一种简易通用的敲击触发式惯性导航系统时间同步装置设计*
2015-05-09牛小骥郭文飞罗国军王青江
张 辉,牛小骥*,郭文飞,翟 冰,罗国军,王青江
(1.武汉大学卫星导航定位技术研究中心,武汉 430079;2.武汉大学电子信息学院,武汉 430072)
一种简易通用的敲击触发式惯性导航系统时间同步装置设计*
张 辉1,牛小骥1*,郭文飞1,翟 冰2,罗国军2,王青江1
(1.武汉大学卫星导航定位技术研究中心,武汉 430079;2.武汉大学电子信息学院,武汉 430072)
科学研究与工程实践中常需要利用多种传感器协同工作获取被测目标的动态信息,此时对不同传感器采集的数据进行时间同步是必要前提。提出了一种以“敲击-脉冲”信号为媒介的时间同步方案,通过能够在敲击瞬间产生脉冲信号的时间同步装置实现惯性导航系统等运动传感器与其他脉冲同步传感器的时间同步,并通过实验验证了其可行性和时间同步精度。与传统的硬件方案或软件方案时间同步技术相比,本方案通用性极强,开发工作量小,操作简单方便,适用于对时间同步精度要求不高的传感器或系统的快速试验评估。
惯性导航系统(INS);时间同步;GNSS接收机;脉冲信号;多传感器;数据融合
科学研究与工程实践中经常需要利用多种传感器采集不同种类相关信息或对同一目标量采用不同方法进行冗余观测,如在移动测图中,需要同时利用GPS接收机、LIDAR、全景相机、INS等分别采集图像和位置信息。对于不同传感器采集的数据进行精确的时间同步在实际应用中具有重大意义。INS作为位置、速度和姿态传感器,在与其他种类传感器进行数据融合解算之前,对INS与其他传感器的测量数据进行高精度的时间同步是必要前提。为此需要额外的硬件和软件来赋予各传感器数据统一的时标。但是二者往往由于存在时间起点和基准不一致、数据输出速率不一致、电路延迟等因素,为INS与其他种类传感器时间同步对准造成困难[1],而且相应的软硬件开发调试的工作量大、开发周期长,不利于对多传感器集成系统的快速验证。
