1]。在劳动力成本上升、制造业升级需求越来越强烈的今天,工业机器人作为重要的基础智能装备,对未来工业产品的升级换代,具有十分重要的意义。我国工业机器人市场潜力巨大,国外工业机器人厂商对中国市场非常重视,纷纷设立子公司或者在国内建厂[2]。另一方面,国产工业机器人经过二十几年的研究和发展,取得了长足的进步,培育出沈阳新松、广州数控、安徽埃夫特、南京埃斯顿等国产品牌。据中国机器人产业联盟统计,2014年中国市场共销售工业机器人57 000台,其中国产工业机器人销量超过16 900台。从机械结构方面统计,2014年多关节机器人销量近36 000台,占市场的六成以上,以外资品牌为主。在六关节机器人方面,国产工业机器人仍以6 kg、8 kg、20 kg、50 kg中低载荷为主,与国外进口机器人竞争国内市场。以6 kg、8 kg载荷工业机器人为例,部分国产机器人销售代理价已调整到8~9万元价格区间,国外进口机器人采用国内设厂等本土化经营方针,不断下调机器人售价。
针对轴类、盘类零件上下料加工作业需求,广州数控设备有限公司研制出一种适用于数控机床上下料的工业机器人(型号命名为RJ08A),其具有成本低、结构精简、安装调试快、效率高的特点,在市场上具有广阔的应用前景。
1 RJ08A机器人的结构特点及工作原理
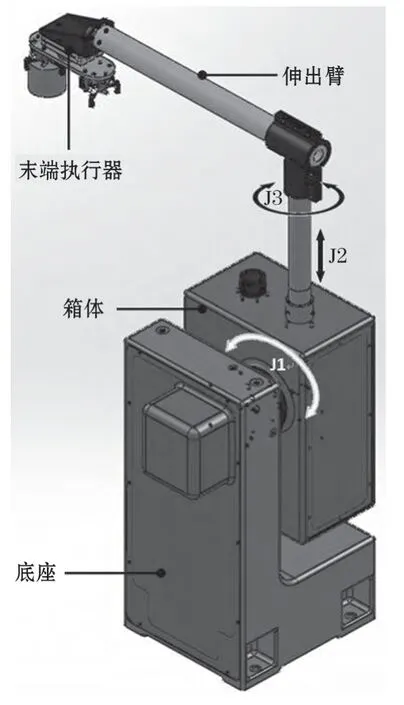
图1 RJ08A机器人本体
RJ08A机器人是一款应用于机床上下料的低自由度机器人。如图1所示,其结构由底座、箱体、伸出臂及末端执行器四个部分组成。考虑到自动化改造过程中的经济性,RJ08A机器人在满足实际使用要求的情况下,采用了三自由度的结构方式,其三个自由度分别为:
