滞回非线性模型研究现状
2015-05-07程相文洪伟
程相文, 洪伟
(河北联合大学 机械工程学院,河北 唐山 063009)
0 引言
滞回非线性是很常见的系统非线性特性,常用于描述位移或应力和应变力、材料的力和速度之间的滞后关系。在振动利用工程中具有广泛的实际应用背景[1]。
非线性系统的滞回模型种类很多,大致可以分为分段直线型滞回模型和曲线型滞回模型两大类,下面对这两种类型中常用的模型作简单介绍。

图1 干摩擦理想模型
1 分段直线滞回模型
1.1 干摩擦理想模型
Den Hartog[2-3]在1931年按能量耗散相等原则用等效黏性阻尼力替代干摩擦力,发展成了等效线性化方法,同时提出了最简单的滞回非线性的模型—干摩擦理想模型,其表达式为

干摩擦力与速度、位移的关系可用图1表示。干摩擦力方向与速度方向相反,为一个常数,图中的矩形面积就是一个振动周期内的能量损耗。C.W.Stammers对半主动干摩擦系统的振动控制进行了研究,干摩擦力在质量控制中的应用取代了只能作用于相反方向的弹性力。干摩擦阻尼器可以用来模拟黏性阻尼器[4]。王华中等[5]以理想的干摩擦模型为基础,对摩擦力的分布情况进行了分析,得出了摩擦力方向判断及大小计算的方法。
1.2 双线性模型
Iwan WD于1961年在干摩擦模型的基础上,提出了双线性模型[6],其数学表达式为

滞后曲线可分解弹性和迟滞两部分,如图2所示。这个模型可以描述系统干摩擦时的情况,能够对滞回回线进行较好的近似。具有简单的表现形式、少量的物理参数识别、明确的物理意义等特点。

图2 双线性模型
胡海岩[7]提出的记忆力模型,是通过实验对双线性模型进行了改进,此模型的提出,为非线性隔振器的研究提供了方便。R.Y.Tan[8]提出了一个验证算法来研究铅橡胶基座高速公路桥隔振系统的动态特性。用线性模型来表示底座构造,用双线性滞回模型表示支承体系,并且通过一个数值实例说明了验证过程和算法的可行性。白鸿柏等运用Floquet理论解决了滞回非线性系统周期解的稳定性分析问题[9-10]。

图3 Caughy双线性滞回模型曲线
1.3 Caughy双线性模型
Caughy[11]于 1960年提出了最早的最简单的对称的双线性滞回模型,其中系统的力—位移曲线由线段组成,如图3所示。
2个线性弹簧及库仑阻尼组合成了它的物理系统,此模型可用来研究振动压实过程中的不对称滞回模型。
1.4 Neilsen退化双线型模型
Neilsen提出的退化双线模型常用于钢材,如图4所示。图中的数字表示不同的作用力下的路线变化。