以常见的INS/GNSS组合导航系统为例。针对INS与GNSS时间同步的问题,国内外进行了广泛的研究。概括起来有软件方法[2-3]、硬件方法[4-7]、软硬件结合的方法[8-12]。其中软件方法为了实现高精度时间对准往往算法设计复杂,计算量大,而且精度有限;采用专门设计的INS/GNSS集成同步电路能得到较好的同步效果,但是这种硬件同步方案往往针对特定设备,对开发人员的硬件设计与实现能力要求较高,且成本高,研发周期长。近年来,低成本、种类繁多的低精度且缺少稳定内部时钟的MEMS传感器开始普及。应用中急需一种操作简单、通用性强的时间同步设备,来对上述传感器性能进行快速实验评估。
本文针对上述惯性导航系统与其他传感器的时间同步问题,提供一种简单、方便、通用性强,并能保证一定同步精度的敲击式时间同步方案,并给出实验测试结果及误差分析,验证了其可行性。
1 设计方案
本方案工作原理如图1所示。在数据采集过程中,可以在选定的时间点(如起始、中间、结束部分),通过本装置敲击IMU,由IMU捕捉到对应的特征波形(通常敲击会使加速度计输出波形出现尖峰);同时,触发本装置的脉冲生成电路产生电压跳变,可将跳变电压作为脉冲信号,经调理后,接入待同步设备中,触发待同步设备做出特定开启、关闭,或者记录时标等动作。通过数据后处理,匹配特征波形和对应的时间标签,可进行各设备间的同步。
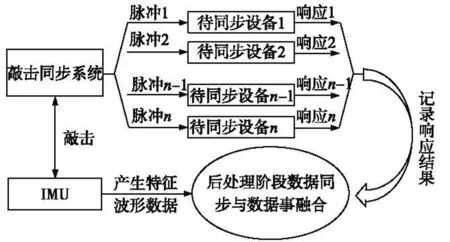
图1 装置工作原理图
设备的硬件部分是一个敲击同步装置,包括依次相连的敲击机构、脉冲生成电路、脉冲调理电路和脉冲输出接口电路,如图2所示。
敲击机构如图3所示,一个可前后伸缩的锤头套在管筒内,锤头末端和管壁连有金属触点,形成一个常闭开关,当敲击时,锤头受力缩回,开关断开。
