环保型复合式避障清洁机器人的设计
2015-05-14梁辰滔闫娟张浩陈荣华何涛
梁辰滔, 闫娟, 张浩, 陈荣华, 何涛
(上海工程技术大学机械工程学院,上海 201620)
0 引言
由于工业发展所导致的日趋严峻的环境形势以及大众环保意识的不断提高,传统能源的缺点与环保主义之间的矛盾日趋尖锐,新型能源凭借其清洁、高效、可再利用性强等特点,已经逐渐走入了日常生活生产的各个领域。其中,太阳能作为典型的优秀新型能源,拥有颇具潜力的发展空间和广阔的经济前景。随着科技的不断进步与发展,结合“绿色经济”的主流发展背景,将新型环保能源与智能家居机器装置相结合的设计理念已经在行业中占据了主流意识,为顺应发展趋势,设计出一种能够有效利用绿色环保资源的清洁机器人。
1 清洁机器人整体控制设计方案
清洁机器人整体设计由控制模块、驱动模块、传感器模块以及电源模块等模块以及提供辅助功能的显示器、按钮开关等外围器件组成,各部分由C52单片机控制指挥,协调配合工作。
1)控制芯片。采用STC89C52RC作为控制核心,将各模块与器件联系起来,通过程序的运行控制各个模块的运行与配合。
2)数据显示器。由一组四位共阳数码管组成,用于直观反映机器人的工作参数。
3)电机驱动。由行进驱动和滚刷驱动两部分组成,行进驱动负责控制机器人两后轮的运动,滚刷驱动负责清洁装置部分的滚刷工作。
4)传感器组。由于采用复合式避障方式,故机器人使用超声波传感器与轻触开关组成传感器组,超声波传感器部分负责机器人前方范围内的避障探测,而轻触开关负责机器人四周及后方的避障检测,提高机器人避障的稳定性。
5)供电电源。由一块太阳能电池板以及两块蓄电池组组成,两块蓄电池组分别负责驱动与滚刷电机的供电。
2 清洁机器人硬件系统设计
2.1 控制模块
主控部分以STC89C52单片机为核心,通过I/O信号口与传感器、驱动电路、按键开关等相连接,工作时负责接收来自超声波传感器以及轻触开关传送的数据信息,进行分析处理,然后将具体的工作数据通过数码管直观反馈到用户端,同时通过PWM端使驱动电路对行进电机与滚刷电机以及舵机进行控制,达到避障、清扫的目的。

图1 智能清洁机器人驱动模块原理示意图
2.2 驱动模块
驱动模块的电路设计上采用L298N双H桥直流电机驱动芯片,稳定性高,采用铝电解电容,使电路稳定工作。可以直接驱动两路直流电机,并提供了5 V输出接口(输入最低只要6 V),可以给5 V单片机电路系统供电(低纹波系数),支持3.3V MCU控制,可以由单片机模拟PWM信号控制两后轮的速度与方向。图1为驱动模块原理示意图。
机械结构设计上采用两个直流电机后驱,结合前万向轮的方式完成装置的运动,这样设计的优点在当两直流电机反向转动的时候,带动前万向轮即可实现较小位移范围内的转向,提高机器人在狭小空间内的运动能力。
2.3 传感器模块
传感器模块由一个超声波传感器与多个轻触开关组成,其中,超声波传感器安装在舵机上,并用固定支架将其固定于机器人前端,通过舵机的转动以及超声波传感器测距相结合,实时探测机器人前端180°范围内的工作环境,后方及两侧的轻触开关在超声波传感器无法精确处理机器人后方位置状态的时候,起到一个保证其正常安全工作的作用。同时由一组四位共阳数码管组成数据显示器,通过单片机处理,实时反馈显示超声波传感器的测距数据,便于装置的调试与检测。
2.4 电源模块
