基于行为的UUV推进操纵系统异常辨识方法研究*
2015-05-09严浙平赵锦阳李本银
严浙平,赵锦阳,李本银
(哈尔滨工程大学自动化学院,哈尔滨 150001)
基于行为的UUV推进操纵系统异常辨识方法研究*
严浙平*,赵锦阳,李本银
(哈尔滨工程大学自动化学院,哈尔滨 150001)
在感知系统正常工作情况下,从行为学的角度出发,对UUV推进操纵系统异常进行辨识。根据UUV动力学方程设计滑模观测器,与传感器获得的信息进行实时比较,监测系统是否发生异常;当推进操作系统发生异常时,根据根据传感器实时获得的UUV位姿速度信息和推进操纵系统空间分布特点,从辨识行为库中匹配特定的辨识行为,实现对异常点的准确定位,再按照设计的模糊规则得到推进操纵系统异常点的危害程度,以采取相应的应急措施。最后,结合UUV右主推及卡舵异常情况,对基于行为的推进操纵系统异常辨识、异常点定位及异常级别判定方法进行了仿真验证。
无人水下航行器(UUV);推进操纵系统;异常辨识;行为
我们的地球绝大部分是被海洋覆盖的,而海洋拥有十分丰富的资源,UUV在开发利用海洋资源中可以扮演重要角色,在海洋管道的铺设、海洋考察和数据采集、钻井平台的管理维护等都可以看到UUV的身影[1]。UUV高度智能化是发生趋势,而自身的可靠性是其完成各种复杂任务的基础,这需要UUV对自身的运动状态能够实时的监测,避免发生不可挽回的后果[2]。在实际应用中,UUV的推进操纵系统的故障发生率较高,并且推进操纵系统故障对UUV的运行状态的影响往往是致命的,因此本文围绕着推进操纵系统故障展开。
针对UUV推进系统异常的辩识方法国内国外已进行较广泛的研究。美国夏威夷大学研制的“ODIN”号水下机器人根据某推进器期望的输出电压与实际输出电压的残差大小,则说明此推进器工作状态是否异常[3],并采取应对措施。国内学者也有对UUV的推进器故障诊断进行了相关研究,张铭均等采用模糊逻辑与神经网络结合的技术进行执行机构的状态检测,得到执行机构的工作状态的优劣程度[4]。朱大奇等人提出了一种基于递归神经网络的故障辨识模型[5],根据水下机器人实际输出与估计输出间的误差学习调整隐藏层与输出层权矩阵,将两个神经网络输出的故障信息分别与设定的阈值相比较,来判断执行器故障或传感器故障。上述文章所用的方法都是通过残差来进行故障进行诊断,而本文受到行为学的启发,通过残差的特点,匹配特殊的行为,实现故障点的定位以及故障危害程度的判定。在20世纪80年代后期,美国青年学者Brooks成功地制造出了第1个基于“感知-行为”模式的轮式机器人Allen[6-7]。UUV的行为整体可以分解成若干子行为,UUV的基本行为包括:定向航行行为、定速航行行为、目标趋向行为、循迹航行行为、定高航行行为、定深航行行为等。一个状态的出现是系统行为动作的结果,而状态又描述了系统的行为。所以在UUV完成上述行为的过程可以通过位置状态、速度状态来进行描述。只有在推进操纵系统状态良好的情况,上述行为才能得以准确的实现。
