姿态运动模拟系统实习平台的应用
2015-05-08王行顺杨旭强
霍 炬, 王行顺, 杨旭强, 李 伟, 齐 超
(1. 哈尔滨工业大学 电气工程系, 黑龙江 哈尔滨 150001;2. 哈尔滨工业大学 控制与仿真中心, 黑龙江 哈尔滨 150080)
计算机技术应用
姿态运动模拟系统实习平台的应用
霍 炬1, 王行顺2, 杨旭强1, 李 伟2, 齐 超1
(1. 哈尔滨工业大学 电气工程系, 黑龙江 哈尔滨 150001;2. 哈尔滨工业大学 控制与仿真中心, 黑龙江 哈尔滨 150080)
为了给大四学生提供更多的实习机会,结合实际科研项目,搭建了一套适合学生校内实习的姿态运动模拟实习平台。介绍了姿态运动模拟实习平台的总体结构和交流伺服系统的控制方案,其中包括硬件系统和控制软件。该实习平台人机界面友好、交互方便,具有完善的保护机制,使平台能够安全运行。姿态运动模拟实习平台能够帮助学生提高动手能力,增长工程实践经验,加深对相关课程的理解,在教学和科研中取得了良好的效果。
姿态运动; 伺服系统; 保护机制; 实习平台
为了提高大四学生的实践动手能力,提高他们的综合素质,结合实验室的科研现状,笔者搭建了姿态运动模拟系统实习平台。作为半实物仿真的一个重要应用,姿态运动模拟系统在国防领域和日常生活方面有着广泛的应用,如制导系统、医疗器械、测试样机等[1]。本文主要介绍了姿态运动模拟系统的总体结构、工作原理、软硬件组成和结果分析。
1 姿态运动模拟系统的总体结构
姿态运动模拟系统是一套复杂的机电耦合设备,具有高精度的机械传动、稳定双闭环结构、对机械间隙进行补偿等特性,能够反复进行实验。
图1为姿态运动模拟系统的总体结构图。系统主要包括上位机伺服系统和姿态运动台体。上位机是一

图1 姿态运动模拟系统总体结构
台高性能工控机,通过PCI总线与运动控制卡相连[2],用以实现人机交互和承载系统控制算法,并进行运动控制和逻辑控制。伺服系统由转接板、滤波器、扼流圈、伺服驱动器等部件组成,统一安装在标准工业机柜中。伺服系统是执行机构,并且具有系统各个部件之间的通信功能。姿态运动台体有3个自由度,由3套驱动器和电机使其进行俯仰、偏航和滚转。在控制程序中,添加了软件限位,以免发生“飞车”现象[3],对设备起到了保护作用。由于学生参加了系统的总体结构设计,也充分了解硬件和软件保护的重要性。
2 姿态运动模拟系统的工作原理
姿态运动模拟系统采用工控机配合运动控制卡组成二级主从式控制结构,通过运动控制卡控制交流伺服驱动器,进而实现对交流伺服电机的控制[4]。此运动控制卡具有很好的硬件保护设计,利用该功能可以避免系统在调试和运行过程中出现“飞车”现象,对设备起到了保护作用。