图4 Neilsen退化双线型
其中卸载曲线的斜率Ky表达式为

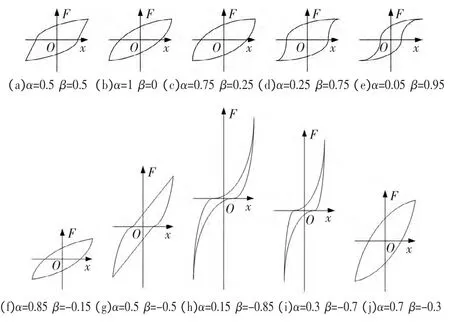
式中:xy为正负加载的屈服变形的绝对值;K为在变形x 图5 Clough退化双线型曲线 这个滞回曲线模型的提出,主要是为了研究钢筋混凝土构件,如图5所示。图5中数字与图4中的具有相同意义,退化刚度按照最近一次反向变形的最远点来计算,例如路线7的斜率由J、C两点坐标计算如下: Davidenkov[12]于 1939 年提出了双参数模型,其数学表达式为 式中:K为滞后环的线性刚度;x为相对位移;n和η为滞后环系数,由实验确定。滞后曲线如图6所示。杨绍普[13]利用此模型提出了转迁极限点的概念;金栋平 等[14]在 Davidenkov模型的基础上,描述了材料的滞回非线性特性。通过多尺度法和奇点理论得到了此类系统的新的动态特性;陈恩利等[15]对两系非线性悬挂车辆的运行稳定性与分岔进行了研究,建立了以Davidenkov模型为基础的动微分方程,为车辆设计和参数选取提供了依据;项伟等[16]结合对土体动力学特性广泛适用性的基于等效黏弹性理论的修正Davidenkov模型,提出用于求取最大动剪切模量并得到本构方程中所需系数,对该模型中的3个参量多元回归和对最大动剪切模量自适应逼近迭代的反分析算法。荣棉水等[17-18]利用此模型对渤海海域软表层土非线性动力本构关系进行了一系列研究。 图6 Davidenkov模型 由 Bouc[11]于 1967 年提出,Wen 等[19]于 1976 年进一步发展得到了被称作一阶非线性微分方程模型的Bouc-Wen模型,如图7,其表达式为 图7Bouc-Wen模型 式中:Z 为滞后恢复力;x为相对位移;x˙为相对速度;α、β、γ、n为参数。 通过对具有滞回非线性恢复力的系统进行研究,Bouc[20]于1967年介绍了一种沿用至今的简单的光滑滞回模型,它是通过微分方程来进行控制的。1976年Wen[11,21]改进了Bouc-Wen模型,其表达式为 式(8)可以表示一般曲线滞回非线性模型。α、β、γ决定滞回曲线的大小和形状,常数n决定曲线的光滑程度。调节这些系数,取α=1.0,β=0和γ=1.0,所得到的滞回恢复力系统具有不同的特性,如图8所示。其中:图8(a)~(e)中 α<0,β≥0;图 8(f)~(j)中 α>0,β<0。 图8 Brouc-Wen模型在不同参数下的光滑滞回曲线模型 由图8可知Brouc-Wen模型的光滑滞回曲线特点: 1)当α>0,β≥0时,系统的恢复力与位移绝对值成反比,即具有软特性;当α>0,β<0时,系统的恢复力随着位移绝对值成正比,即具有硬特性。 2)系统滞回恢复力曲线包含的面积、曲线形状和系统在振动过程中消耗的能量与α/β比值成正比。 目前,该模型主要用于对土木结构、机械系统的地震随机响应分析和磁流变阻尼力分析。严天宏等[22]在Bouc-Wen模型的基础上,提出了一个基于轨道结构主动控制的用于非线性滞回隔振系统的改进瞬时主动控制算法,此算法使控制系统的评估更简单明了,最后运用数字仿真证明了算法的可行性。鲁丽雪等[23]讨论了动态Bouc-Wen模型的应用条件和滞回环上模型参数的影响,得到了Bouc-Wen动态模型的增益耗散函数表达式,分析了筑坝土石的能量耗散原理,对进一步认识土体动应力-应变特性有一定意义。Spencer[24]在Bouc-Wen模型的基础上提出了一个新的能够有效地描述典型磁流变减振器特性的模型,此模型在很大范围的操作条件下都能保证精确度,同时适用于控制设计和分析;关新春等[25]分析了磁流变耗能器阻尼力和它的一般模型的特性,建立了阻尼力的改进Bouc-Wen模型并确定了模型参数,为磁流变耗能器在结构控制领域的应用提供了基础;王贞艳等[26]提出了一个针对压电致动器的基于Bouc-Wen滞回非线性特性的Hammerstein率相关模型,建立了一个基于Bouc-Wen模型的滞回补偿器,并且将其与被控对象串联起来,使系统线性化。 1987 年 Badrakhan[27-28]提出了迹法模型,其滞后恢复力的表达式为 模型示意图如图9所示。迹法模型具有平均和等效原则,形式简单,振幅和频率的改变会导致其恢复力的变化,易于根据实验数据进行拟合。根据不同的阶次和参数,可得到不同的形状,有较为广泛的使用范围。 图9 迹法模型 L.M.Tinker[29]利用迹法模型对建立在螺旋光电隔振器上的钢丝绳隔振系统的动态特性进行了研究,提出了一个包含非线性刚度、加速度阻尼和可变库仑摩擦阻尼的半经验方程,并对实验数据进行比较。潘东等[30]在迹法模型的基础上提出了一个用新的参数来描述线性阻尼和干摩擦混合阻尼特性的模型,并通过参数辨识来证明此模型能够有效地描述混合型阻尼滞回非线性特性。王轲等[31]通过实验在利用迹法模型建模过程中首先引入了最大位移变形,然后根据恢复力和位移变形之间先后达到最大位移变形的不同的本构关系,得到滑移极限等模型参数,并证明整个识别过程是可行的。龚宪生[32-33]利用迹法模型对以钢丝绳为基本元件的联轴器和增强泡沫塑料隔振器的建模和参数识别进行研究,并提出了多种以试验数据为基础的数学模型。