基于多时相DMC影像的建筑物变化检测技术研究
2015-05-12刘春玲
刘 春 玲
(黑龙江信息技术职业学院,黑龙江 哈尔滨 150025)
基于多时相DMC影像的建筑物变化检测技术研究
刘 春 玲
(黑龙江信息技术职业学院,黑龙江 哈尔滨 150025)
介绍利用同一区域相隔两年的DMC图像,研究通过变化检测得到的建筑物变化信息的方法。根据建筑物影像的显著特征,理论联系实际,先后采用基于线特征的建筑物变化检测和基于区域与边缘分析的建筑物变化检测两种方法,分别对这对多时相DMC影像进行检测研究。结果是,前后的检测结果中出现了矩形的绿地信息,而后者的检测结果更为准确。从而得到结论:基于区域与边缘分析的建筑物变化检测技术有一定应用价值。
DMC;变化检测;建筑物
变化检测就是通过比对分析多时相遥感影像,发现、确定并获取变化信息的过程[1]。这是近年来遥感领域的热点话题,在医学、军事、民用等领域都有着广泛的应用。建筑物是一般影像中比较重要的人工地物元素,在遥感影像[2]中提取建筑物信息近年来一直都是遥感领域的敏感话题。研究基于多时相遥感影像的建筑物变化检测技术无疑是明智之举。实践方面,变化检测得到的建筑物影像的特征点可以用作地形图更新的控制点[3],也可以满足GIS数据更新的需要;理论方面,可以为影像中其他地物的变化信息检测提取提供理论和方法指导[4]。
随着科学技术的发展和社会的变迁,我们的地球发生着日新月异的变化,地理信息数据库的实时更新也迫在眉睫。随着传感器技术的发展,我们所能获取的影像的分辨率越来越高[5],影像所涵盖的信息量也越来越大,如果能够充分利用这些信息将会达到事半功倍的效果。然而由于地理信息的多样性、复杂性,眼下并没有一种统一的技术能够利用变化的影像实时更新地理信息数据库中的所有数据,考虑到同类地物的影像具有相同的属性,因此研究起来可行性较高。
人工地物是众多发生变化的地理信息中最主要的信息,其中,建筑物信息占有很大的比例。基于建筑物影像的特征较为明显[6],其特征点辨识难度相对较低,因此本文选择建筑物信息的变化检测作为研究对象。一方面,建筑物影像中比较明显的特征点可以作为其他地物测绘的控制点;另一方面,成功针对建筑物进行变化检测无疑会对其他复杂地物的变化检测具有一定的理论指导作用。
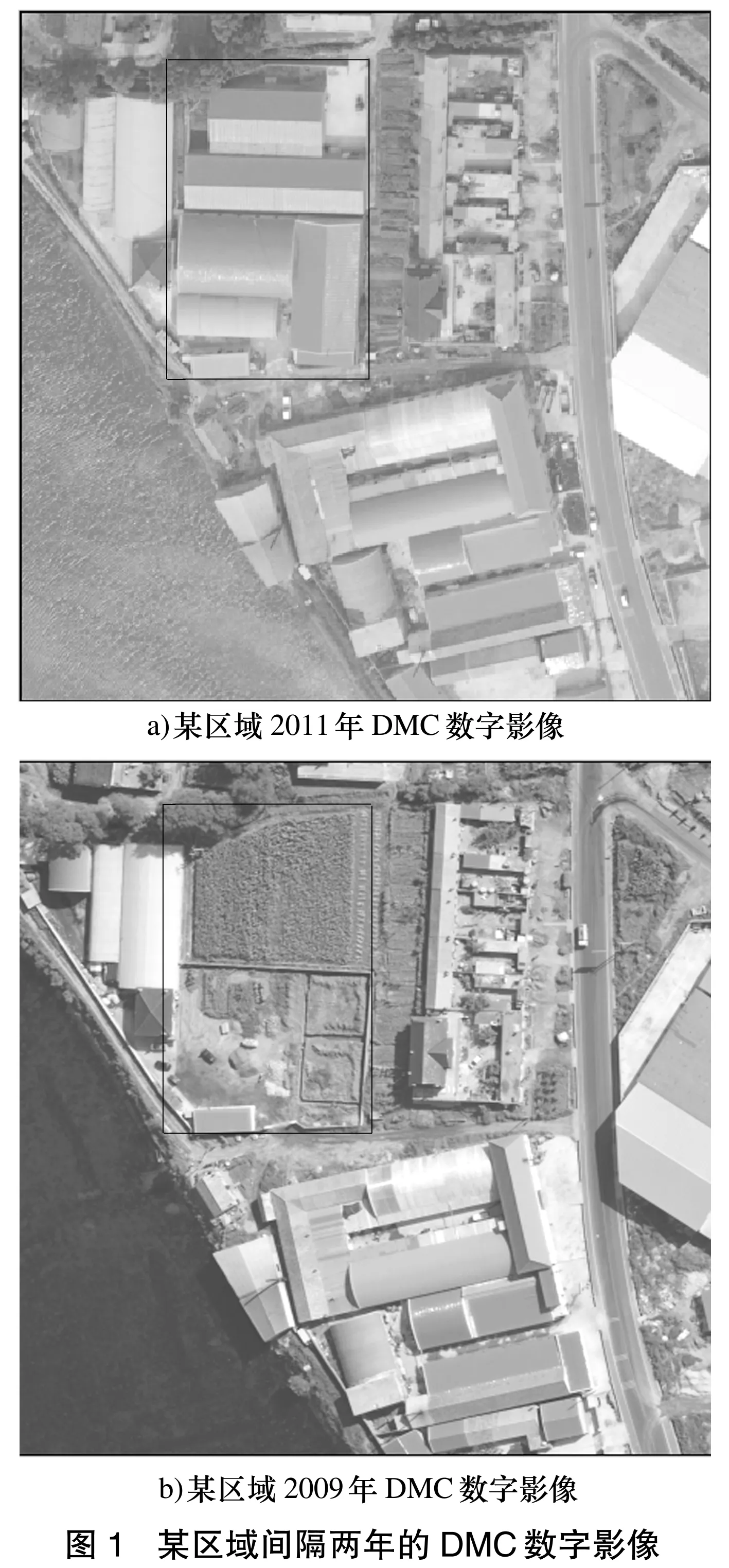
伴随着光电技术和计算机传输技术的发展,DMC(数字航摄仪系统)应运而生,解决了在传统的航摄底片转换成数字影像的过程中由于烦琐的环节而产生的各种影像质量问题。DMC数字影像信息量丰富,立体测图影像清晰,就连很细微的信息也能够清楚地体现。本文基于某区域2009年和2011年的DMC影像,采用分类后比较法进行建筑物的变化检测。如图1所示为某区域间隔两年的DMC数字影像,采用同一季节不同时相的图像数据,可以减少由季节变化引起的相同地物的光谱差异。从影像上来看,主要的变化就是由从农田到建筑物的变化(如图1中红色框所示的相应位置),正好适用于本课题。
1 研究区域影像预处理
