基于压电陶瓷直驱的前向像移补偿系统
2015-05-10魏君成杨永明
魏君成,杨永明
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
航空相机在航拍成像过程中,由于载机飞行、振动及相机摆扫成像等因素,使得曝光过程中地面景物与成像介质间产生相对运动,导致图像模糊、像质下降,即产生了像移[1]。像移按产生原因可大致分为4类:载机前向飞行造成的前向像移;载机姿态变化带来的随机像移;载机震动及气流波动引起的震动像移;相机镜头摆扫产生的摆扫像移。本文主要研究航空面阵测绘相机前向像移补偿方法。
面阵测绘相机在航摄成像时载机的前向飞行将产生前向像移速度,在景物照度高的条件下可以采用减少曝光时间的方法减少前向像移影响;在景物照度低的条件下为获取高质量航测图像需较长曝光时间,此时必须采取前向像移补偿措施。时间延迟积分(TDI)[2]技术适用于以单色面阵CCD为成像介质的测绘相机的前向像移补偿。目前面阵测绘相机多采用单片CCD或CMOS面阵探测器,通过Bayer滤波方式获取彩色图像。这类彩色测绘相机无法采用TDI技术,只能通过移动焦平面组件方式补偿前向像移。文献[3]和文献[4]采用等径共轭凸轮机构驱动焦平面组件补偿前向像移,该方法补偿精度较低,难以满足大比例尺测绘制图要求。压电陶瓷以位移分辨率高、驱动力强、响应速度快等特点得到广泛应用[5-6]。本文设计了一种采用压电陶瓷直接驱动焦平面组件的快速、高精度前向像移补偿系统。首先给出了像移补偿机构及工作方式,然后设计了像移补偿系统工作时序,最后通过实物实验对所设计的前向像移补偿系统进行性能验证。
2 航测成像前向像移
面阵测绘相机在航摄成像过程中,垂直地面安装,面阵CCD平行于地面。来自地面景物的光线经大气和光学镜头成像在面阵CCD上,实现对地面上的一个区域成像[7](图1)。随着飞机前向飞行,相机对地面上另一区域成像,通过设置拍照周期,可以控制相邻两次成像的重叠率。

图1 航测成像过程Fig.1 Imaging process of aerial photogrammetry
在相机成像过程中,像移将引起图像质量的下降。设地面景物点A对应于像面上的像点为A′,成像过程中像点A′的像移线速度VF可用式(1)计算。

式中:V表示载机飞行速度,H表示地面景物与载机的相对高度,f表示相机镜头焦距,θ表示直线AA′与镜头主光轴间的夹角。由式(1)可知,像面上任意一点的像移线速度VF均相同,推动像面以VF移动可实现对测绘相机航摄前向像移的完全补偿。
3 前向像移补偿策略
3.1 像移补偿机构
像移补偿机构采用压电陶瓷作为执行机构(如图2所示)。焦平面组件置于精密导轨上,精密导轨沿航向排列,焦平面组件可以沿航向进行直线运动。压电陶瓷通过柔性连接头与焦平面组件固连,柔性连接头可以消除侧向力对压电陶瓷的影响。压电陶瓷伸展方向与焦平面组件运动方向一致,当压电陶瓷驱动电压变化时,将产生推拉直线运动,驱动焦平面组件补偿前向像移。

图2 像移补偿机构Fig.2 Image motion compensation mechanism
3.2 位置控制
压电陶瓷具有迟滞非线性这一特性,同样的输入电压因为加压历史的不同对应不同的输出位移,同样的输出位移对应不同的输入输出曲线。压电陶瓷的这一特性影响了开环位置控制精度,难以满足像移补偿精度的要求。因此采用闭环控制以提高位置控制精度。位置控制回路框图如图所示,位置校正算法采用经典的PID算法[8],控制系统中引入了陷波器以消除系统低频谐振对系统闭环带宽的影响,提高系统的影响速度及位置控制精度。采用应变(SGS)传感器作为位置反馈原件,应变传感器位置分辨率优于2nm。

图3 位置控制框图Fig.3 Schema of position control
3.3 像移速度补偿
压电陶瓷驱动器工作于位置闭环方式,为实现焦平面组件以特定速度移动,采用斜坡递增方式设置压电陶瓷驱动器目标位置,如图4所示。设相机在拍照过程中前向像移速度为vμm/ms,相机像元尺寸为pμm,为获取清晰的图像,曝光过程中像移量不应超过像元尺寸的1/3,因此位置给定更新时间间隔Δt需小于p/(3v)ms。