赵荣国[34]基于迹法模型提出了一个新的非线性隔振系统动力学模型,并且推导出了它的理论表达式。此模型由非线性刚度和非线性滞回阻尼原理构成,将非线性滞回阻尼力表示为位移的函数,这使数字计算更加简便,减少了测量工作量。 另外,杨绍普等[35]提出了新的迹法模型,他用位移和速度的立方对系统的滞回非线性特性进行模拟,其表达式为 式中:x 为相对位移;x˙为相对速度;k1、k2、c1、c2为参数,由实验数据拟合。 其滞后回线如图10所示。杨绍普[35]运用此模型研究了一个基于均值法的多频激励滞回非线性系统组合共振,提出了组合共振系统参数的影响。李韶华[36-37]利用这种模型研究了具有滞后非线性的汽车悬架在发生路面多频正弦激励下的受迫振动时的混沌运动,得到从准周期运动到混沌运动的轨迹。周艳国等[38]针对金属橡胶动力学特性提出了三个非线性模型,其中精确推导出了两种形式的迹法模型和记忆力模型,为金属橡胶隔振器的建模和参数识别提供了一种实际有效的方法。 图10 位移和速度3次方模型 由上述可见,当系统存在滞回非线性特性时,它的力与位移形成的曲线或者应力与应变形成的曲线会产生滞后回线。滞后回线是由表示弹性力的滞后回线基架线(不随频率变化,无能量损耗)和表示阻尼力的纯滞后环组成,滞后环可以用不同种类的阻尼来表示,它的面积表示能量损耗。正阻尼时滞后回线走向为顺时针,相反,负阻尼时滞后回线走向为逆时针。在分段直线滞回模型中,当滞回曲线的决定因素是第一次正负向加载的力-形变曲线时,第一次正负向加载的开裂点(三线型)和屈服点的载荷和位移值,或者3个(二线型是2个)图中线段的斜率及其相应转折点的载荷和位移值必须已知;而Bouc-Wen模型等曲线型滞回模型则具有包括非线性阻尼和非线性刚度在内的较强的适应性,可用来近似描述各种光滑滞回曲线。 [1] 闻邦椿,李以农,张义民,等.振动利用工程[M].北京:科学出版社,2005. [2] Den Hortog J F.Forced Vibrations with Combined Coulomb and Viscous Friction[J].Transaction of the ASME,1931(9):107-115. [3] Den Hartog J F.Mechanical Vibrations.New York:Mcgrraw Hill Nook Company,Inc.,4Th ed.,1956. [4] Stammers C W,Sireteanu T.Vibration Control of Machines By Use of Semi-Active Dry Friction Damping[J].Journal of Sound and Vibration,1998,209(4):671-684. [5] 王华中,张伶,李红英.静摩擦力分布情况的分析[J].江西蓝天学院学报,2009,4(2):40-43. [6] Iwan W D.The dynamics response of bilinear hysteretic System[M].California:California Institute of Technology,1961. [7] 胡海岩,李岳锋.具有记忆特性的非线性减振器参数识别[J].振动工程学报,1989,2(2):17-27. [8] Tan R Y,Huang M C.System identification of a bridge with lead-rubber bearings[J].Computers and Structure,2000,74:267-280. [9] 白鸿柏,黄协清.三次非线性粘性阻尼双线性滞迟振动系统IHB分析方法[J].西安交通大学学报,1998,32(10):35-38. [10] 白鸿柏,郑坚,张培林,等.粘性阻尼双线性滞迟振子简谐激励响应的Krylov-Bogoliubov计算方法[J].机械工程学报,2000,36(10):27-29. [11] Wen T K.Method for random vibration of hysteretic systems[J].ACSE Journal of the Engineering Mechanics Division,1976,102(2). [12] Davidenkov N N.Hysteretic Property of the Ferrous Metal[J].Tech.Phys.,1939,8:483-489. [13] Yang Shaopu,Chen Yushu.The Bifurcations and Singularities of the Parameterical Vibration in a system with Davidenkov’s hysteretic nonlinearity[J].Mechanics Rearch Communication,1992,19(4):267-271 [14] 金栋平,陈予恕.滞回非线性系统的分岔和奇异性[J].天津大学学报,1997,30(3):299-304. [15] 陈恩利,杨绍普.