运动控制卡中含有以DSP为核心的运动控制模块,在控制单元内通过并行传输数据和指令,以提高数据处理速度和伺服系统的控制性能[5],通过PCI总线与PC机内的CPU进行通信并接收PC机的控制指令,再通过内部电路进行逻辑和数字运算,为动力和执行装置提供控制信号并实现运动装置准确运动[6]。
从设备的灵活性和操作的直观性考虑,姿态运动模拟系统采用“PC+运动控制卡”的全数字控制结构,通过在上位机应用软件中设计闭环控制器和高精度定时器[7],并与运动控制卡上的PID控制器相结合,构造出一个性能比较完善的、具有双层控制结构的伺服控制系统(见图2)。该系统可帮助学生直观地学习数控系统的组成,使他们能深刻理解闭环系统。

图2 姿态运动模拟系统框图
3 系统平台的硬件设计
姿态运动模拟系统采用“PC+运动控制卡+直接驱动电机及驱动器”的控制结构。GALIL运动控制卡作为连接工控机与伺服驱动器的部件。运动控制卡通过PCI总线与工控机通信,接收工控机的数字控制指令,通过转接板与伺服驱动器连接,发送模拟速度指令并接收位置反馈[8]。本系统采用的是GALIL1842运动控制卡,该控制卡可以同时控制4个轴的运动,能够完成JOG、PTP定位等多种运动方式。系统还提供了丰富的通用I/O接口,为正、负向限位、急停、原点开关提供光电隔离输入接口[9]。
伺服驱动器及电机作为执行机构,接收运动控制卡发出的控制指令,直接驱动装置的俯仰、偏航和滚转;内置码盘反馈当前电机旋转信息。本系统采用的是恒河DM系列直接驱动电机及与电机相匹配的智能型驱动器。该类电机作为外转子型直接驱动伺服电机,具有高速、高精度、高转矩的特点。驱动器内部实现了整个系统的速度环和电流环,保证了系统的响应速度[10]。
在PC端设计位置控制器,利用计算机的高精度定时,实现对给定位置的精确跟踪。由于机械间隙的存在,电机的旋转角度并不是台体的旋转角度,即编码器位置反馈不能直接作为当前位置,需要进行机械误差测量及补偿[11]。
4 系统平台软件设计
4.1 主要功能和流程
图3是软件控制总体流程图,软件的设计结合了硬件特点,系统主要有以下功能:
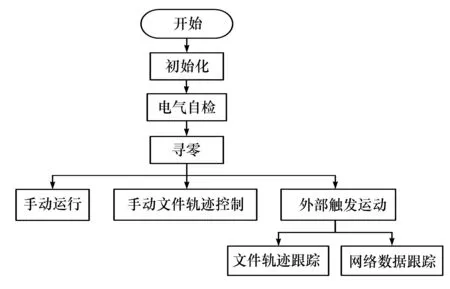
图3 控制总体流程图
(1) 初始化:建立上位机与运动控制卡的连接;
(2) 电气自检:检验上位机与运动控制卡、运动控制卡与驱动器是否连接;
(3) 寻零:根据标志脉冲使台体定位到机械零位;
(4) 手动运行:根据输入数据使台体以设定速度到达设定的位置;