(1)底座与箱体之间的旋转运动,运动范围为0°~100°,命名为J1轴;
(2)伸出臂相对于箱体的直线往返运动,运动范围为0~140 mm,命名为J2轴;
(3)伸出臂相对于箱体的旋转运动,运动范围为-100°~100°,命名为J3轴。
J1、J3轴由伺服电机带动摆线减速器运动实现,J2轴由伺服电机带动滚珠丝杠运动实现,伺服电机及摆线减速器均由广州数控自主研制。RJ08A机器人的末端执行机构,由一个旋转气缸及两个气动机械夹爪组成,两个气动机械夹爪分别对应于取料和放料作业。
配合广州数控自主研发的旋转式料仓,RJ08A机器人与数控机床共同组成一套柔性自动化加工单元。该加工单元具体工作流程如下:
(1)运动机器人J1、J3轴,机器人末端卡爪定位于旋转式料仓之上;
从图6可以看出,拉杆在过渡圆角处的应力最大,达到1077.8 MPa。拉杆采用合金结构钢SCM435材料,如果夹具硬度过低,在进行拉力试验时,易造成夹具的破坏[5],根据GB/T 1172-1999[6],将此材料调质至硬度HRC 38左右,抗拉强度可以达到1200 MPa,大于计算所得的最大应力值。拉杆在此载荷作用下,最大变形位于拉杆与连接板螺纹连接的根部,最大变形量仅仅为0.1 mm。
(2)料仓推料装置将待加工零件推送至待夹取位置;
(3)机器人J2轴运动至零件待夹取位置,夹取零件(如图2所示);
(4)运动机器人J1、J2、J3轴,机器人将待加工零件搬运至机床卡爪(如图3所示);