图4 前向像移补偿给定位置设置Fig.4 Given position setting of FMC
3.4 像移补偿时序控制
航测成像过程中前向像移补偿系统需对像移补偿时序进行控制,保证相机拍照过程中焦平面组件处于像移速度补偿状态,拍照完成后焦平面组件需返回至拍照初始位置。像移补偿系统时序控制如图5所示。像移补偿系统收到拍照指令后开始检测摄影脉冲信号,摄影脉冲信号为高电平时,像移补偿系统处于位置模式,驱动焦平面组件到达拍照初始位置;摄影脉冲信号为低电平时像移补偿系统工作于速度模式,驱动焦平面组件补偿前向像移补偿速度。摄影脉冲信号由高电平变为低电平后,焦平面组件由初始位置启动,t1时段处于稳速过程,焦平面组件到达主点位置时曝光同步信号置为低电平,CCD收到曝光同步信号下降沿后执行清电荷操作并开始曝光;t2时段像移补偿系统驱动焦平面组件补偿前向像移;t3时段像移补偿系统由速度方式转为位置方式,驱动焦平面组件返回到拍照初始位置。如此循环,直至拍照结束。

图5 像移补偿系统工作时序Fig.5 Schedule of FMC system
4 实验分析
为进一步分析前向像移补偿策略的性能,进行了实物实验。实验采用德国PI公司生产的P-843.60型压电陶瓷驱动器推动焦平面组件进行前向像移补偿。P-843.60型压电陶瓷驱动器性能参数如表1所示。功率放大器选用德国PI公司生产的E-505型压电陶瓷功率放大器。采用高速DSP芯片控制压电陶瓷像移补偿过程,位置给定更新时间间隔Δt为1ms。像移补偿实验装置如图6所示,压电陶瓷驱动器通过柔性连接头直接驱动焦平面组件移动,焦平面组件重量约为1 kg。通过整定PID及陷波器参数,像移补偿机构位置环阶跃响应时间小于10ms,闭环带宽优于150Hz,具有良好的快速性。像称补偿实验场景如图7所示。

表1 P-843.60型压电陶瓷驱动器性能参数Tab.1 Performance perimeters of P-843.60piezoceramic
由式(1)可知,速高比及焦距决定前向像移补偿速度,航摄成像过程中曝光时间通常较短,可认为曝光过程中速高比不变,镜头焦距为确定量,因此曝光过程中前向像移补偿速度不变。实验过程中选择2.5mm/s及3.5mm/s具有代表性的前向像移补偿速度,像移补偿时间为20ms。

图6 焦平面组件实验装置Fig.6 Experimental setting of focal plane module

图7 前向像移补偿实验场景Fig.7 Experiment scene of FMC
4.1 2.5mm/s像移补偿速度

图8 2.5mm/s像移速率焦平面组件位置随时间变化情况Fig.8 Position of focal plane module vs.time at 2.5 mm/s image motion velocity

图9 2.5mm/s像移速率焦平面组件位置与像移量对比Fig.9 Position of focal plane module vs.image motion displacement at 2.5mm/s image motion velocity

图10 2.5mm/s像移速度像移补偿残差随时间变化情况Fig.10 FMC residual error vs.time at 2.5mm/s image motion velocity
压电陶瓷前向像移补偿系统补偿2.5mm/s像移补偿速率时,焦平面组件位置在压电陶瓷驱动下的变化情况如图8所示。焦平面组件首先以2.5mm/s做均速运动以补偿前向像移,然后再返回至拍照起始位置为下次像移补偿做准备。图9表明了在2.5mm/s像移补偿速率作用下像移量与焦平面组件位置随时间变化情况,可见焦平面组件的位移量与前向像移量一致,前向像移得到良好补偿。图10给出了在2.5mm/s像移补偿速率作用下前向像移补偿残差随时间变化情况,最大像移补偿残差为0.38μm。
4.2 3.5mm/s像移补偿速度
图11给出了在3.5mm/s像移补偿速率时,焦平面组件位置随时间变化情况,焦平面组件完成像移补偿后返回到拍照起始位置。图12表明了在3.5mm/s像移补偿速率作用下像移量与焦平面组件位移量随时间变化情况,前向像移得到良好补偿。图13给出了在3.5mm/s像移补偿速率作用下前向像移补偿残差随时间变化情况,最大像移补偿残差为0.48μm。