本文所采用的算法全部适用于8位灰度图像,因此在变化检测过程中,进行算法检测之前需要将DMC数字影像转换成适于研究的8位灰度图像:将图像中的每个像素用公式(1)计算其灰度值,
intgray=r×0.3+g×0.59+b×0.11
(1)
式中r、g、b分别为该像素对应的R、G、B颜色分量,然后用求得的灰度值代替原来该像素的R、G、B分量就行了。
2 基于DMC影像的边缘检测
Prewitt边缘检测算子、Sobel边缘检测算子、Roberts边缘检测算子、Laplacian边缘检测算子、Canny边缘算子是几种比较常用的边缘检测算子。通过实验比较发现Canny边缘算子是相对最适合本课题研究的算法。
1986年,John Canny在IEEE上发表的文章具有划时代的意义,作者总结了前人的算法提出用于边缘检测的三条准则(Canny 准则),并基于该理论得到相应的算法。Canny准则[40]描述如下:①检测点最优化(不漏掉正确的边缘点,不检测错误的边缘点,输出的信噪比尽可能达到最大);②检测精度达到最优(检测得到的点离影像中实际对应的边缘点距离最近);③检测结果中的点与影像中的边缘点呈一一对应的关系。
3 邻接矩阵边缘跟踪法
利用Canny算子进行边缘检测得到的边缘信息中,包含图像中各种类型地物的边界,有建筑物、耕地、道路等,除了线段之外,还有很多曲线信息。根据我们对建筑物形状的假设,曲线不在我们的处理范围之内,因此,需要对边缘检测得到的边缘信息图进行“扫描”然后剔除没有意义的曲线信息。
现将根据图像的邻接矩阵跟踪、处理其边缘链得到线单元的过程概括为三个步骤:
步骤一:扫描跟踪边缘图像中的边缘链,并存储独立边缘链的信息;
步骤二:构建边缘链的邻接矩阵(包括链本身的邻接矩阵以及其端点的邻接矩阵),基于邻接矩阵对边缘链进行正确的合并或删除操作;
步骤三:用迭代分裂的方法处理得到的边缘链,最终获得线单元。
4 基于矩形结构元算法的建筑物屋顶提取
利用单元直线编组技术对迭代分割后的线单元进行合并,生成直线,基于得到的直线信息,结合建筑物影像的几何特征(多为矩形的组合)[7]提取影像中的建筑物。
矩形结构元算法基本能够自动检测出图像中的矩形房屋目标,但是存在重复搜索,并且算法相对繁琐,必须相互比较搜索到的矩形元结构,从而删除重复的矩形元。基于这一点,我们在此基础上结合半矩形结构元,加入建筑物主方向的概念,得出另一种改进后的半矩形结构元算法。
由矩形的任意三条边构成的非完整矩形结构就是半矩形结构,这三条边的长度可以不相等。根据经验我们知道,同一地区的建筑物走向方位基本一致,且对边平行,因此可以先对候选直线进行分类,得到的基本平行的直线为同一类,直线间夹角过大的为不同类直线。分类之后可以很轻松地得出影像中建筑物的主要走向,也叫建筑物的主方向。接下来剔除那些方向不同于建筑物主方向且小于minlenth的干扰直线,构建半矩形结构,具体的构建过程如下:
(1)对所有的候选直线按照直线的长度排序;
(2)将长度最长的直线作为第一条直线l0,同时做好标记,接着遍历其他直线,找出能与l0共同构建半矩形结构的另外两条直线l1和l2,做好标记,以免重复操作;