脉冲生成电路如图4所示,用于在锤头敲击(开关开闭)时产生电压跳变。根据不同的待同步设备,可以通过选择开关,选择产生上升或下降的电压脉冲信号。
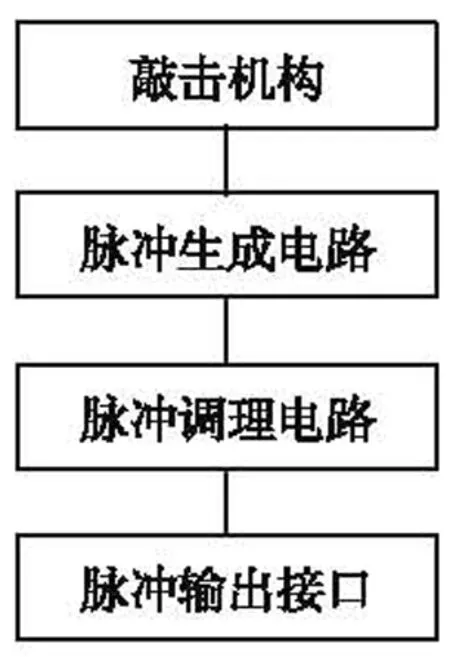
图2 硬件方案结构图
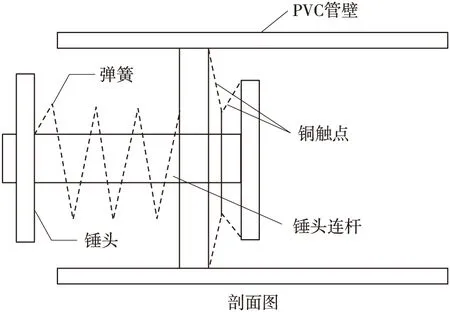
图3 敲击机构结构设计图
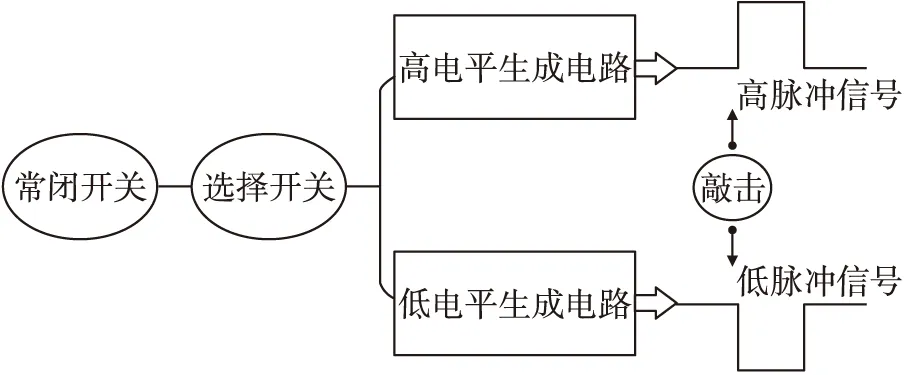
图4 脉冲生成电路结图
脉冲调理电路根据接入设备的实际需要调节脉冲电压、宽度和形状,此处不给出具体设计。
依据上述设备原理对响应时标误差分析如下:认为敲击以相同的概率发生在IMU采样间隔中间的任意一点,假如不考虑其他误差,大量敲击的平均发生时刻将依概率收敛到IMU采样间隔的中点,而IMU只能在敲击发生后的第1个采样点记录到波形跳变,即待同步设备记录的脉冲发生时刻将比对应IMU波形提前半个IMU采样周期。
实际应用中,通过本装置和GPS接收机为内部时钟不稳定的IMU所采集的数据打GPS时标。在采集过程前后两次敲击IMU,通过与两次敲击匹配的时标及采集到数据的总个数,内插出每一采样数据的时标。应用本方法需假设IMU采样间隔均匀。对内插时标的误差分析如下:
假设t1,t2为真实的敲击发生时刻,q1,q2为接收机记录到的敲击时刻,e1,e2分别为前后敲击时刻真值与记录值的偏差。
e1=q1-t1
(1)
e2=q2-t2
(2)
e1,e2>0,说明记录有延迟,e1,e2<0说明记录超前。
真实采样总时长为:
(3)
记录的采样总时长为:
(4)
设采样无数据丢失,共进行n次采样,真实采样间隔为:
(5)
记录的采样间隔为:
(6)
采样间隔误差:
(7)
当e2=e1时:
内插数据时标与真值在每一历元发生e1(或e2)的偏移。
当e2≠e1时:
