汽车转向开关自回位过程的动力学仿真和实测
2015-05-11韩轩童晓峰
韩轩 童晓峰
摘要:用CATIA建立一款汽车转向开关的三维模型.针对转向开关自动回位过程中转向手柄的振颤及反向接通问题,用MSC SimDesigner建立转向开关自动回位过程的多体动力学分析模型,研究不同驱动转速条件下的开关自动回位动态特性,得到多种工况下转向手柄转动角度和转动角速度随时间的变化曲线.对实际开关自回位过程进行测试,计算结果与实测结果基本吻合,表明采用多体动力学仿真方法评估转向开关自动回位动态特性是有效可行的.根据仿真结果找到该转向开关无驱动自回位过程且反向功能无接通时需要的最小临界接通角度,左右两侧分别为4.06°和5.08°.
关键词:汽车; 转向开关; 自动回位; 多体动力学; 转动角度; 转动角速度
中图分类号: O313; U461.1; TP391.9
文献标志码:B
Abstract:A 3D model is built for an automobile turn signal switch using CATIA. As to the vibration and reverse switch-on issues of turn signal hand lever during the automatic return process of turn signal switch, a multi-body dynamics analysis model is built for the automatic return process of an turn signal switch using MSC SimDesigner, the dynamic characteristics of automatic return of the switch are studied in different driving rotation velocities, and the variation curves of rotation angle and angular velocity of turn signal hand lever against time are obtained in multi-conditions. The automatic return process is tested for a real product, and the calculation results are well consistent with the test results, which shows that it is feasible to estimate the dynamic characteristics of automatic turn process for turn signal switch using multi-body dynamics simulation method. According to the simulation results, the minimum critical switch-on angles in non-driving automatic return process without reverse switch-on are obtained, which are 4.06° in the left and 5.08° in the right.
Key words:automobile; turn signal switch; automatic return; multi-body dynamics; rotation angle; rotation angular velocity
0引言
随着汽车的普及,汽车市场的竞争越来越激烈,汽车厂商和消费者对汽车电器开关操作舒适性的要求越来越高,而转向组合开关是汽车电器开关中结构相对复杂、使用频率较高的产品,是直接面向驾驶员的窗口,操作是否舒适在每次操作时直接反馈到驾驶员的触感神经.[1-2]目前设计的转向组合开关一般带有自动回位系统.当转向动作完成、方向盘归正时,手柄会自动回到零位,回位过程中手柄会振颤,影响驾驶者的主观感受;如果振颤过大,反向变道信号灯有可能被接通,对其他车辆造成误导,容易诱发事故.因此,有必要对转向组合开关自动回位过程进行研究.
目前,对汽车转向开关的研究多集中于主动操作时的手感特性评价[2-4]和测试系统开发[5-6],而对转向开关的自动回位性能研究较少.多体动力学方法在汽车及其零部件的动态性能研究领域已经得到广泛应用.[7-11]本文以某汽车转向开关为研究对象,基于多体动力学方法对转向开关的自回位过程进行多工况仿真,并与实测结果进行对比.
1自动回位系统工作原理
1.1转向组合开关建模
用CATIA建立转向开关的三维模型,主要由转向手柄、上下壳体、自动回位系统和操作手感系统等组成,见图1.
操作手感系统主要由转向手柄、弹簧、顶销和手感曲面组成.当转动转向手柄时,顶销在手感曲面上滑动,随着曲面的高低起伏和弹簧压缩量的变化而产生一定的操作手感.为使开关在向左或右转向时能够停留,手感曲面的左右两侧各设计一个顶点.当开关停留在左或右转向功能时,顶销越过手感曲面的顶点停留在转向位置.当开关从转向位置向零位运动时,顶销在手感曲面上反向滑动;当顶销反向越过手感曲面的顶点后,手感系统的回复力驱动手柄回到零位.
1.2自动回位系统
转向组合开关的自动回位系统结构见图2,主要由回位环、回位拨片、回位滑块和回位曲面等组成.回位环上布置有回位卡槽.