(3)在剩余直线中选择其中的一条作为l0,按照上一步骤重复操作,找出下一个半矩形结构元,做好标记以免重复;接着重复该步骤直到遍历所有候选直线。
基于半矩形结构元,我们根据矩形的几何特征可以轻松算出该矩形四个顶点的坐标,顺序连接该矩形的四个顶点,即可提取出建筑物。和传统的矩形结构元算法相比,改进后的矩形结构元算法通过半矩形结构元提取建筑物屋顶信息,其构造过程简化多了。
5 基于线特征的建筑物变化检测
基于上述对遥感影像中建筑物影像提取方法的研究,本节在建筑物的变化检测流程中采用上述方法获取建筑物屋顶信息,最后检测出变化的建筑物信息。建筑物信息提取步骤如下:对图像进行预处理后采用Canny算子进行边缘检测,其次对边缘图像用邻接矩阵边缘跟踪法和迭代分割获取线单元(EL),然后利用单元直线编组技术获取直线,最后根据半矩形结构元算法提取建筑物信息。基于对多时相影像提取的建筑物信息结果图进行对比分析,最终得到建筑物信息的变化结果。
分析变化检测结果发现,在2009年的屋顶信息提取结果中出现了矩形绿地的信息,其原因是在边缘检测过程中将影像中的矩形绿地的边缘信息也采集了进来。可见,基于线特征的建筑物变化检测方法仅仅基于图像的边缘信息,不能识别出矩形或类矩形形状的非建筑物信息,因此,这类方法用于建筑物信息的变化检测是有很大缺陷的。
6 基于区域与边缘分析的建筑物变化检测
基于线特征的建筑物变化检测方法主要是单纯地利用建筑物影像的形态特征,对于光谱、纹理等其他信息的应用比较缺乏,所以具有一定的局限性。单纯地利用一类特征进行变化检测的方法很难再有大的突破,特别是当图像中干扰较多时,例如本课题所研究的影像中具有大量的矩形要素,但并不全是建筑物,因此单纯地按照形状特征来提取将不能区分同样呈矩形的耕地要素和建筑物要素。
近年来,随着影像资料的日益丰富,越来越多的学者开始关注如何充分挖掘并利用高分辨率遥感影像所包含的丰富的信息[8],其中被研究最多的技术就是对高分辨率遥感影像的分类技术,这类技术就是将图像像元按类别进行划分[9]。Baatz和Schape结合多尺度分割方法和决策树分类方法,结合辅助信息,基于影像的光谱特征和纹理特征对目标地物进行识别,取得了很好的结果。原则上高分辨率遥感影像中的典型面状人工地物(如建筑物、耕地等)尤其适用。
面向对象的遥感影像分类技术主要包括图像分割(一般采用多尺度分割)和模糊分类两个步骤。实践证明,图像分割结果比多特征模糊分类结果对分类结果的影响更大[10]。因此在分类技术中对遥感图像的多尺度分割的地位绝对重要,如果能先对遥感图像进行准确有效的多尺度分割,其后再结合一些方法,将大部分非建筑物信息删除,然后再进一步考虑采用基于线特征的方法提取建筑物,最终实现建筑物的变化信息检测。由于图像分割后去除了大部分干扰信息,因此就能同时满足建筑物提取的准确性和快速性要求,其适用性和实用性都能大大提高。