2 实验及结果分析
为了验证上述基于“敲击-脉冲”信号的惯导时间同步方案的可行性,设计了以下两组实验。
实验1,将新方法应用于一套带有传统硬件时间同步的惯导设备。将该方法的时间同步结果与传统硬件同步结果对比,以此考核新方法的INS与GPS时间同步效果。
实验2,利用高精度GPS接收机,为缺少稳定精确内部时间基准的IMU数据打时标,并评定其内部时钟的误差水平。实验设备有:MTi-G;NovAtel DL-V3待验证敲击同步装置。
2.1 实验1
设置MTi_G采样频率为100 Hz,启用MTi_G的INS/GPS硬件时间同步功能。在此情况下,MTi_G内部时钟精度达到1 ppm[13],以此作为本实验参考时标。
实验中利用NovAtel DL-V3接收机的markcontrol命令开启事件响应功能。根据经验,命令中timeguard参数建议设为400 ms。
将敲击同步装置与Novatel DL_V3相连,利用本实验装置敲击MTi_G,使INS记录敲击时刻的特征波形,同时触发接收机记录敲击时刻的GPS时刻。
实验共进行了时长约1 h的数据采集,每隔5 min左右进行一组敲击,每组连续敲击10次。共进行了14组,共142次敲击,其中因为存在两次敲击未触发DL_V3响应,故补充敲击两次。第13组与第14组间隔较短。在整个采样过程中出现了一次丢数,丢数32个。实验中,将与参考时标相差0.02 s以上的错误记录剔除。敲击形成的加速度特征波形,如图5所示。
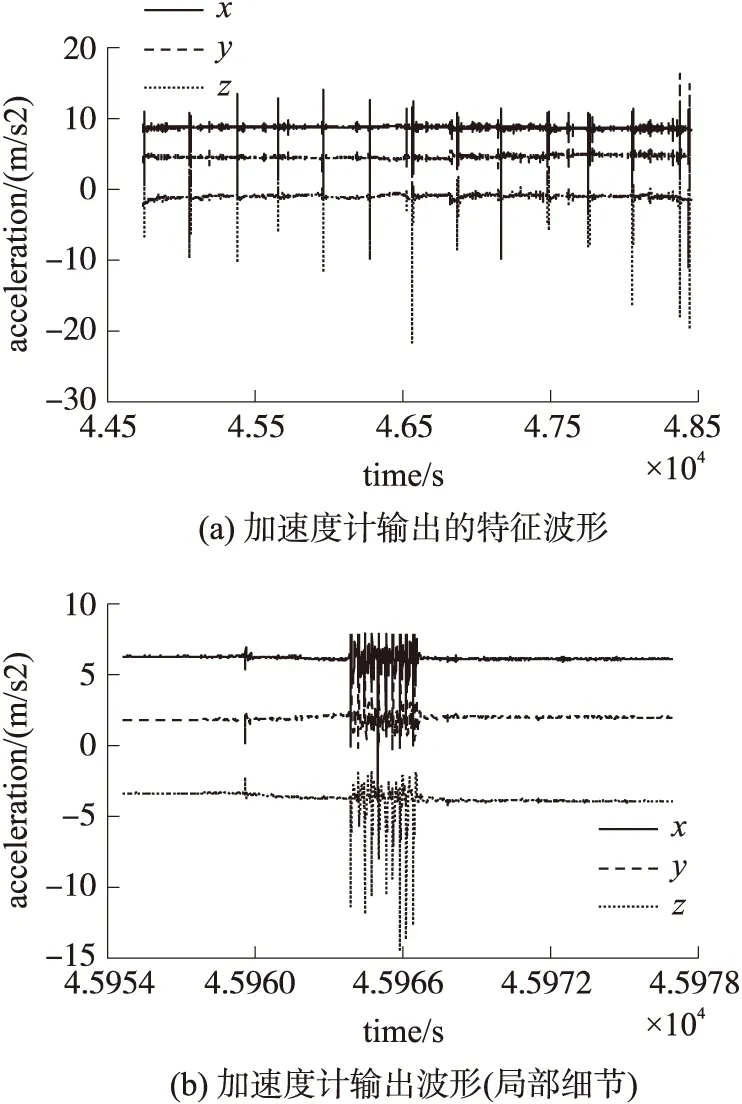
图5 加速度计输出的特征波形及局部细节
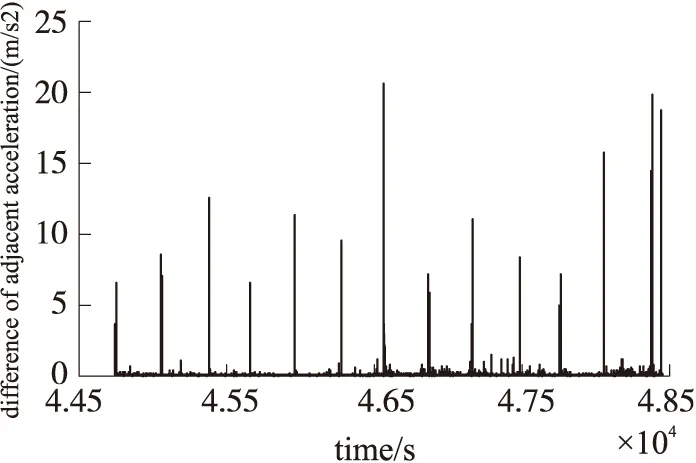
图6 Z轴加速度前后历元差的绝对值
其中图5(a)为完整的加速度计输出特征波形图,图5(b)为将其中一组敲击波形放大显示的图形。敲击主要在Z轴方向,故单独提取Z轴加速度计数据进行分析。