(5) 外触发运动:将输入作为触发信号,在触发模式下可进行规定的曲线运动或者网络数据跟踪。
Windows操作系统具有人机交互方便的优点,本姿态运动模拟系统是在Windows下利用VC++6.0开发的,其主要功能模块有操作界面模块、保护模块和运动控制模块。
4.2 操作界面模块
姿态运动模拟系统的操作界面是基于VC++6.0编写的。界面上的按钮和输入框供实习人员与系统交互,便于进行寻零、输入轨迹、手动运行和外触发等操作。为了避免实习人员的错误操作而造成严重后果,界面上的按钮根据操作流程采用递进式开启。
4.3 保护模块
一套完整的系统,一定要有完善的保护操作人员和设备安全的措施。
在姿态运动模拟系统中设置了机械台体的最大运动速度、最大加速度和限位,防止台体发生“飞车”,能很好地保护设备。
当电气系统上电、系统软件开启后,点击初始化的按钮,系统会建立上位机与运动控制卡的正常通信并完成控制系统软件包含的相关参数与功能的设置。
初始化完成后进行电气连接的自检。这个过程是通过试运行一小段距离,在程序中判断系统的电气连接是否正确,保证之后的操作和运行正常。
4.4 运动控制模块
运动控制模块主要实现系统的寻零、手动运行和外触发控制。
寻零是根据标志脉冲使台体定位到机械零位,为之后的运动控制找一个基准;手动运行是根据输入数据,使装置以设定的速度到达设定的位置,方便之后进行定位和测试;外触发运动控制是将输入作为触发信号,在触发模式下进行规定的曲线运动或者网络数据跟踪,联合其他系统做同步测试。
5 机械误差测量补偿的实现及控制器的仿真
5.1 机械误差测量补偿的实现
工控机位置指令是以脉冲的形式发送给运动控制卡,误差补偿的目的是找出位置反馈脉冲与台体旋转角度的对应关系,消除机械间隙的影响[12]。若不存在机械间隙的话,转换关系由编码器的分辨率决定。在本系统中,方位运动方向电机编码器的分辨率为1 024 000 p/rev。由于机械间隙的存在,通过编码器反馈可以得到电机的旋转角度,但是该角度并不等于台体的旋转角度,因此,首先需测量出实际旋转的角度。为此,采用平行光管与24面棱镜来测量偏差。
平行光管的分划板置于物镜的焦平面上,所以由分划板发出的光线便为平行光。分划板根据平行光管的用途可以使用不同的图案。本文使用的是刻有十字叉形的分划板,因此能通过平行光管在物镜焦平面上观察到标准的十字叉形。
24面棱镜体安装于台体旋转轴上,棱镜每隔15°便有一个反射面。当平行光照射棱镜表面时会反射回去;当平行光管调整好后,便能在分划板上看到反射的十字叉形。若24面体旋转了15°,十字叉的刻度并不会改变,即十字叉仍在原来的位置。若没有,则会有相应角度的偏移。