现有的多尺度分割算法有很多,Mean Shift算法是其中的一种,它充分利用空间特征以及光谱特征,通过参数对分割精度实施控制(该参数具有一定的物理意义)。Mean Shift算法与目前eCognition软件提出的算法相比,分割结果同样和视觉分割一致,且速度更快,是一种稳健、快速的多尺度分割方法[11]。自1975年Fukunaga等人提出Mean Shift(偏移向量均值)这个概念以来,许多学者都对此做了深入的研究并加以推广,使得其适用范围在一定程度上得到了扩展。
为了有效地去除矩形以及类矩形形状的非建筑物信息,这里采用结合Otsu阈值分割的Mean shift算法用于图像分割:首先采用Mean Shift算法实现图像的多尺度分割,再用Otsu算法实现图像的阈值分割。Otsu算法基于图像灰度进行阈值分割,处理后可以将大部分非建筑物图像清除,同时使图像二值化。从实验结果来看,单独使用Otsu算法进行的阈值分割结果中保留了很多干扰信息,因此想要据此直接提取建筑物有很大的困难;而首先对图像进行多尺度分割——将收敛至同一点的起始点归至同一类的分割方法,然后再对图像进行阈值分割——消除大多数非建筑物的干扰信息。
7 结语
比较两种方法的实验结果,我们发现,后一种技术在建筑物变化检测的过程中,效果明显优于前者。在建筑物信息的提取过程中,采用多尺度分割以及阈值分割的方法,有效地剔除了非建筑物信息,最终得到的变化检测结果比较准确。因此,基于区域与边缘分析的建筑物变化检测技术有一定的应用价值。
[1]钟家强.基于多时相遥感图像的变化检测[D].长沙:国防科学技术大学,2005.
[2]李德仁.利用遥感影像进行变化检测[J].武汉大学学报:信息科学版,2003,(Z1):7—12.
[3]王汉英,张占睦,张一鸣,张昭云.遥感影像变化检测在地形图快速修测中的应用[J].测绘工程,2009,18(2):51—54.
[4]陈光.遥感图像中建筑物识别与变化检测[D].南京:南京理工大学,2005.
[5]祝锦霞.高分辨率遥感影像变化检测的关键技术研究[D].杭州:浙江大学,2011.
[6]任大卫.面向建筑用地的遥感影像变化检测方法技术研究[D].北京:中国科学院,2004.
[7]张煜,张祖勋.几何约束与影像分割相结合的快速半自动房屋提取[J].武汉测绘科技大学学报,2000,25(3):238—242.
[8]陈忠.高分辨率遥感图像分类技术研究[D].北京:中国科学院研究生院,2006.
[9]乐宋进,武和雷,胡泳芬.图像分割方法的研究现状与展望[J].南昌水专学报,2004,23(2):15—20.
[10]罗三定,张中良.自动分布阈值图像多目标分割算法[J].计算技术与自动化,2008,27(2):77—80.
[11]莫登奎,林辉,LI Ji-ping,李际平,孙华,熊育久.基于均值漂移的高分辨率影像多尺度分割[J].广西师范大学学报:自然科学版,2006,24(4):247—250.
责任编辑:柴造坡
10.3969/j.issn.1674-6341.2015.06.010
2015-10-26
刘春玲(1985—),女,湖北宜昌人,工程硕士,讲师。研究方向:图像处理、FPGA技术。
TP39
A
1674-6341(2015)06-0023-03