敲击发生的前后历元,加速度计输出发生阶跃变化,故对Z轴前后历元作差,并取绝对值,以突出敲击信号,波形如图6所示。
取脉冲波形上升段的第1个读数与接收机记录时标匹配,137次正确敲击响应匹配误差的均值为-0.006 597 s,标准差为0.005 482 s。时标匹配误差的分布直方图如图7所示。
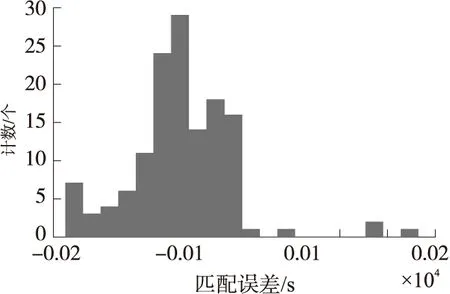
图7 时标匹配误差分布直方图
由统计数据可知,DL-V3记录的时标较参考真值超前-0.006 597 s。实验结果与第2节设备原理导致的误差分析结论较为符合。
为提高匹配精度和可靠性,提出以下改进方案:
①对所有敲击触发记录的时标,减去半个采样间隔(这里是0.005 s)的系统偏差改正。
②实际应用中采用多次敲击的方法,在实验开始和结束时,分别连续敲击两组。对每组时标取平均值,作为平均敲击时刻的记录时标,并以此作为内插标准。原因分析如下:

(8)
由记录到的时标构造的虚拟敲击时刻为:
(9)
二者的误差为:
(10)

由于敲击力量不大,本时间同步系统适用于轻型低精度惯性传感器与其他采样速率不高的传感器进行时间同步,同步敲击最好发生在惯性传感器动态较小的时候,以便于区分敲击造成的特征波形。建议各传感器采样速率不要大于100 Hz。
由上述实验结果可知,在进行系统误差校正后,本系统能给出约0.005 s的时间同步精度,通过多次敲击取平均时刻的办法,可以提高本系统的可靠性。
2.2 实验2
结合实验一的结果,通过本装置为未开启硬件时间同步的MTi_G打GPS时标,并评定其内部时钟精度。
设置MTi_G采样频率为100 Hz,关闭MTi_G的INS/GPS硬件时间同步,此时MTi_G输出时标仅由内部晶阵提供,MTi_G内部时钟精度为80 ppm~90 ppm[8]。