文章研究的是一种欠驱动UUV系统,UUV的速度信息可以通过传感器实时获取,UUV的纵倾和横倾角度可以通过姿态传感器实时获得,由水声定位系统可获得UUV北向距离、东向距离信息[8,15]。文章主要提出被动式故障诊断和主动式故障诊断两种诊断方式。在UUV工作状态时,采取被动式故障诊断方式监测UUV的行为是否发生异常,当UUV的行为发生异常时,UUV根据异常行为的特点采取主动式故障诊断,采取特定的辨识行为,实现对异常点的准确定位,并进行危害级别的判定,以此作为UUV采取应急措施的依据。本文主要基于UUV的行为,对推进操纵系统进行异常辨识,该辨识过程主要分为3个阶段:异常存在性辨识、异常点定位以及异常危害级别判定,对推进操纵系统异常辨识方法流程如图1。下面对UUV执行机构的异常辨识的流程及方法进行详细的论述,并作相应的仿真验证。

图1 UUV推进操纵系统异常辨识方框图
1 工作状态下的被动式故障诊断策略
UUV在工作状态下通过被动式故障诊断来实时监测UUV位置姿态等信息,具体来说是由滑模观测器得到推进操纵系统的工作状态[9-11]。
1.1 滑模观测器设计
由UUV六自由度运动方程易得出UUV系统动力学方程[7]:

(1)


图2 UUV空间坐标系[8]
式(1)进行变形整理可将UUV动态方程表示为下式:

(2)


(3)

定义非线性滑模观测器如下:
(4)

Λ1=diag(λ11,λ12,…,λ16)Λ2=diag(λ21,λ22,…,λ26)

(5)
(6)
(7)
进一步可推得
(8)


1.2 基于滑模观测器的异常行为辨识

y=x1+α(t-T)f(t)+v
(9)
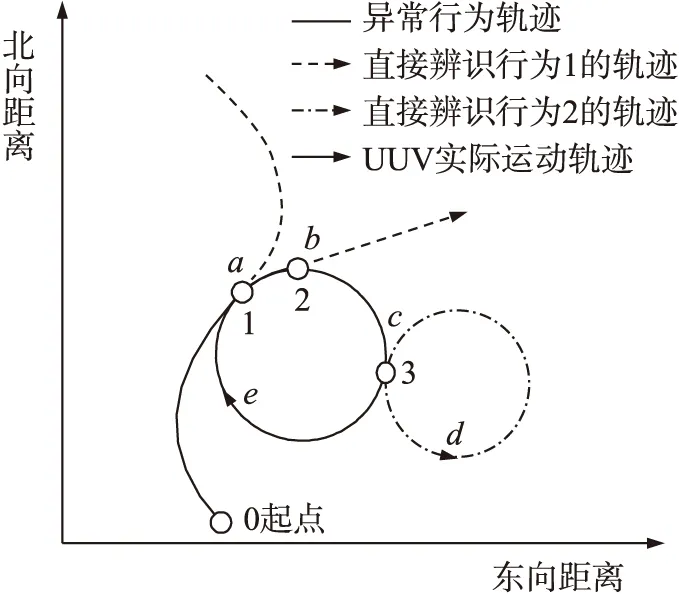
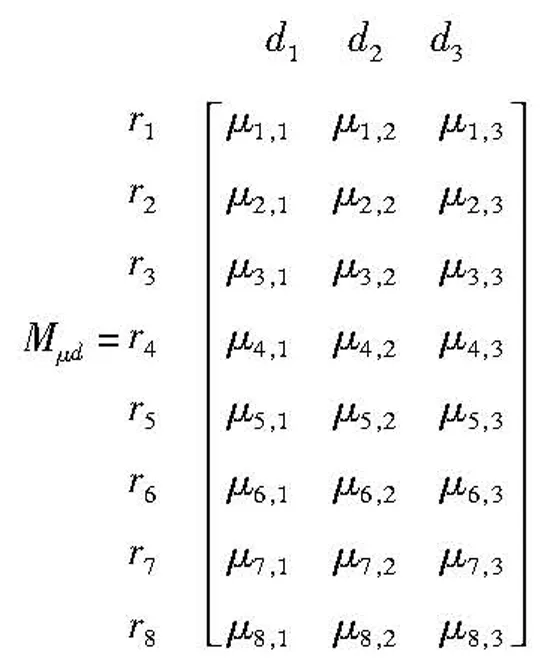
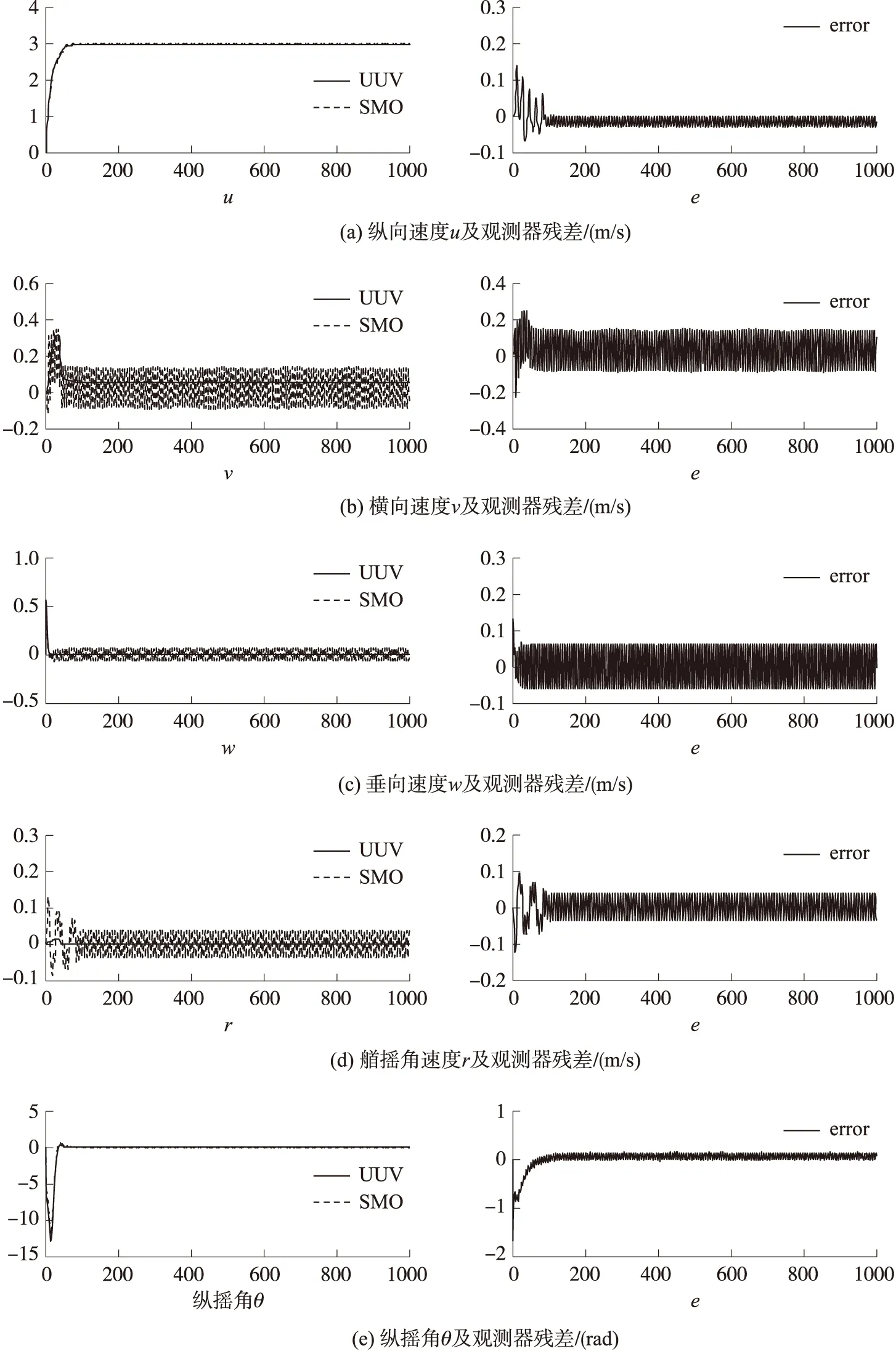
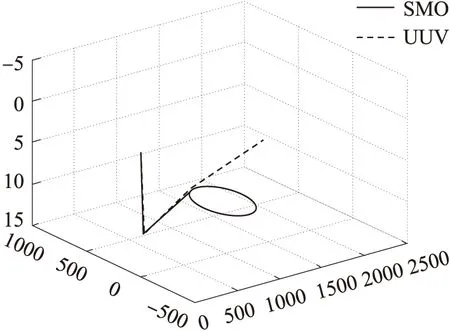
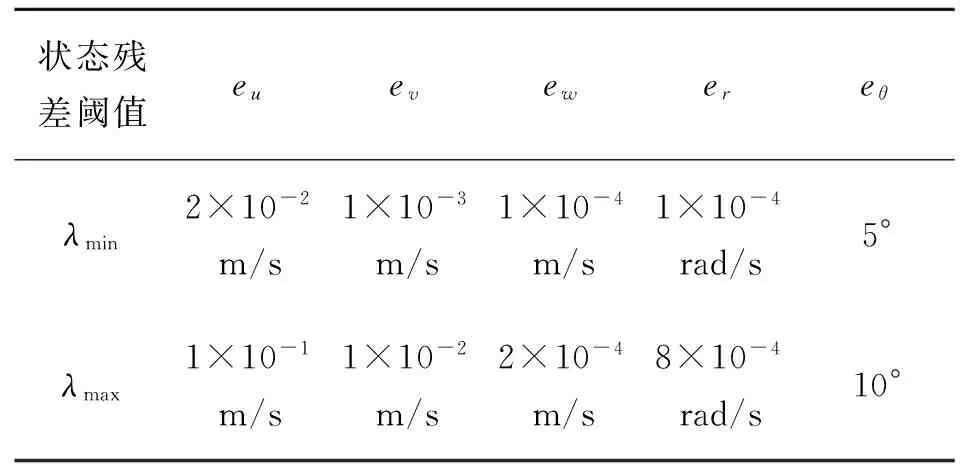
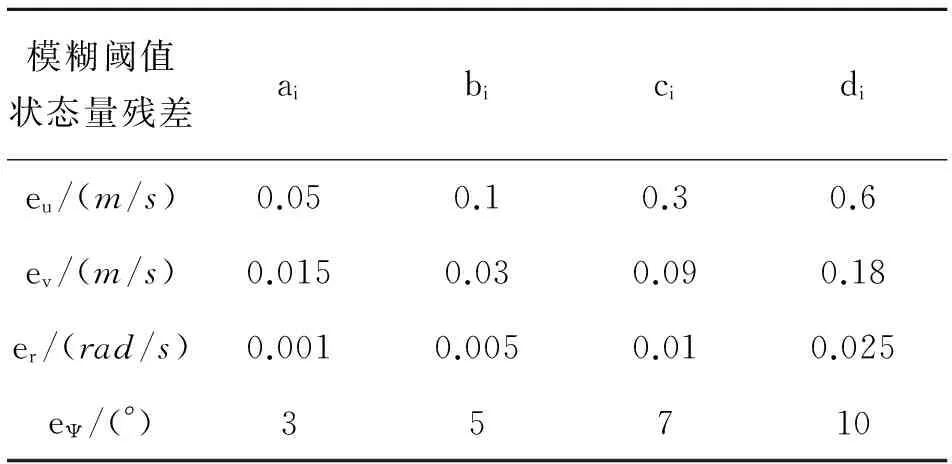
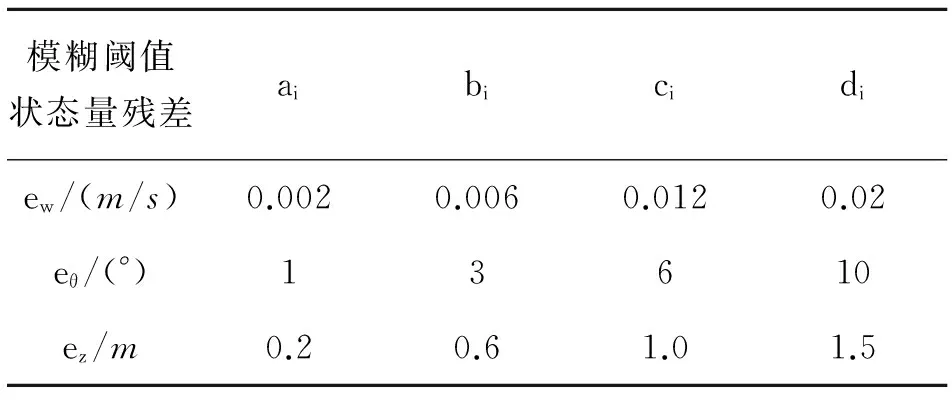
式中T为异常发生时刻,α(·)为阶跃函数,当t K的取值视实际情况而定,K取得过小,则容易造成误警,若K取得过大,则对异常的检测灵敏度降低。 (10) 和N个系统输出值: {xi(k-N),xi(k-N+1),…,xi(k-1)} (11) 检验目标函数为: H0:me(k,N)=m(k,N) (12) H1:me(k,N)≠m(k,N) (13) 构造统计量如下式: (14) 其中me(k,N),m(k,N),se(k,N),s(k,N)分别计算观测值及系统输出值的均值和方差。