两系非线性悬挂车辆的运行稳定性与分叉[J].应用力学学报,1995,12(3):92-95. [16] 项伟,江洎洧,Rohn J.基于等效黏弹性模型获取土体最大动剪模量的计算方法[J].岩土力学与工程学报,2013,32(增刊 2):4082-4090. [17] 荣棉水,李红光,李小军,等.Davidenkov模型对海域软土的适用性研究[J].岩土工程学报,2013,35(增刊2):596-600. [18] 荣棉水,李小军.渤海海域软表层土的动力特性[J].哈尔滨工程大学学报,2014,35(7):833-838. [19] Bouc R.Forced vibration of mechanical system with hysteresis[c]//ProceedingsoftheFourth Conferenceon Nonlinear Oscillations,Prague,Czechoslovakia,1967. [20] 闻邦椿,李以农,韩清凯.非线性振动理论中解析方法及工程应用[M].沈阳:东北大学出版社,2001. [21] Cveticanin L.Conservation laws in systems with variable mass[J].Transactions of the ASME,1993,60:556-550. [22] 严天宏,王学孝,段登平,等.含弹塑性滞迟非线性结构系统的实时最优控制研究[J].控制理论与应用,2000,17(4):619-623. [23] 鲁丽雪,迟世春.Bouc-Wen土体动力模型的阈值应变研究[J].岩土力学,2014(5):1311-1316. [24] Spencer B F,Dyke S J,Sain M K.Phenomenological model magnetorheological damps [J]. Journal of Engineering Mechanics,1997,123(3):230-238. [25] 关新春,欧进萍.磁流变耗能器的阻尼力模型及其参数确定[J].振动与冲击,2001,20(1):5-8. [26] 王贞艳,张臻,周克敏,等.压电作动器的动态迟滞建模与H_∞ 鲁棒控制[J].控制理论与应用,2014,31(1):35-41. [27] Badrakhan F.Rational study of hysteretic systems under stationary random excitation[J].Int.J.Nonlinear Mechanics,1987,22(4):312-315. [28] Badrakhan F.Dynamic Analysis of Yielding and Hysteretic System by Polynomial Approximation[J].Journal of Sound and Vibration,1988,125(1):23-42. [29] Tinker L M,Cutchins M A.Damping Phenomena in a wire Rope Vibration Isolation System [J].Journal of sound and Vibration,1992,157(1):7-18. [30] 潘东,赵玫,静波.钢丝绳弹性组合元件中滞后力的数学建模[J].上海交通大学学报,1996,30(8):104-107. [31] 王轲,李伟,朱德懋.非线性迟滞阻尼减振器动力学模型参数识别[J].华东交通大学学报,1999,16(4):1-5. [32] 龚宪生,唐一科.一类迟滞非线性振动系统建模新方法[J].机械工程学报,1999,35(4):11-14. [33] 龚宪生,唐一科,景军平.增强泡沫塑料隔振器动态性能的实验研究[J].复合材料学报,2003,20(5):135-141. [34] 赵荣国,徐友钜,陈忠富.一个新的非线性迟滞隔振系统动力学模型[J].机械工程学报,2004,40(2):185-188. [35] 杨绍普,袁向荣,陈恩利.多频激励滞回非线性系统的组合共振分岔与奇异性[J].非线性动力学学报,1998,5(3):223-229. [36] 李韶华,杨绍普.具有滞回非线性的汽车悬架中的混沌[J].振动、测试与诊断,2003,23(2):86-89. [37] Li Shaohua,Yang Shaopu,Guo Wenwu.Investigation on chaotic motion in hysteretic nonlinear suspension system with multifrequency excitations[J].Mechanics Research Communications,2004,31:229-236. [38] 周艳国,屈文忠.金属橡胶非线性动力学特性建模方法研究[J].噪声与振动控制,2013(1):31-36.
2.5 Clough退化双线型模型

2 曲线滞回模型
2.1 Davidenkov模型


2.2 Bouc-Wen模型




2.3 迹法模型



3 结论