总采样时间内,时钟漂移误差需显著高于本同步装置分辨率。
利用MTi_G进行了3 h 20 min的数据采集,在80 ppm~90 ppm时钟精度下,MTi_G可能存在最大约1 s的时钟漂移,在本实验中不丢数的情况下,可能造成约100个历元的采样历元误差。
分别在数据采集的开始和结束阶段进行10次敲击。根据上述方法,分别求取平均后的虚拟敲击时刻。表2、表3给出了第1组和第2组敲击中GPS接收机记录到的敲击时刻与IMU波形确定的敲击时刻,并给出了二者之差,以及与二者记录的前后两次敲击的时间间隔。
敲击间隔的测量精度反应了系统的计时精度。MTi_G内部时钟短时间内精度高,MTi_G和GPS接收机分别记录到的敲击间隔可以用于评定敲击系统的同步性能。对上述两表格最后一列求平均,其均值约为0.0003 76 s,标准差为0.006 67 s(对应于实验一求得的两时间系统偏差的标准差0.005 482 s)
比较前后两组敲击,Novatel接收机通过脉冲响应记录到时标与MTi_G内部时标差的均值分别为0.088 6 s和0.095 6 s,两者相差0.007 0 s,此偏差包含观测噪声、设备噪声以及MTi_G内部时钟漂移。考虑3 h以上的数据采集时间,此偏差远远小于MTi_G内部时钟可能发生的最大漂移量。
由上述方法,对两组敲击时刻求平均,并改正由实验一、确定的系统偏差-0.006 597 s,确定出虚拟起始敲击时刻为33 564.274 828 394 s,虚拟结束敲击时刻为45 602.424 571 524 s,由此确定总采样时长为12 038.149 743 13 s,100 Hz频率下理应采集数据个数为1 203 815个,实际采集个数为1 203 813个,仅相差2个。说明此时间段MTi_G内部时钟漂移在0.03 s以内,由于等间隔采样,平均采样间隔误差在3×10-8s以内,符合实验预期。