可以证明,当H0成立时,U服从渐近正态分布。将系统置信度设为1-α,当|U|>uα/2时,其中uα/2为上侧分位数,此时H1成立,可判定系统异常。若|U| 2.1 UUV异常辨识行为制定 滑模观测器输出值与UUV当前行为息息相关,观测值与UUV系统输出值间的残差ei大小会因当前行为和外界扰动而有所差异,简言之,对于相同UUV异常情况,UUV在执行不同行为时,残差大小不同,很可能引起误警、漏警。同时垂直舵和左右推进器存在耦合关系,仅仅根据实时获得的残差不能准确的定位出推进操纵系统的异常点和判定异常危害级别,主动式故障诊断策略由此提出。 为使UUV在进行异常点定位及异常危害级别辨识有一个共同的参考体系,文章提出设计辨识行为库,对不同的辨识行为定义优先级,按照一定顺序进行异常辨识。当滑模观测器辨识出当前状态可能发生异常,UUV自主选择辨识行为,目标辨识行为状态数据与系统实际行为状态数据的偏差,以完成对自身的异常点定位及异常危害级别判定。当通过滑模观测器得出UUV当前可能存在异常,实际辨识过程中可能仅仅通过一种辨识行为可能无法定位异常点,这需要多种辨识行为组合来完成异常点的定位和危害级别判定。 根据研究对象UUV特性,设计简单辨识行为定向定深匀速航行,垂直舵满舵下的定速定深航行等。以定向匀速直行为例,当某推进器发生异常后,左右推进器产生差动力矩,而艏向反馈进行PID控制,垂直舵具有一定的补偿作用,若舵产生的力矩足够大,则仍可以保持航向,推进器与垂直舵耦合作用使得分析较复杂,无法通过简单的辨识行为实现对异常点的准确定位,下面对辨识行为进行定义。 (1)直接异常辨识行为:通过执行单一异常辨识行为辨识故障是否发生或者进行故障的定位。例如取UUV异常存在性辨识时间窗K前一时刻的艏向的延长直线,UUV做定向定深航行行为。 (2)间接异常辨识行为:通过按顺序执行两种或两种以上的直接辨识行为实现对异常点的定位,通常情况下间接辨识行为是两种或两种以上直接辨识行为的组合。间接异常辨识行为可对推进器异常与垂直舵异常进行解耦合,对推进器进行异常辨识通常需采用间接异常辨识行为。 图3 垂直舵卡右舵异常辨识过程 图3所示的垂直舵卡左舵异常辨识过程,以0起始点开始,运动到1点发生异常,若干个时间窗后,在2点由观测器得到UUV的推进操纵系统可能发生异常后,UUV自主选择异常辨识行为,一定时间内,沿原方向进行定向定速定深航行行为,目标轨迹如b所示,一定时间后,UUV运动到3处,可以得到UUV推进操纵系统确实发生异常,但无法确定是垂直舵还是推进器发生异常,在3点开始设计垂直舵左满舵下的定深定速航行目标轨迹如所示,实际运动轨迹如图3所示。 2.2 规则库定位UUV异常点及异常类型 研究对象UUV在艉部有左右两个推进器、水平舵与垂直舵。