当转向组合开关转向手柄向左或右转时,回位拨片被回位滑块推出,见图3.当回位拨片被推出后,与回位环上的回位卡槽之间产生一定的搭接量;当回位环向反方向转动时,回位卡槽推动回位拨片运动.此时,转向手柄从转向位置向零位运动,当顶销越过手感曲面的顶点时,转向手柄自动回位,从而实现转向开关自动回位功能.在手柄向零位转动的过程中,回位拨片被回位曲面拉回,回位卡槽与回位拨片之间的接触分开.
2动力学分析模型的建立
对转向组合开关各个零件赋予相应的密度属性,动力学仿真软件能够根据零件构型计算零件的质量大小和重心位置.[12]在动力学分析过程中,认为零件为刚性体,不考虑零件的变形.利用MSC SimDesigner[13]的Motion Workbench模块,分别建立转向组合开关左右转向时的自回位过程动力学分析模型.
2.1运动约束建模
转向组合开关由多个零件组成,各个零件之间通过各种约束限制相对运动,并以此将不同构件连接成一个运动系统.根据转向组合开关自动回位过程的运动规律,建立以下约束:
1)在回位过程中,上壳体和手感曲面固定不动,故定义上壳体和手感曲面为地.
2)在手柄与上壳体之间建立旋转副,以手柄转轴为旋转中心.
3)在顶销与手柄之间建立滑移副,滑移方向为顶销的中心,当手柄旋转时顶销随着手柄一起旋转.
4)在复位曲面与手柄之间建立固定副,复位曲面固定在手柄上.
5)为实现回位拨片的运动,在模型中增加一个附件.在附件与回位拨片之间建立旋转副,旋转中心为回位拨片的旋转轴;在附件与上壳体之间建立滑移副,滑移方向为上壳体导槽方向;当附件滑动时,回位拨片随附件一起滑动,并且回位部件同时沿旋转轴旋转,从而实现回位拨片的实际运动方式.
6)在回位滑块与上壳体之间建立滑移副,滑移方向为上壳体导槽方向.
7)在回位环与地之间建立旋转副,旋转方向为回位环的中心轴,与方向盘同轴.
2.2力元建模
在动力学分析时,使用线性弹簧阻尼器代替真实弹簧.线性弹簧阻尼器表征作用在一定距离的2个部件和沿2个部件之间的力,施加在2个部件上的力分别为作用力和反作用力,二者大小相等,方向相反.当定义纯弹簧时,定义线性弹簧阻尼器的黏滞阻尼系数为0.[14]在回位滑块与上壳体导槽之间建立线性弹簧阻尼器,弹簧原长定义为22.0 mm,弹簧刚度定义为0.08 N/mm,黏滞阻尼系数定义为0,在开关左转或右转时,该弹簧起推出回位拨片的作用.在圆柱顶销和手感曲面之间建立线性弹簧阻尼器,弹簧原长定义为34.5 mm,弹簧刚度定义为4.00 N/mm,黏滞阻尼系数定义为0,当开关左转或右转时,该弹簧提供手感操作力,在开关自动回位过程中该弹簧提供回位驱动力.
通过添加碰撞接触力的方式模拟2个运动物体间的接触关系.依次在圆柱顶销与手感曲面之间、回位拨片与回位卡槽之间、回位拨片与回位滑块之间及回位拨片与回位曲面之间建立接触关系,接触过程的静摩擦因数设为0.10,动摩擦因数设为0.08.
2.3添加回位环驱动
当转向开关停在左转或右转位置时,反向转动回位环可以使转向开关自动回到零位.在动力学仿真时,使用软件内部的IF或STEP函数均可以对运动副施加速度驱动.本文采用IF函数为回位环旋转副施加角速度驱动,该IF函数为
该函数定义的回位环转动时间为0.100 s,当时间超过0.100 s时,回位环停止运动.定义的回位环转动速度为4π rad/s,即720.0 °/s,当需要改变驱动速度时,修改此参数即可.本文设置4个回位环的驱动速度,分别为720.0,360.0,180.0和0.1 °/s.认为0.1 °/s是临界状态,回位环施加在手柄的驱动力为0,此时顶销越过手感曲面顶点时的速度几乎为0,转向开关为无驱动自回位过程,回位能量仅由操作手感回复力提供.