(5)机器人末端的旋转气缸旋转180°将未夹料的空卡爪对准机床卡盘,运动J2轴,实现对已加工完成的零件下料动作;
(6)旋转气缸再次旋转180°,将从料盘处夹取过来的待加工零件对准机床卡盘,通过运动J2轴,完成上料动作;
(7)机器人移出机床,并将已加工件放料到旋转料仓处,同时,机床对待加工零件进行加工。
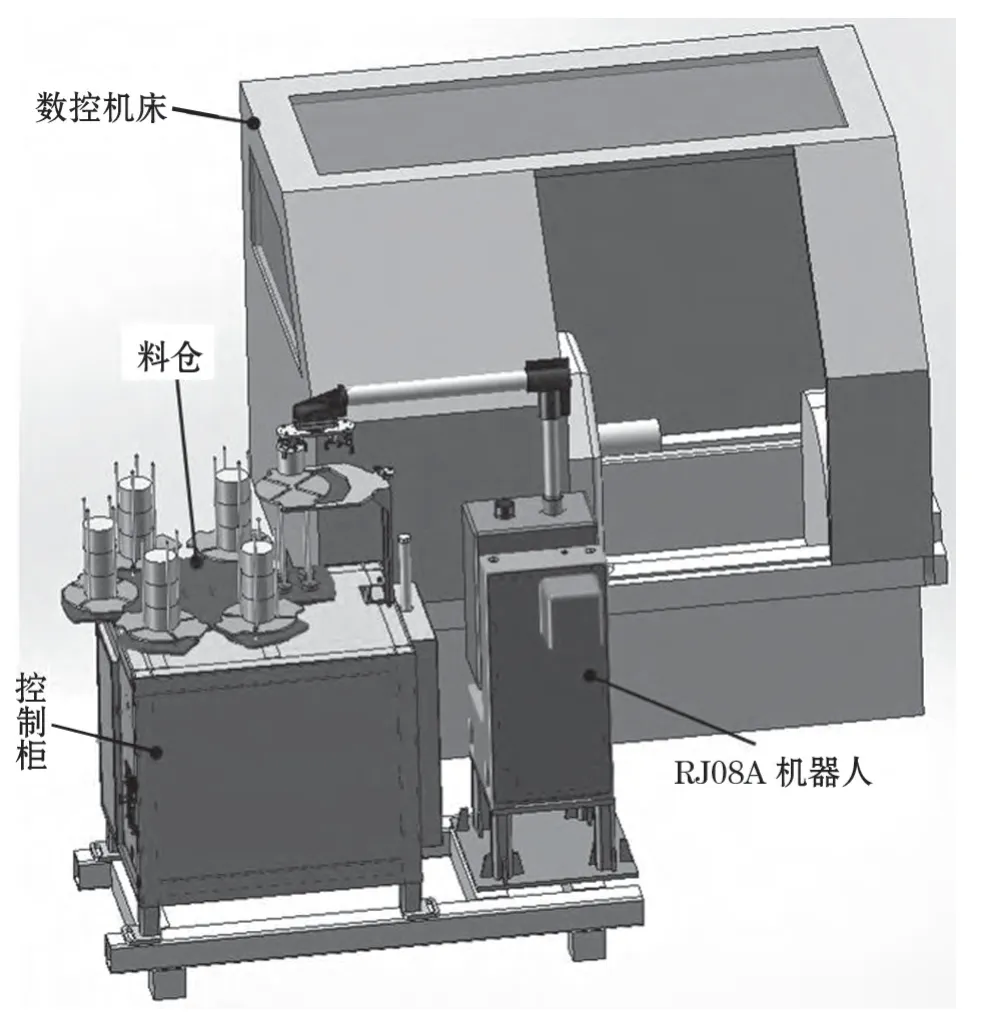
图2 RJ08A机器人从料仓取料
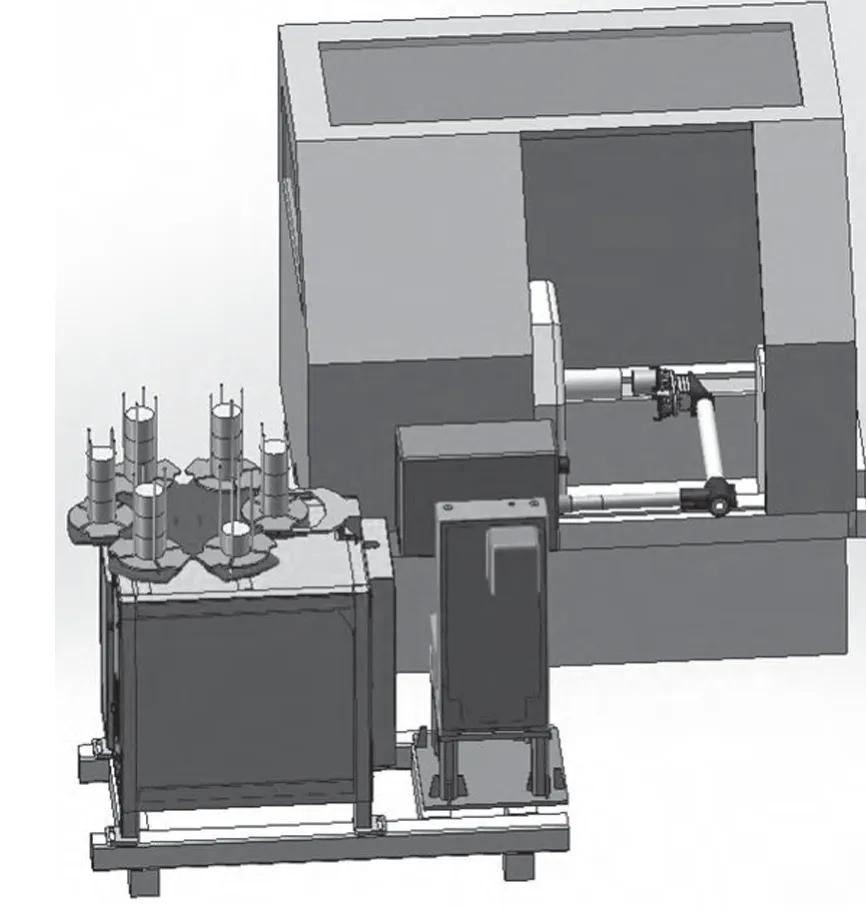
图3 RJ08A机器人运动至机床卡爪位
RJ08A机床上下料机器人,巧妙地利用了J1、J3两个旋转轴来实现对工件的空间定点搬运功能,同时充分地利用了J2直线运动轴来实现对工件的取料、放料、上料、下料功能。相比常规的六关节自由度机器人来说,大大地提高了运动轴的使用效率,降低了机器人和自动化产线改造的成本。从工作节拍上来看,三自由度的RJ08A机器人仅利用了两个旋转轴实现搬运工作,其对控制系统的要求更低,可实现更高的单轴速度运行。另外,其配置的气动机械卡爪,通过简单的夹持手指设计,能够适应不同零件的尺寸要求,基本能满足常见的轴类、盘类零件的加工。
2 RJ08A机器人的应用及性能参数
针对电机零部件、轴承内外圈、齿轮、法兰盘等盘类零件和电机轴、阀芯等轴类零件,RJ08A机器人可实现无人加工。
RJ08A机器人性能参数如表1所示。
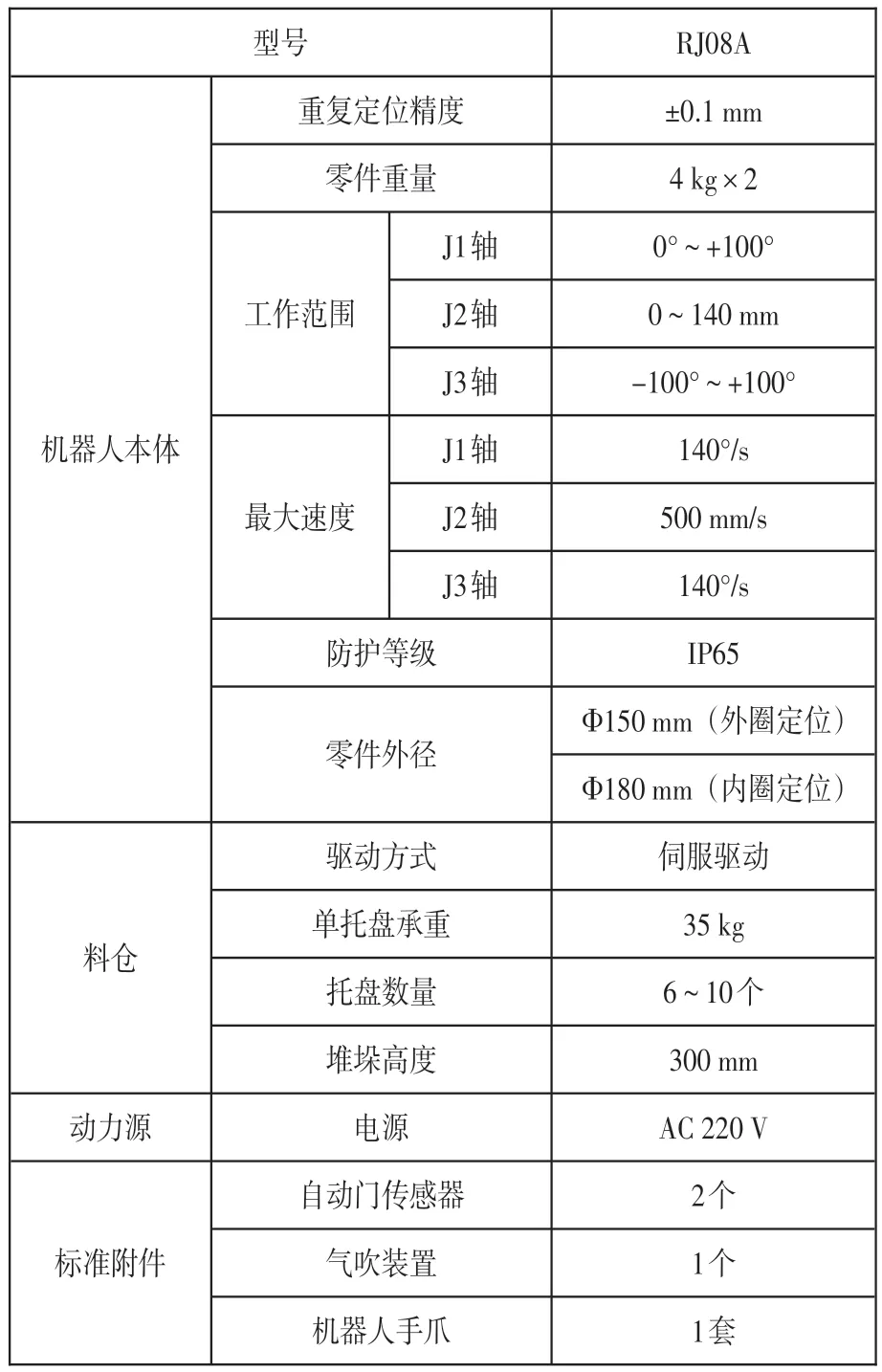