水平舵用于控制UUV的俯仰角;垂直舵用于控制UUV的艏向角;推进器主要用于控制UUV的航速,UUV差动时也会对艏向角造成影响,为研究问题方便,作如下假设: 假设1 假设UUV感知系统正常工作,传感器的输出数据可靠; 假设2 当UUV正常工作时,UUV航向由舵单独控制不通过推进器差动输出方式控制艏向; 假设3 为简化辨识规则,本文假设UUV在某一时刻只有一种异常发生; 假设4UUV左右完全对称,不考虑横倾角与横倾角速度的变化。 本文异常模式fn的取值为左推进器异常、右推进器异常、垂直舵卡右舵、垂直舵卡左舵、水平舵卡上舵、水平舵卡下舵6种。ri的取值为u、v、w、r、θ等数据项的残差,Mf的第i行第j列取值为“0”、“1”、“-1”,分别表示“小偏差”、“较大正偏差”、“较大负偏差”。UUV执行辨识行为指令时,不同异常模式对应实际理想的残差特性如异常点定位规则矩阵Mf所示,但实际f1、f4和f2、f3对应的故障模式对应的残差特性存在相似性,往往需要再启动异常辨识行为。 (15) 2.3 模糊规则判定异常危害级别 由于存在测量噪声及干扰,基于阈值的危害级别判定是不连续,有可能导致误判。针对这一问题,本文将模糊逻辑引入UUV异常危害级别辨识中,对于异常级别辨识,取u、v、w、q、r、θ、ψ、z 8个变量作为异常危害级别分析参考量,当按原方向进行定向定深航行时,实际定向航行控制过程中,由于存在实际扰动,UUV实际运动轨迹不可能与直线完全契合,针对某种异常对每个数据项残差ri定义模糊隶属度函数,其中μi,1、μi,2、μi,3分别表示项残差ri隶属于“正常”、“小偏差”、“大偏差”3个级别的隶属程度。如图4所示。其表达式如下: 图4 模糊规则隶属度函数 由模糊异常级别辨识器可得到模糊异常级别辨识矩阵: (16) 式中d1、d2、d3分别表示“正常工作”、“一级异常”、“二级异常”。根据异常点特性,取权重s矩阵A=[a1,a2,…,a8],推进器异常A=[1,1,0,0,1,0,1,0],垂直舵异常A=[1,1,0,0,1,0,1,0],水平舵异常A=[0,0,1,0,0,1,0,1],特定的异常级别隶属度δl可由下式计算得到: (17) δl的值越大说明某特定异常的异常级别为l的可能性就越大。若通过式(15)辨识出UUV存在某种异常时,则必须利用式(17)计算δl,从而得出该异常的异常级别。 本文基于行为的推进操纵系统异常辨识主要分为3个步骤,即: 步骤1 异常存在性判定:利用滑模观测器对UUV当前行为进行观测,通过比较滑模观测器输出与UUV实际状态输出辨识出异常是否可能存在; 步骤2 异常点辨识:当辨识出当前UUV存在异常,则执行辨识行为,比较直接辨识行为与UUV当前行为状态,可确定UUV行为是否确实发生异常,提高诊断的准确度,根据制定的异常点定位规则库,进行异常点的定位; 或者执行第2种直接辨识行为,构成间接辨识行为对异常点进行定位,具体过程与直接辨识行为相同; 步骤3 异常级别辨识:当实现异常点的定位之后,进行危害级别的判定,比较辨识行为与UUV当前状态间残差与设定的模糊阈值,求出每个状态异常级别隶属度,进而通过式(17)辨识出异常级别。 