图11 3.5mm/s像移速率焦平面组件位置随时间变化情况Fig.11 Position of focal plane module vs.time at 3.5mm/s image motion velocity
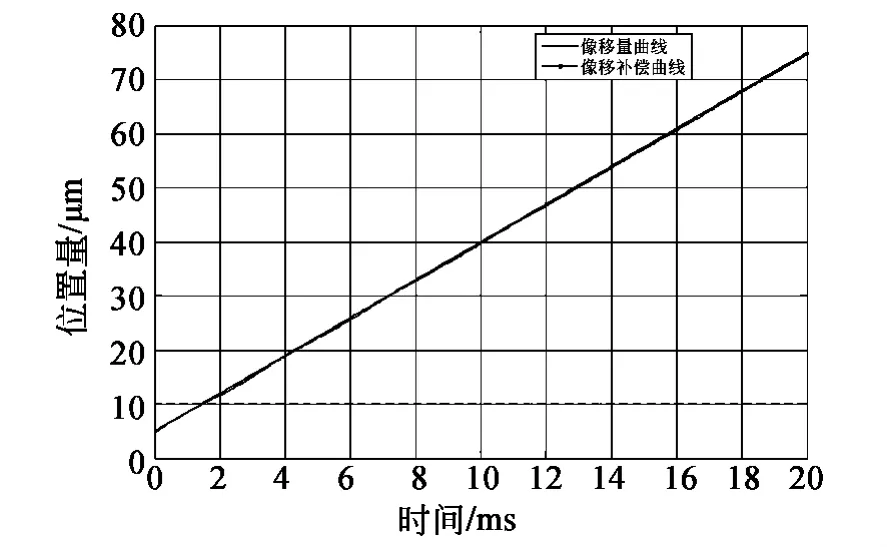
图12 3.5mm/s像移速率焦平面组件位置与像移量对比Fig.12 Position of focal plane module vs.image motion displacement at 3.5mm/s image motion velocity

图13 3.5mm/s像移速度像移补偿残差随时间变化情况Fig.13 FMC residual error vs.time at 3.5mm/s image motion velocity
5 结 论
针对航空测绘相机航测成像过程中的前向像移补偿问题,设计了一种以压电陶瓷驱动器为执行机构的前向像移补偿策略。实验结果表明,前向像移补偿策略能够控制焦平面组件以预设控制时序完成像移补偿。前向像移速度为2.5mm/s时最大像移补偿残差为0.38μm,前向像移速度为3.5mm/s时最大像移补偿残差为0.48μm。目前航测相机像元尺寸小于5μm,前向像移补偿策略满足最大像移补偿残小于1/3像元尺寸要求。
通过实验数据可知焦平面组件回位时间小于15ms,像移补偿稳速时间小于5ms。相机最长曝光时间为20ms时,前向像移补偿频率可达25Hz,满足航测成像高频率前向像移补偿要求。
[1] 刘明,匡海鹏.像移补偿技术综述[J].光电与控制,2004,11(4):46-49.Liu M,Kuang H P.Survey on the image motion compensation technology [J].Electronics Optics & Control,2004,11(4):46-49.(in Chinese)
[2] 王德江,匡海鹏,蔡希昌,等.TDI-CCD全景航空相机前向像移补偿的数字实现方法[J].光学精密工程,2008,16(12):2465-2472.Wang D J,Kuang H P,Cai X C,et al.Digital implementation of forward motion compensation in TDI-CCD panoramic aerial camera[J].Optics and Precision Engineering,2008,16(12):2465-2472.(in Chinese)
[3] 李延伟,远国勤.面阵彩色航空遥感相机前向像移补偿机构精度分析[J].光学精密工程,2012,20(11):2439-2443.Li Y W,Yuan G Q.Accuracy analysis of forward image displacement compensation device for aerial scan color CCD camera[J].Optics and Precision Engineering,2012,20(11):2439-2443.(in Chinese)
[4] 远国勤,丁亚林,惠守文,等.彩色大面阵航空测绘相机前向像移补偿分析及误差纠正[J].光学学报,2013,33(1):0128001-1~0128001-9.Yuan G Q,Ding Y L,Hui S W,et al.Analysis of forward image displacement compensation and error correction for area scan color CCD airborne mapping camera[J].Acta Optica Sinica,2013,33(1):0128001-1~0128001-9.(in Chinese)
[5] 范伟,余晓芬,奚琳.压电陶瓷驱动系统及控制方法研究[J].光学精密工程,2007,15(3):368-371.Fan W,Yu X F,Xi L.Research on driving system and controlling means of PZT [J].Optics and Precision Engineering,2007,15(3):368-371.(in Chinese)
[6] 廖胜凯,刘银年,陈小文,等.采用压电陶瓷驱动器的高频像移补偿系统[J].红外与激光工程,2011,40(3):539-543.Liao S K,Liu Y N,Chen X W,et al.High frequency motion compensation system based on PZT actuator[J].Infrared and Laser Engineering,2011,40(3):539-543.(in Chinese)
[7] 张景国,丁亚林,田海英,等.一种彩色面阵CCD测绘相机前向像移的补偿方法[J].应用光学,2011,32(3):460-463.Zhang J G,Ding Y L,Tian H Y ,et al.A compensation method of the forward image motion for a color plane array CCD mapping camera[J].Journal of Applied Optics,2011,32(3):460-463.(in Chinese)
[8] 刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2012.LiuJ K.Advanced PID control MATLAB simulation [M].3rd ed.Beijing:Publishing House of Electronics Industry,2012.(in Chinese)