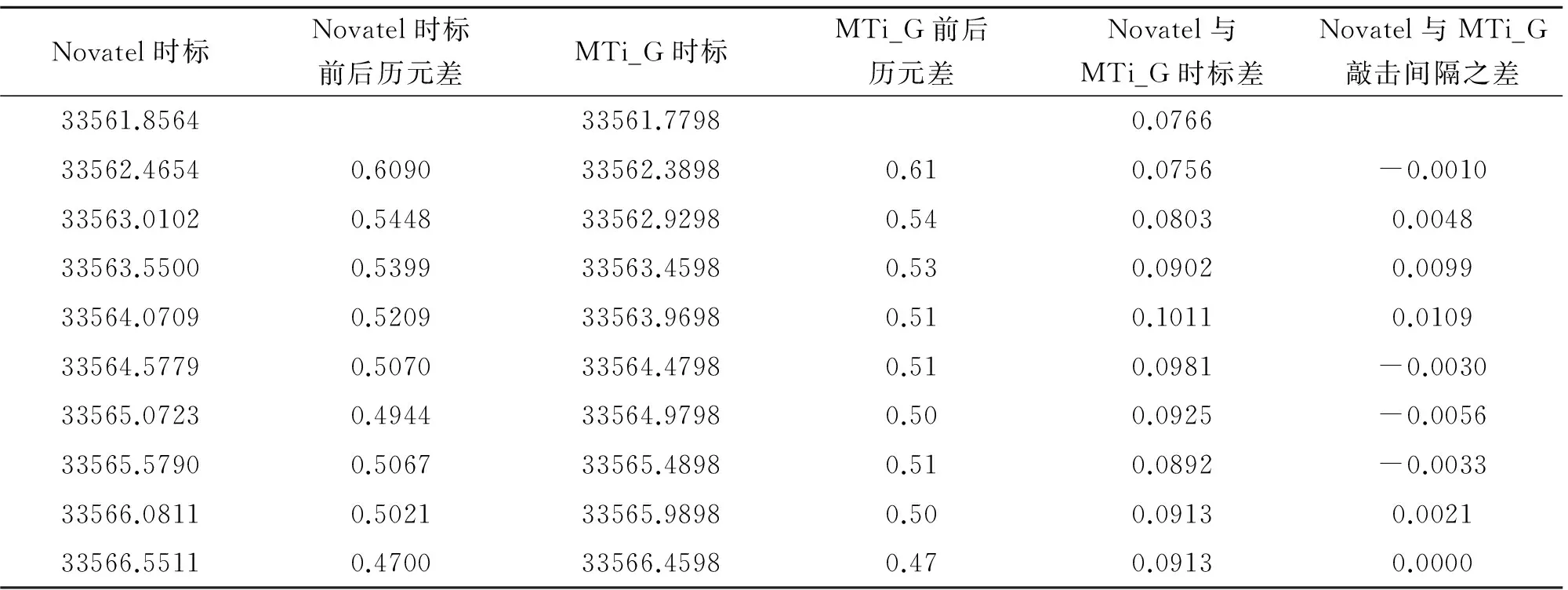
表2 第1组敲击时标对应表 单位:s
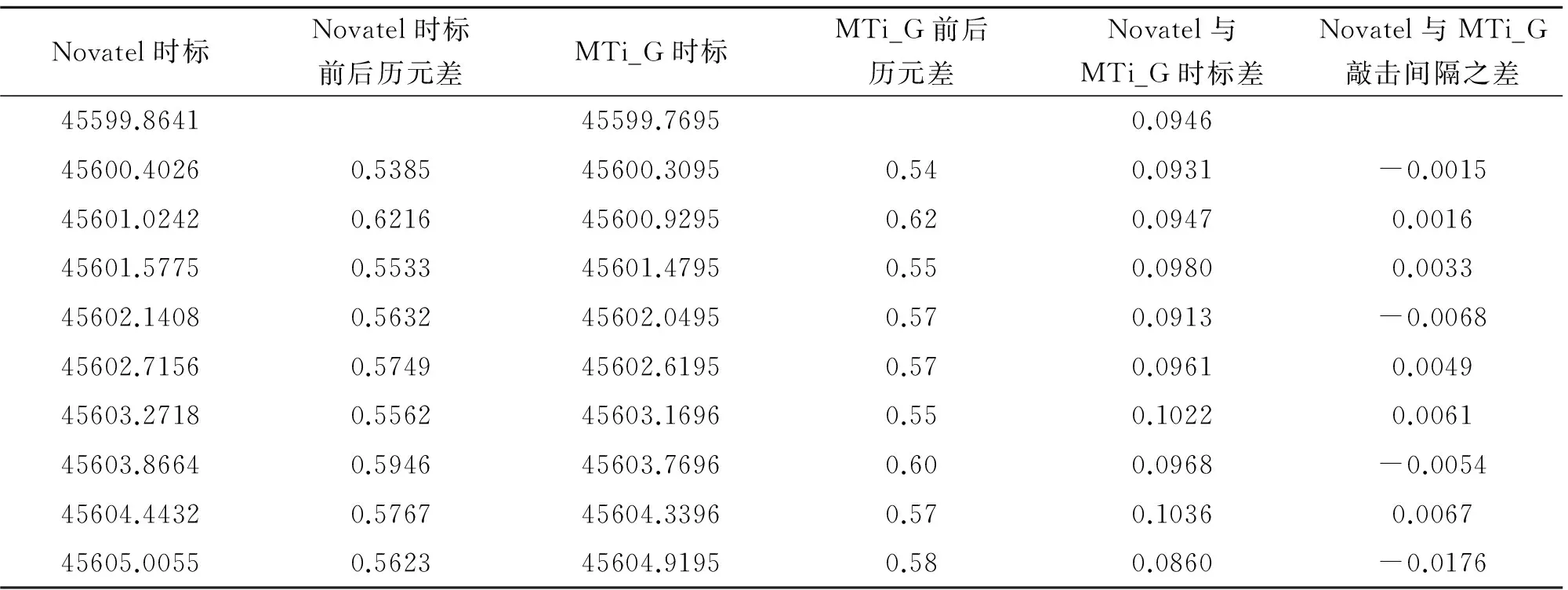
表3 第2组敲击时标对应表 单位:s
3 结论
本文研究设计了一种基于“敲击-脉冲”信号的惯导与其他类型传感器进行时间同步的方案,并进行了实验验证。两组实验结果表明,在进行了充分的误差补偿和粗差剔除的基础上,对于单次敲击时间同步,本方案能够提供半个IMU采样历元(例如100 Hz采样率时,0.005 s)的时间同步精度。通过连续多次敲击的方式,采用平均敲击时刻的方法可有效提高系统的可靠性。此外,还可以通过外部高精度时间参考(如高精度时钟,GNSS接收机等)粗略估计IMU内部低精度时钟的漂移。本敲击同步方案不需要对被测惯导进行任何硬件或软件改动,通用性强、操作简单、方便快捷,非常适用于对低精度惯导做快速测试评估的场合,作为INS(IMU)与其他种类的传感器(如GPS,LIDAR,摄像头等)进行时间同步的简易工具。
当利用本装置敲击IMU,使其加速度计输出波形产生尖峰,相当于人为引入了不真实的载体运动状态。对于车载导航,通常垂向速度保持稳定,以减小敲击对IMU导航性能的影响。相对于导航过程,敲击发生的次数少,时间极短,在有GPS辅助的条件下,对导航结果影响不显著。
下一步工作将进一步详细评估应用本装置时,所发生的敲击对IMU导航性能的影响。开发改进方案,进一步提高本时间同步方案的通用性,同步精度和可靠性。
[1]刘帅,孙付平,陈坡,等.GPS/INS组合导航系统时间同步方法综述[J].全球定位系统,2012,37(1):53-56.
[2]肖进丽,潘正风,黄声享.GPS/INS组合导航系统数据同步处理方法研究[J].武汉大学学报(信息科学版),2008,33(7):715-717.