3.1 滑模观测器及异常行为辨识规则库验证 建立UUV运动模型,本文使用的研究对象UUV模型中的水动力系数是通过UUV水动力实验得到,为验证UUV异常行为辨识算法正确性,首先验证UUV滑模观测器的性能,设定UUV初始艏向角ψ=0°、俯仰角θ=0°,给定指令艏向角为20°,正常工作时左右主推的推力F=600N,使UUV在水平面沿直线匀速航行,航行时间为1 000s。如图5滑模观测器可对u、v、w、r、θ进行较准确的实时估计。 图5 滑模观测器的性能验证 验证异常点定位规则库的正确性,需要分别对UUV左主推异常、右主推异常、垂直舵卡右舵、垂直舵卡左舵、水平舵卡上舵、水平舵卡下舵6种执行机构异常模式的辨识规则库进行验证,下面以左主推异常为例进行验证。在第400s时设定UUV左主推推力减半,图6UUV空间运动轨迹及滑模观测器估计轨迹。可以看出此时u、v发生跳变,由此特征可以滑模观测器辨识出UUV存在异常;但由于研究对象UUV的航向为闭环控制,当推进器异常时,UUV会控制舵角以尽量保持航向,所以可以看到观测器估计的轨迹是垂直舵打右舵航行。由图7仅仅依靠残差结果无法准确定位异常点,需执行异常辨识行为。 图6 UUV空间运动轨迹及滑模观测器估计轨迹 图7 左主推异常仿真图 分别上述6种异常进行仿真验证之后,可知UUV推进操纵系统异常与当前运行状态间的残差存在一定规则,式(15)中定义的异常点辨识规则库符合UUV实际状态。 3.2 异常点定位及异常级别辨识仿真验证 基于行为对UUV推进操纵系统异常辨识进行仿真,设UUV的初始行为为以60度艏向角,左右主推推力各为500N,保持匀速直航,航行时间为1 000s。在第400s时设定右主推推力减半、垂直舵卡右舵两种异常状况,进而检验本文提出的异常辨识方法的有效性。 3.2.1 异常存在状况辨识 本仿真实验选取滑模观测器增益矩阵为: Λ1=diag(0.4,0.1,0.03,0.003,0.002)Λ2=diag(3.2,2,2.5,1.5,1) 设置利用滑模观测器进行UUV异常行为辨识时的状态数据残差阈值如表1所示。由于当UUV在低速度工作状态时发生异常残差ei变化并不明显,因此规定若其中一个状态数据项诊断出异常则诊断UUV异常执行异常辨识行为。 表1 UUV推进器异常行为辨识状态残差阈值表 对本实验初始左右主推各500N推力,当UUV右主推推力减半时,由于航向控制为闭环控制,当右主推推力减半时UUV会通过摆舵产生舵力矩而尽量保持航向,艏向角变化约为2.13°,艏向角速度最大为0.008rad/s,横向速变化为0.37m/s。推力变化最直接的影响是纵向速度,推力减半后UUV的纵向速度减小0.6m/s。垂直舵卡右舵时,u、v、r也将发生相应的变化。利用滑模观测器观测UUV状态残差可以判断UUV行为发生异常。 3.2.2 异常点定位及异常危害级别判定 图8 右向偏移型故障诊断过程 首先辨识到推进操纵系统发生异常后,由于这段时间较短,基本忽略,所以当UUV自主执行垂直舵零舵角的直接辨识行为1时,其目标轨迹基本与正常轨迹重合,此处不予画出,而用正常轨迹代替。