电源模块采用两块7.2 V镍氢可充电池以及一块太阳能电池板组成,其中太阳能电池板安装在机器人顶部通过充电电路与其中一块镍氢可充电池连接,这样,当清洁机器人在太阳能电池板的工作条件下工作时,太阳能转化为镍氢电池的电能储存起来,由另一块电池为清洁机器人供电,当环境不适合太阳能电池板工作时,用波动开关将电路切换到由备用镍氢电池供电的电路,保证机器人的正常工作供电。
2.5 清洁模块
采用滚筒式毛刷和海绵吸液装置复合工作方式,海绵吸液装置部分置于机器人底部,采用PVA高密度吸水海绵,液体处理能力更加出色,滚筒由一个直流电机通过齿轮组连接带动工作,和收集器一起由固定件安装在装置底部中间的主要工作位置,滚筒毛刷采用防静电尼龙材质毛刷,耐磨损,不附尘,这样的复合装置既能扫除干燥杂物,又能吸收处理液体污物,提高清洁效率与质量,在面对复杂工作条件时能发挥更好的作用。图2为系统机构图。
3 清洁机器人软件系统设计
在实际工作环境下,先按下机器人开关,舵机先执行归中程序将超声波传感器正对机器人前方工作区,清洁模块根据环境条件调控选择至太阳能电池或蓄电池供电方式,同时滚刷开始由电机带动工作,由超声波传感器对前方进行测距,将相关数据输入单片机处理,并将处理结果数据反馈之数码管显示,当清洁机器人与前方障碍物距离大于安全距离时,机器人前进并开始工作,海绵装置吸收处理地面液体污物,碎纸细屑则由滚筒毛刷卷入其后的收集器中,超声波传感器保持对前方的测距处理,当超声波传感器检测到前方障碍物小于安全距离时,机器人开始执行避障程序:用延时函数控制其短暂后退一小距离然后停止,超声波传感器随舵机由单片机进行PWM控制转动,对机器人前方180°角范围进行障碍测距,经程序检测分析,若机器人与两边障碍均大于安全距离,则向距离更远的一方保持原地转向(两直流电机相反向转动)后前进。若只有一方小于安全距离,则转向另一方后前进。若与两边障碍均小于安全距离,则沿原路后退一小段距离后再次进行如上方式测距,直至安全距离。当检测到前方距离小于安全距离的时候,进入到中断服务函数,停止前进并对前方180°范围进行测距处理,或当内部定时器时间到的时候,保持前进并对前方180°范围进行测距处理。主程序流程图如图3所示。
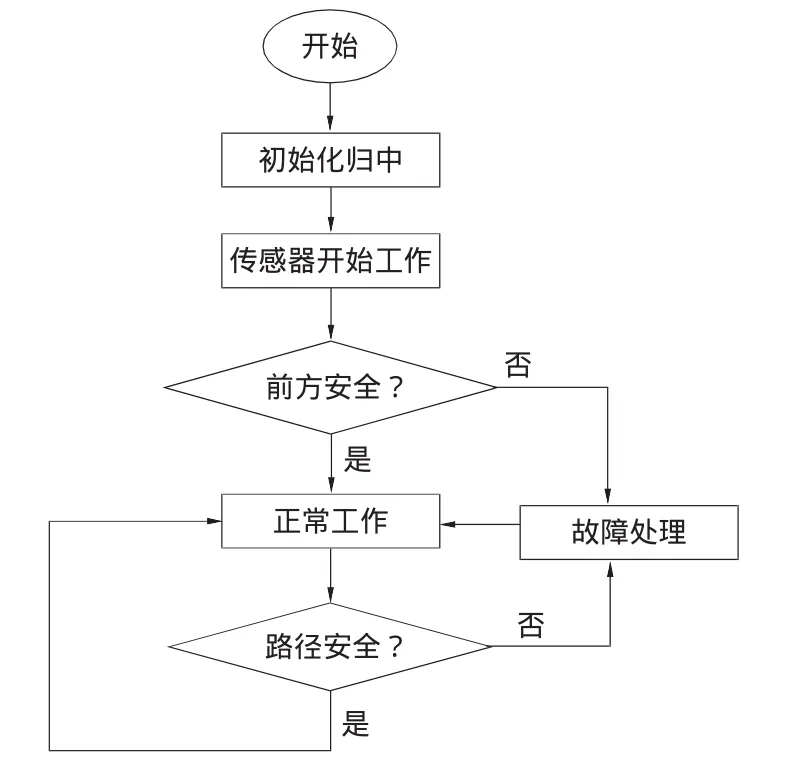
图3 主程序流程图
4 结语
提出了一种基于STC89c52为控制核心,以小车为运动载体,有效利用环保太阳能,采取多传感器组合避障的智能清洁机器人设计,其电源模块设计,既满足清洁机器人的工作条件,又符合现代环保科技的观念,是未来可能形成的一种发展趋势,可进一步通过添加电池电压检测模块、太阳能检测模块等等,进一步优化配置程序,使之做到自动根据环境因素调节选择供电方式。本机器人避障程序逻辑清楚实用,能够及时避开障碍物,提高了清洁机器人的工作效率与稳定性,但路径较为无规律,适用于简单理想环境,若工作于复杂环境之下,可考虑加入更高精度路径规划,如沿内螺旋式“回”字型路径、区域遍历算法等。
[1] 曹建树,曾林春,靳志杰.室内智能清洁机器人控制系统设计[J].机械与电子,2009(6):60-63.
[2] 曾岑,陈进,蒋玉杰.智能型室内清洁机器人的研究和发展探析[J].机械制造,2008,46(530):63-67.
[3] 梁喜凤.室内地面清洁机器人路径规划[J].中国计量学院学报,2006,17(1):64-68.
[4] 刘天钊.基于单片机智能机器人的设计[J].科技信息,2012(36):477-478.