表1 RJ08A机器人性能参数
3 几种机床上下料解决方案优劣势比较
针对机床上下料应用领域,目前市场上可见的主要有两种方式:六关节机器人和桁架机械手。
(1)传统六关节机器人
采用六关节工业机器人给机床自动上下料,可以根据用户实际需求,机器人采用地面或侧挂安装,可通过移动导轨,增加运动行程和工作范围,实现1台机器人给多台机床上下料[3]。

图4 机器人地面导轨移动上下料

图5 机器人地面导轨移动上下料
传统加工的6关节机器人,优势是具有6个自由度,操作灵活,设备适应性较好,多采用精密减速机传动,重复定位精度高,零件加工精度较高,控制技术复杂,机器人价格高,后续维护成本较高。
(2)桁架机械手
桁架机械手,又叫龙门式机器人,隶属于直角坐标机器人,是以XYZ直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带、齿轮齿条为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达,并遵循可控的运动轨迹[4]。
在欧美日等发达工业体系,由高速加工中心和桁架机械手组成的敏捷柔性生产系统已经是主流产品,桁架机械手在高空中输送零件,直接把被加工零件从一台机床输送到另一台机床上,桁架机械手兼有工序间运输和自动上下料及物料回转等辅助功能。由于它输送快捷、精准、柔性,结构相对简捷,便于组合。因而,被机床制造商所器重[5]。
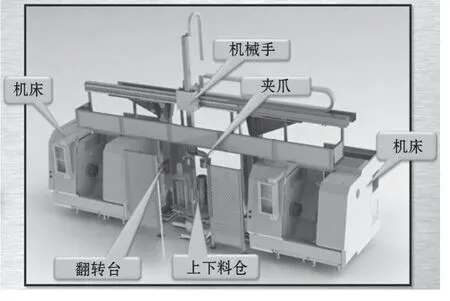
图6 桁架机械手上下料