首先按照当前UUV的速度推力状态按垂直舵零舵角执行直接辨识行为,在一定时间内,我们可以根据当前位置与起始速度切线的距离得到UUV是否定向航行。如果能按原方向运动我们可以断定滑模观测器得到警报是误判,尽管这种情况发生的概率很小,则诊断结束;否则说明UUV确实发生的是偏移型故障,UUV需执行其他直接辨识行为,采取垂直舵左满舵航行,如果r没有发生跳变,则说明发生的是垂直舵卡舵型故障;如果r发生跳变说明是由推进器推力故障引起的。显然我们可以得到图8中左图发生的是推进器故障,右图发生的是垂直舵卡舵故障。 异常危害级别的判定是根据直接辨识行为1的过程获得的状态数据以及直接辨识行为2得到异常点定位结果之后,进行计算得到。利用模糊规则判定左右偏移型异常危害级别时只考虑u、v、r、ψ的变化,模糊异常危害级别辨判定中各阈值设定如表2所示;当水平舵异常时,UUV将以固定的纵倾角上浮或下潜,因此纵倾角速度经短时间波动后最终将变为零,故而在模糊规则对水平舵异常级别进行分析时只考虑w、θ和z的变化,其模糊规则各阈值的设定如表3所示。 表2 推进器异常级别判定模糊规则各阈值设定 表3 水平舵异常级别判定模糊规则各阈值设定 经上述分析可知,在直接辨识行为1过程中。得到各数据项残差,结合表2中及式(17)计算出不同状态值的异常隶属度,得到当UUV右主推推力减半时可诊断为一级异常,UUV垂直舵卡舵时可诊断为二级异常。 本文以UUV模型为基础建立滑模观测器,对UUV的姿态及位置信息进行估计,获取估计值与实际姿态及位置残差数据,由此辨识UUV行为是否可能发生异常;根据不同机构异常特征建立异常点辨识规则库,UUV自主执行异常辨识行为,基于异常辨识行为,利用异常辨识行为指令与UUV当前状态间的残差数据对照规则库实现UUV异常点的辨识,当利用直接异常辨识行为无法辨识出异常点时,执行间接异常辨识行为,对异常点进行再次辨识;最后根据零舵角下辨识行为与UUV实际状态间的残差数据,利用模糊规则判定异常点的异常级别。相比与原有方法,文章力图在根据滑模观测器得到的故障残差的基础上,通过执行辨识行为,给出一种误警率较低的,并且可以准确辨别故障点的解决方法。最后,本章还以右主推发生推力减半异常和垂直舵卡舵为例,验证了UUV异常辨识、异常点定位、异常危害级别判定方法是准确可行的,误警率也是较低的。 [1]徐玉如,苏玉民,庞永杰.海洋空间智能无人运载器技术发展展望[J].中国舰船研究,2006,6(3):1-4. [2]Takai M,Ura T.Development of System to Diagnose Autonomous Underwater Vehicle[J].International Journal of Systems Science,1999,30(9):981-988. [3]Tarun Kanti Podder,Nilanjan Sarkar.Fault-Tolerant Control of an Autonomous Underwater Vehicle under Thruster Redundancy[J].Robotics and Autonomous Systems,2001,34(1):39-52. [4]王玉甲.