3动力学分析结果
分别对左转向和右转向时的自动回位过程进行仿真计算,每个方向各计算4种工况,得到转向手柄旋转角度和角速度随时间的变化曲线,以第一次通过零位时的时间为起点进行对比.
3.1左转向时自动回位过程分析
当左转向时,在回位环添加不同驱动转速,手柄转动角度随运动时间的变化曲线见图4.由此可知:当回位环驱动转速为720.0 °/s时,手柄的最大反向旋转角度约为8.36°,振荡时间约为0.088 s;当回位环驱动转速为0.1 °/s时,手柄的最大反向旋转角度约为5.08°,振荡时间约为0.064 s;当回位环驱动转速为180.0和360.0 °/s时,手柄的最大法向旋转角度分别约为5.31°和6.13°,振荡时间分别约为0.066和0.070 s.
当左转向时,在回位环添加不同驱动转速,手柄转动角速度随运动时间的变化曲线见图5.由此可知:当回位环驱动转速为720.0 °/s时,手柄通过零位时的最大角速度约为660 °/s;当回位环驱动转速为0.1 °/s时,手柄通过零位时的最大角速度约为503 °/s;当回位环驱动转速为180.0和360.0 °/s时,手柄通过零位时的最大角速度分别约为512和534 °/s.
3.2右转向时自动回位过程分析
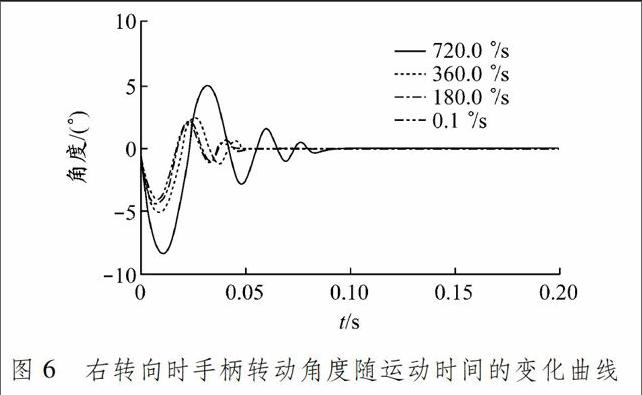
当右转向时,在回位环添加不同驱动转速,手柄转动角度随运动时间的变化曲线见图6.由此可见:当回位环驱动转速为720.0 °/s时,手柄的最大反向旋转角度约为8.24°,振荡时间约为0.086 s;当回位环驱动转速为0.1 °/s时,手柄的最大反向旋转角度约为4.06°,振荡时间约为0.049 s;当回位环驱动转速为180.0和360.0 °/s时,手柄的最大法向旋转角度分别约为4.45°和5.21°,振荡时间分别约为0.052和0.056 s.
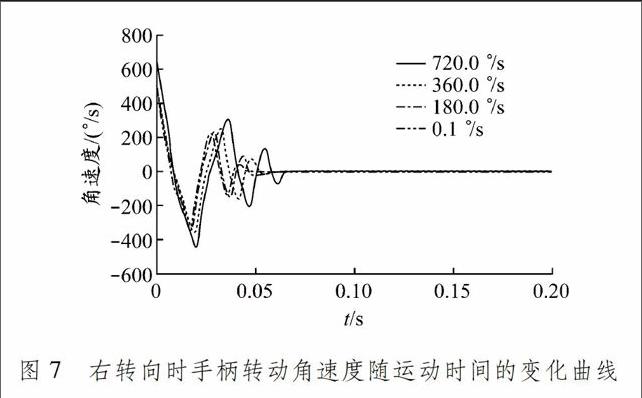
当右转向时,在回位环添加不同驱动转速,手柄转动角速度随时间的变化曲线见图7.由此可知:当回位环驱动转速为720.0 °/s时,手柄通过零位时的最大角速度约为644 °/s;当回位环驱动转速为0.1 °/s时,手柄通过零位时的最大角速度约为473 °/s;当回位环驱动转速为180.0和360.0 °/s时,手柄通过零位时的最大角速度分别约为479和526 °/s.