[3]杨涛,王玮.GPS/SINS组合导航系统实现时间同步的软件方法[J].中国惯性技术学报,2008,16(4):436-438.
[4]张开东,吴美平.SINS/GPS组合导航中的一种高精度时间同步方案[J].战术导弹控制技术,2006,55(4):66-68.
[5]马云峰.基于DSP的MSINS/GPS组合导航计算机设计[J].微计算机信息,2007,23(6-2):180-181.
[6]艾银河,刘藻珍,王正杰.DSP/MCU并行双处理器结构在GPS/INS组合制导系统中的应用[J].测试技术学报,2002,16(专刊):565-570.
[7]刘广孚,张为松,李旭,等.IMU/GPS数据同步电路的研究与实现[J].仪器仪表学报,2006,27(6):1353-1354.
[8]张涛,徐晓苏,刘晓东,等.不同动态条件下组合导航系统的时间同步[J].中国惯性技术学报,2012,20:320-325.
[9]朱智勤,吴玉宏,羊远新.GPS/INS组合系统中时间同步的模块化实现[J].武汉大学学报(信息科学版),2010,35(7):830-832.
[10]张迪,钟若飞,鲁旭伟.无外触发的激光扫描仪的时间同步方法研究[J].激光与红外,2013,43(6):618-621.
[11]李倩,战兴群,王立端,等.GPS/INS组合导航系统时间同步系统设计[J].传感技术学报,2009,22(12):1752-1756.
[12]曾桓涛,余志,张辉,等.GPS/INS组合导航数据同步时标的计算方法研究[J].传感技术学报,2012,25(4):515-518.
[13]MTi_G User Manual and Technical Documentation:46.
A Universal INS Time Synchronization Solution Based on Punch Triggering*
ZHANGHui1,NIUXiaoji1*,GUOWenfei1,ZHAIBing2,LUOGuojun2,WANGQingjiang1
(1.GNSS Research Center,Wuhan University,Wuhan 430079,China;2.Electronic Information School,Wuhan University,Wuhan 430072)
Scientific researches and engineering applications usually require integrating the kinetic information of the same research object from different kinds of sensors.Synchronization of these data is the prerequisite of the integration.A synchronization solution using a kind of "punch-pulse" signal to link different sensors is presented.A special device(a hammer)is designed which can generate electrical pulse when it punches the motion sensors.The generated pulse will trigger other devices that need to be synchronized with INS,while the punch will be captured by INS.Then the data from INS and other devices will be time aligned.Experiments were conducted to evaluate the feasibility and the synchronization accuracy of this solution.Compared to the traditional synchronization solutions,the proposed solution is easier to operate,requires much less workload of development,and has much more generality for different applications.It can be used in quick evaluations of sensors and systems that do not require high synchronization accuracy,and test the data logging continuity,reliability and clock stability of INS.
INS;time synchronization;GNSS receiver;pulse signal;multi-sensors;data fusion
张 辉(1989-)武汉大学卫星导航定位技术研究中心,导航制导与控制专业硕士研究生。研究方向:组合导航与信息融合,zhanghuiagain@gmail.com;

牛小骥(1973-),男,武汉大学卫星导航定位技术研究中心教授。清华大学博士毕业,加拿大卡尔加里大学(University of Calgary)博士后。目前在武汉大学卫星导航定位技术研究中心从事惯性导航(INS)和组合导航(GNSS/INS)方面的研究。研究方向为惯性测量和GNSS/INS组合导航;研究兴趣为GNSS/INS超紧组合,微机械(MEMS)惯性测量,个人导航,xjniu@whu.edu.cn。
项目来源:国家863计划项目(2012AA12A206);中央高校基本科研业务费专项资金项目(学科交叉类)(2042014kf0258)
2014-08-18 修改日期:2014-11-06
C:6330;7630;7230K
10.3969/j.issn.1004-1699.2015.01.003
V249.3
A
1004-1699(2015)01-0013-06