自主式水下机器人推进器及舵状态监测研究[D].哈尔滨:哈尔滨工程大学,2003. [5]袁芳,朱大奇,刘乾.基于递归神经网络的水下机器人故障辨识[J].控制工程,2011,18(5):783-787. [6]刘宜平,沈毅,刘志言.一种基于模糊神经网络的故障分类器及其在多传感器故障诊断中的应用[J].传感技术学报,2000,13(1):38-43. [7]Guo Hualing,Deng Jiahao,Cai Kerong.High-Speed Moving Target Recognition Technology Based on Multi-Sensor Data Fusion Information Technology and Applications(IFITA)[C]//2010 International Forum on Volume 2.2010:20-22. [8]李殿璞.船舶运动与建模[M].哈尔滨:哈尔滨工程大学出版社,1999. [9]周佳加.基于扁平UUV动力学模型的导航定位与路径跟随控制方法研究[D].哈尔滨:哈尔滨工程大学,2011. [10]Bian X,Yan Z,Chen T,et al.Mission Management and Control of BSA-AUV for Ocean Survey[J].Ocean Engineering,2012,55:161-174. [11]边信黔,牟春晖,严浙平,等.基于故障树的无人潜航器可靠性研究[J].中国造船,2011,52(1):71-79. [12]Karim Salahshoor,Mojtaba Kordestani,Majid S Khoshro.Fault Detection and Diagnosis of an Industrial Steam Turbine Using Fusion of SVM and ANFIS Classifiers[J].Energy,2010:1-11. [13]Patron P,Miguelanez E,Petillot Y R.Adaptive Mission Plan Diagnosis and Repair for Fault Recovery in Autonomous Underwater Vehicles[J].Oceans,2008,55(11):3954-3963. [14]刘彬,王霄,谢平.基于小波多重分形的复杂机械故障诊断方法研究[J].传感技术学报,2006,19(1):232-234. [15]李炳森.