测量时,先使方位轴处于机械零位,将24面棱镜安装于台体旋转轴,调整平行光管,直至能看到反射的十字叉,记录该时刻的平行光管刻度。旋转15°(确保此时看到的十字叉位置与初始时刻相同),记录该时刻电机反馈位置,便得到了旋转15°对应的电机反馈位置。
测量结束后,对相应位置的脉冲量进行补偿,补偿结果如图4所示。
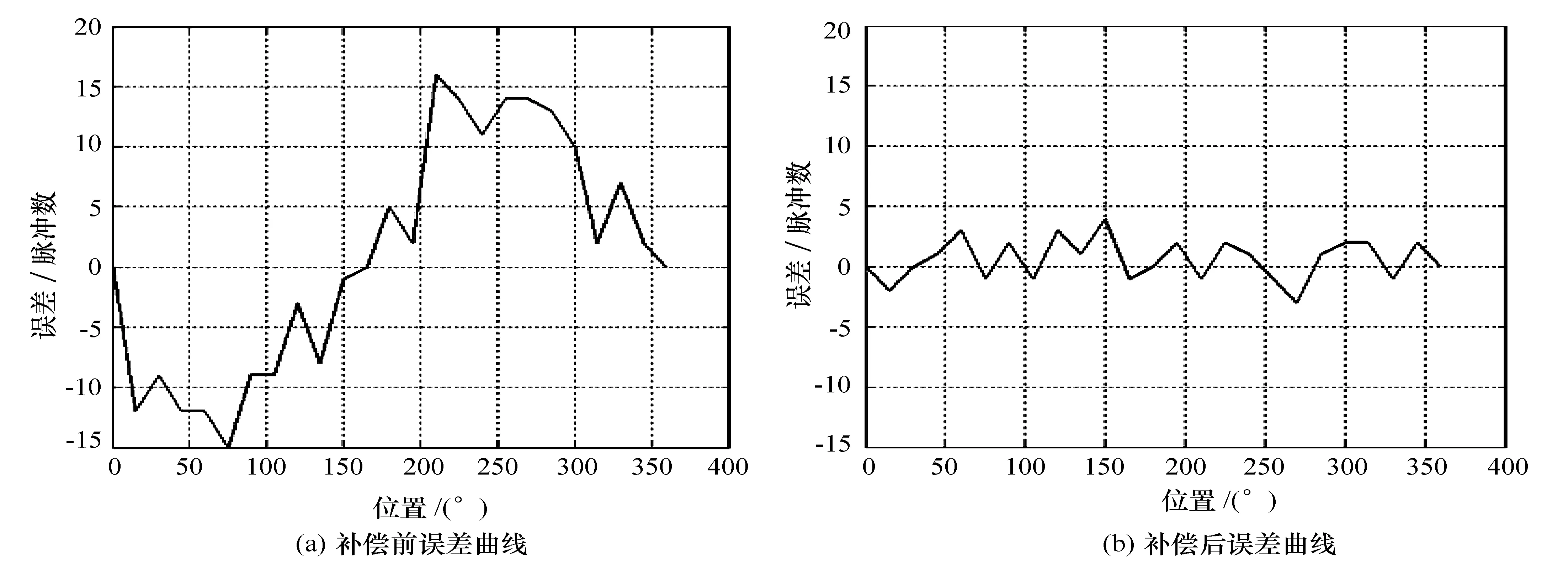
图4 机械误差补偿结果
可以看出:补偿前,利用平行光管测试实际位置与编码器反馈位置偏差较大,超过15个脉冲;补偿后,误差在5个脉冲以内,对应角度约为5″。
在进行机械补偿的过程中,学生能够学习使用平行光管,掌握机械补偿的原理和处理误差的方法。
5.2 位置控制器仿真及结果分析
姿态运动模拟系统中的被控对象是交流伺服电机及其驱动器。由于系统组成结构复杂,精确的数学模型较难获取。为此,采用理想的一阶简化模型21/(0.005s+1)作为传递函数,此时系统被控对象的等效模型为
利用Simulink搭建仿真图,并分别以阶跃信号和正弦信号对控制器进行了测试。
阶跃信号作为典型的测试信号,将该信号分别作用于普通PID+前馈控制器以及利用模糊控制对PID参数及前馈系数整定的控制器,控制效果如图5所示。在普通PID+前馈控制中,阶跃响应曲线超调5.2%,上升时间0.025s,调整时间0.048s;而参数整定控制后,超调1.5% ,上升时间0.026s,调整时间0.038s。从结果可知,经模糊整定后的PID+前馈控制具有较好的控制性能,能减少系统超调及调整时间。
正弦信号具有时变的速度、加速度信息,可以比较好地测试系统的动态性能。从图6中可以看出,加入模糊参数自整定后,动态跟踪性能优于普通PID+前馈,滞后时间明显减少,从而跟踪误差相对也较小,误差曲线如图7所示。从图7中可以看出,参数整定后的误差约为0.025°,而传统PID+前馈的跟踪误差约为0.11°。
在这个过程中,学生较容易理解控制算法在控制过程中的作用。
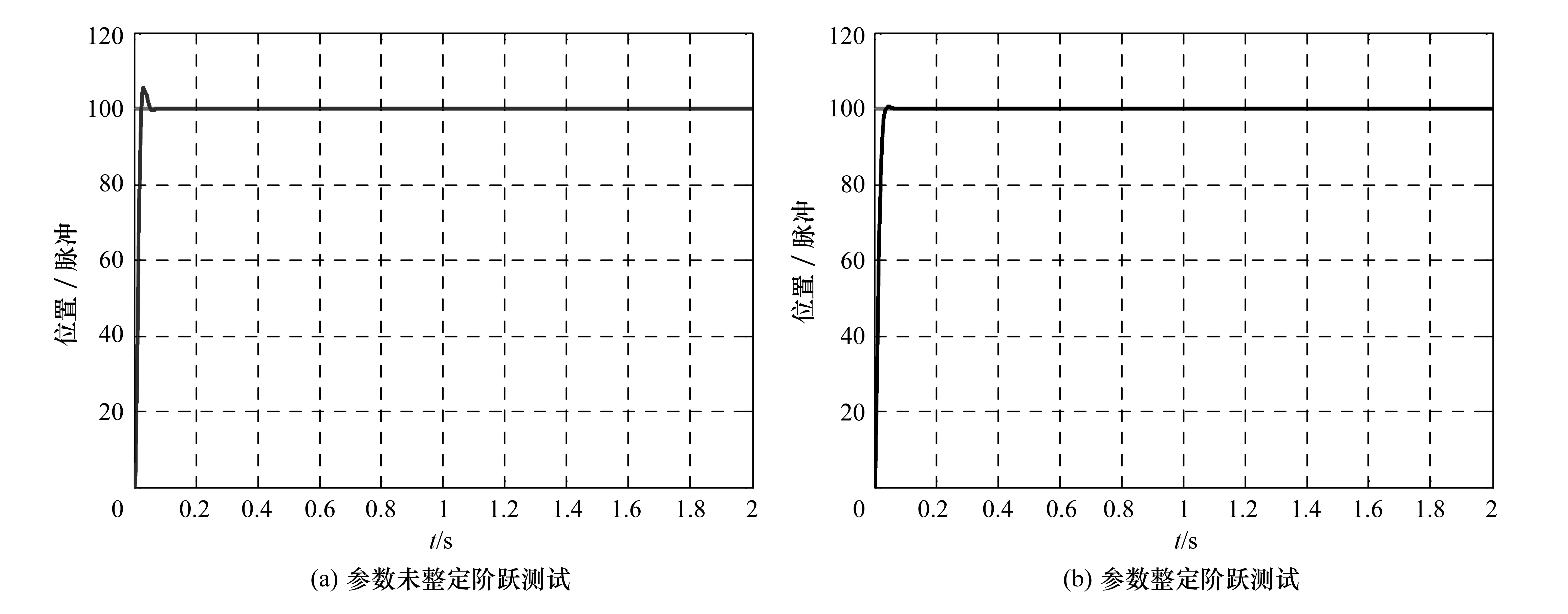
图5 阶跃测试曲线
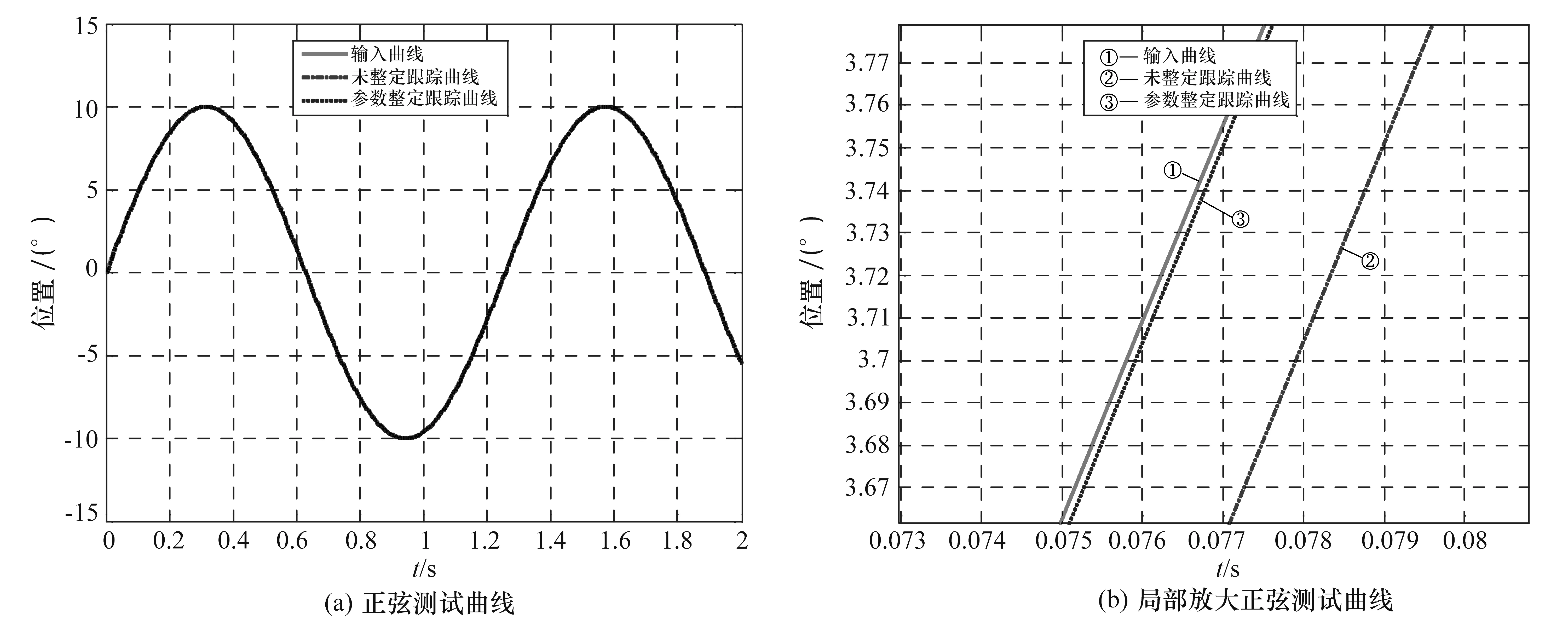
图6 正弦测试曲线
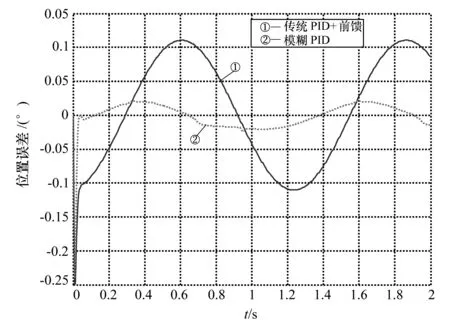
图7 正弦响应误差曲线
5.3 毕业实习过程中系统平台的应用
在进行姿态运动模拟实习时,学生可以改变系统的PID参数、比较运行结果、选择最优的参数,并通过不断的补偿达到理想的结果。在应用软件界面中,可以改变手动的运动位置和速度,读入轨迹运行数据,并实时显示运行轨迹。