4实测与仿真对比
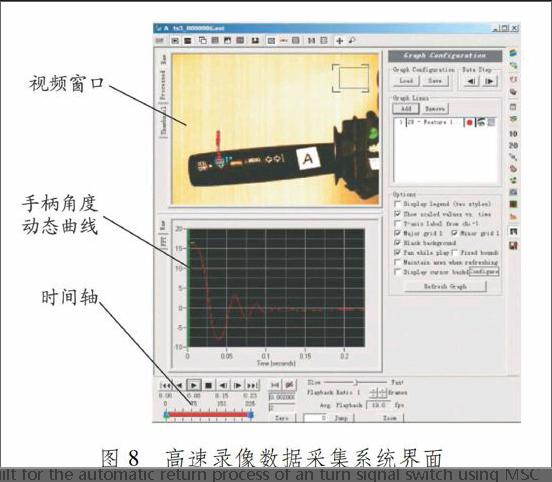
采用高速录像数据采集系统对手柄的自动回位特性进行测试,数据采集界面见图8.
参考仿真中最大驱动转速的工况进行测试,在回位环上施加720.0 °/s的驱动转速.当左转向自动回位时,自动回位过程仿真与实测数据对比见图9.由此可知:当左转向自动回位时,手柄最大反向旋转角度的实测结果约为8.11°,仿真结果比实测结果约大0.25°.
当右转向自动回位时,自动回位过程仿真与实测数据对比见图10.由此可知:手柄最大反向旋转角度的实测结果约为7.87°,仿真结果比实测结果约大0.37°.左右转向自回位动态过程的性能优劣主要由回位过程初期手柄的运动特性决定,由对比曲线可知:在左右转向自动回位的初期,仿真与实测的手柄波动吻合度较高,误差在10%以内.
5结论
通过仿真结果与实测结果的对比验证借助多体动力学方法仿真转向开关自动回位动态特性的有效性,表明通过仿真预测转向组合开关的自动回位特性可行.仿真结果表明回位环以任何速度驱动开关自动回位时,手柄均会越过零位产生振荡.回位环驱动转速越大,手柄的反向旋转角度越大,通过零位时的角速度越大,振荡时间越长.为满足开关在回位环驱动转速为0且完全自由回位过程中反向功能无接通的要求,根据仿真结果可以确定,左向变道信号最小临界接通角度为4.06°,右向变道信号最小临界接通角度为5.08°.
当转向开关自动回位过程回位环驱动速度的要求发生变化时,可以基于多体动力学分析方法对回位环施加要求的驱动转速,从而对转向开关自回位过程中反向旋转角度进行预估,进而调整转向开关的最小临界接通角度,保证在要求的回位驱动转速条件下,转向开关自回位过程中反向功能不会接通.
参考文献:
[1]钱江, 章桐. 汽车开关操作感知分析与优化[J]. 上海汽车, 2014(3): 53-55.
QIAN Jiang, ZHANG Tong. Analysis and optimization for operating feeling of vehicle switches[J]. Shanghai Auto, 2014(3): 53-55.
[2]胡延平, 陈福恩, 贾艳辉. 汽车组合开关操作性能评价参数的规律性探索[J]. 汽车技术, 2009(9): 39-43.
HU Yanping, CHEN Fuen, JIA Yanhui. Study on regularity of evaluation parameters on operating performance of automobile multi-function switches[J]. Automobile Technol, 2009(9): 39-43.