基于行为的模块化AUV决策控制系统及其仿真实现[D].中国海洋大学,2009. A Fault Diagnosis Method for UUV Propulsion System Based on Behavior* YANZheping*,ZHAOJinyang,LIBenyin (College of Automation,Harbin Engineering University,Harbin 150001,China) An algorithm of propulsion system fault diagnosis for UUV is proposed in this paper.Firstly,we design sliding mode observer based on the kinetic equation to discriminate the presence of abnormal point in the propulsion system.Secondly,according to the characteristics of UUV propulsion system,we develope abnormal identification tasks and abnormal point location rule to identify outliers.At the same time,we design the fuzzy rules to identify the abnormal level.At last,the method used to identify the abnormal behavior is simulated in case of the right thruster abnormal.The results show that the method above is effective and feasible. UUV;propulsion system;fault diagnosis;action 严浙平(1972-),男,教授,博士生导师,主要研究方向检测技术与自动化装置、水下机器人集成和控制、无人现场智能控制、系统综合仿真与验证,yanzheping@hrbeu.edu.cn; 赵锦阳(1988-),男,哈尔滨工程大学研究生,研究方向水下航行器故障诊断研究,zhaojinyang12345@sina.com。 项目来源:国家自然科学基金项目(51179038) 2014-01-29 修改日期:2014-10-21 C:7320E;0170L 10.3969/j.issn.1004-1699.2015.01.012 TP277 A 1004-1699(2015)01-0062-09

2 主动式故障诊断策略



3 基于行为的执行机构异常辨识仿真验证


4 总结