桁架机械手进行机床上下料,优势是成本低廉,控制系统简单,设备适应性一般,常采用滚珠丝杆、同步皮带、齿轮齿条的传动方式,重复定位精度一般,速度快;局限在于主要应用在多工位单机和短自动性上,对于长自动线其占用的空间位置较大,使用上受到一定限制。
RJ08A机器人,采用广州数控设备有限公司自主研制的减速器、伺服装置、机器人控制器,成本可以控制,采用封装技术实现料仓和机器人生产、运输、安装和调试的一体化,在不移动用户现场机床位置的情况下就可以进行加装改造,节省用户现场调试时间。
三种解决方案优劣比较如表2所示。
4 结语
相比传统的六关节搬运机器人和桁架机器人,RJ08A机器人融合广州数控设备有限公司的伺服控制、减速器、机器人控制器、料仓技术,满足上下料作业的成本、效率、精度需求,预计其在市场上具有广泛的应用前景。
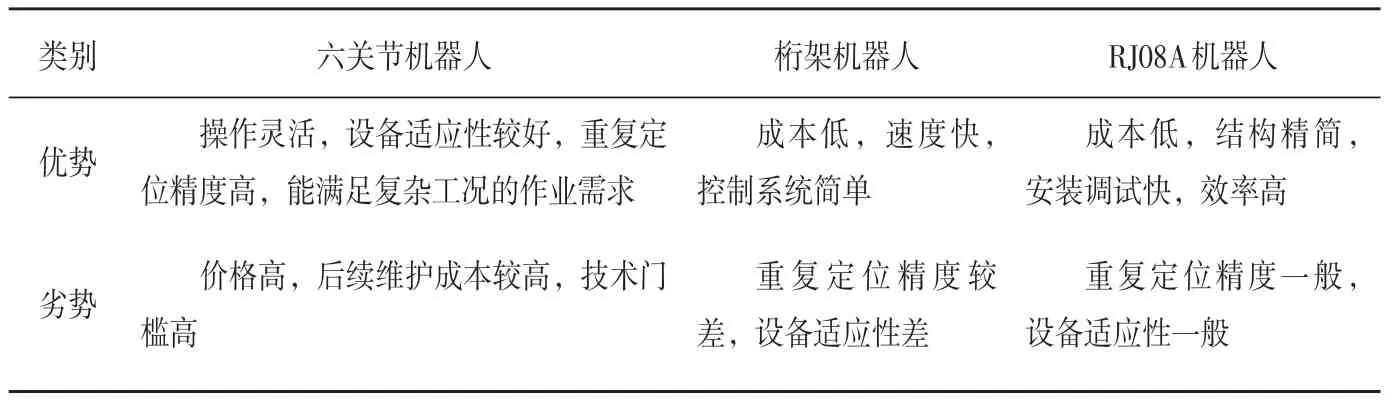
表2 机床上下料解决方案优劣势比较
[1]徐方.工业机器人产业现状与发展[J].机器人技术与应用,2007(5):2-4.
[2]江文明.A公司RB50工业机器人研发项目风险管理研究[D].广州:中山大学,2014.
[3]白东明,陈勇,陈振华.汽车挺柱体铜销的上料装置设计研究[J].机电工程,2014(09):1159-1162.
[4]文怀兴,柳建华,白路,等.基于Trio运动控制器的直角坐标机器人控制系统[J].轻工机械,2009(3):50-51.
[5]权占群,张树礼.桁架机械手及在柔性加工自动线上的应用[J].金属加工:冷加工,2014(12):23-25.