[3]刘岩睿, 夏群生, 何乐. 汽车转向组合开关力特性研究[J]. 汽车工程, 2004, 26(3): 336-340.
LIU Yanrui, XIA Qunsheng, HE Le. Evaluation of force-related characteristics of multi-function switch of vehicles[J]. Automotive Eng, 2004, 26(3): 336-340.
[4]刘克军, 范学, 李高林. 开关力特性曲线研究[J]. 汽车电器, 2012(7): 9-11.
LIU Kejun, FAN Xue, LI Gaolin. Study on performance curve of switch power [J]. Auto Electric Parts, 2012(7): 9-11.
[5]高印寒, 樊宽刚, 杨开宇, 等. 基于神经网络的汽车压力开关测试系统[J]. 吉林大学学报: 工学版, 2011, 41(3): 706-710.
GAO Yinhan, FAN Kuangang, YANG Kaiyu, et al. Automotive pressure switch test system based on neural network[J]. J Jilin Univ: Eng & Technol, 2011, 41(3): 706-710.
[6]李伟强. 汽车用开关性能试验台系统的研究[D]. 长春: 吉林大学, 2004.
[7]沈杨, 卫冬生, 徐筱欣. 基于Adams的新型离合器动态特性仿真[J]. 计算机辅助工程, 2006, 15(S1): 140-143.
SHEN Yang, WEI Dongsheng, XU Xiaoxin. Dynamic characteristics simulation of new type of clutch based on Adams[J]. Comput Aided Eng, 2006, 15(S1): 140-143.
[8]舒进, 赵德明. 基于Adams的汽车柔性扭力梁后悬架特性分析及操稳性仿真[J]. 计算机辅助工程, 2006, 15(S1): 199-201.
SHU Jin, ZHAO Deming. Analyses on rear suspension characteristics and handling performance with flexible twist axle using Adams[J]. Comput Aided Eng, 2006, 15(S1): 199-201.
[9]蒋东升, 杜国省, 李永生, 等. 基于Adams/View的汽车滑移门动力学仿真分析[J]. 计算机辅助工程, 2013, 22(S1): 8-10, 20.
JIANG Dongsheng, DU Guoxing, LI Yongsheng, et al. Dynamic simulation analysis on automotive sliding door based on Adams/View[J]. Comput Aided Eng, 2013, 22(S1): 8-10, 20.
[10]叶明松, 尹冰, 舒忠, 等. 基于Adams的转向机构优化分析[J]. 计算机辅助工程, 2013, 22(S1): 30-33.
YE Mingsong, YIN Bin, SHU Zhong, et al. Optimization of steering mechanism based on Adams[J]. Comput Aided Eng, 2013, 22(S1): 30-33.
[11]吕召全, 华从波, 周福庚. Adams在双前桥转向机构设计中的应用[J]. 计算机辅助工程, 2006, 15(S1): 153-155.
LYU Zhaoquan, HUA Congbo, ZHOU Fugeng. Application of Adams in design of steering mechanism of double-front axle[J]. Comput Aided Eng, 2006, 15(S1): 153-155.
[12]李伟, 赵剑. 基于MSC SimDesigner的自卸汽车举升机构仿真分析[J]. 山东交通学院学报, 2012, 20(2): 1-5.
LI Wei, ZHAO Jian. Simulation analysis for lifting mechanism of dump truck based on MSC SimDesigner[J]. J Shandong Jiaotong Univ, 2012, 20(2): 1-5.
[13]张萌, 王鹏林. MSC SimDesigner在产品设计中的作用[J]. 计算机辅助工程, 2006, 15(S1): 447-449.
ZHANG Meng, WANG Penglin. Application of MSC SimDesigner in product design[J]. Comput Aided Eng, 2006, 15(S1): 447-449.
[14]陈志伟, 董月亮. Adams多体动力学仿真基础与实例解析[M]. 北京: 中国水利水电出版社, 2012.
(编辑于杰)