6 结束语
姿态运动模拟系统实习平台对机械台体的控制采用了安全、可靠性较高的“PC+运动控制卡”的控制结构,可以让学生亲身实践调试设备的过程,提升了学生解决工程实际问题的能力。该平台的设计与应用涉及到多门相关课程的知识,包括自动控制元件、数字电路、模拟电路、计算机控制技术等知识,在教学和科研中取得了良好的效果。
References)
[1] 刘云鹤.多目标运动模拟系统及其空间位置高精度定位方法研究[D].哈尔滨:哈尔滨工业大学,2011:5-25.
[2] 徐剑.目标跟踪系统的设计与研究[D].西安:西北工业大学,2005.
[3] 姬伟.陀螺稳定光电跟踪平台伺服控制系统研究[D].南京:东南大学,2006:87-90.
[4] 史成城,谢丽蓉,张丹.运动控制系统实验软件开发平台[J].实验技术与管理,2013,30(1):119-121.
[5] 李世勇.智能控制[M].哈尔滨:哈尔滨工业大学出版社,2011:19-25.
[6] 郭敏.模糊自适应PID控制在高炉TRT系统中的仿真研究[J].电子设计工程,2012(14):21-24.
[7] 杨智,朱海峰,黄以华.PID控制器设计与参数整定方法综述[J].化工自动化及仪表,2005,32(5):1-7.
[8] 李宁.运动控制系统实验设备的研制[J].实验技术与管理,2005,22(6):50-55.
[9] 王磊,王守印,周虎,等.平行光管的基本原理及使用方法[J].仪器仪表学报,2006,27(6):980-982.
[10] 叶伟.数控机床位置控制系统研究[D].西安:西安交通大学,2005.
[11] 蔡萌.机动目标跟踪方法研究[D].哈尔滨:哈尔滨工业大学,2010:9-10.
[12] 何俊,夏斌.基于数字伺服控制原理实验系统[J].实验技术与管理,2014,31(9):91-94.
Application of internship platform for attitude motion simulation system
Huo Ju1, Wang Xingshun2, Yang Xuqiang1, Li Wei2, Qi Chao1
(1. Electrical Engineering Department.Harbin Institute of Technology, Harbin 150001, China; 2. Control and Simulation Center,Harbin Institute of Technology, Harbin 150080, China)
In order to give seniors more internship opportunities, the attitude motion simulation system that is suitable for seniors on campus is set up,combining the actual research project.This paper introduces the general structure of the attitude motion simulation system and designs the control scheme of the servo system of the internship platform.Including the composition of hardware system and control software,it realizes the function of friendly man-machine interface and convenient interaction.In addition,the internship platform contains a perfect protection mechanism to make the system safe.At the same time,it also improves the students’ practical ability,increases the experience of engineering practice,and deepens the students understanding of related courses.As a result, the good effect is achieved in teaching and scientific research.
attitude motion; servo system; protection mechanism; internship platform
2014- 11- 24
黑龙江省高等学校教改工程项目(JG2014010725)
霍炬(1977—),男,河北唐山,博士,教授,电气学院院长助理,主要从事电工电子方面的教学与教学管理工作.
E-mail:torch@hit.edu.cn
TP273;G484
A
1002-4956(2015)7- 0127- 04
