基于单片机控制的图书馆机器人的开发
2015-05-07王滨韩丹李思远夏建邦关心同殷彤白家振王立新郑元松
王滨, 韩丹, 李思远, 夏建邦, 关心同, 殷彤, 白家振, 王立新, 郑元松
(1.大连豪森瑞德设备制造有限公司,辽宁 大连 116036;2.大连工业大学机械工程与自动化学院,辽宁 大连 116034)
0 引言
目前,找书难、上架难、移架难等问题是图书馆管理面临的主要问题。主要的解决途径是图书馆自动存取技术。就目前的发展水平来看,图书馆自动存取技术可分为3 类[2]:1)自动化的系统被实现在单个书架中;2)图书馆整体实现自动化的立体化仓储系统;3)“移动机器人+机械手”的组合系统[3]。前两种方案,图书馆需要更换全部设备,成本很高,并且日常管理较为复杂。第三种方案制造成本低,灵活性好。
本文采用“移动机器人+机械手”的设计思路,研发了以单片机为核心的图书馆移动机器人系统,这款机器人具有成本低廉,扩展简单,具有较高的灵活性及稳定性等特点,可以在书架间灵活行走,发生故障时,能够停止行走,等待修复,而图书馆仍然能正常开放[4]。

图1 图书馆移动机器人
1 工作原理
移动机器人系统如图1所示,包括机械结构主体、运输车及控制系统,能够完成 3个方向(x、y、z)的运动:横向运动(x)由小车及实心滑轨组成,小车由伺服电机提供动力,单片机控制行进和停止,能够定位货物x轴坐标位置;纵向运动(z)由滑轨、机械臂整体、线轴部分组成,电机提供动力,单片机控制机械臂升降,能确定货物在z轴的位置;前后运动(y)部分由机械臂和气动手指组成,单片机控制电磁阀换向,实现手臂运动及手指夹紧。

图2 夹取机构
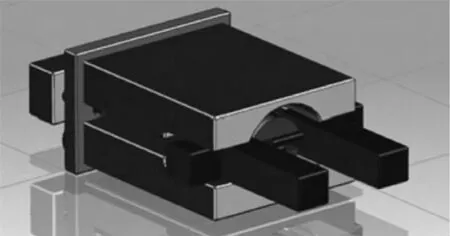
图3 气动手指
2 机械手设计
机器人的机械手具有水平方向、竖直方向、x方向3个自由度。并在末端安装了可完成抓、放动作的手爪。夹取部分由气动机械臂(如图2)和特制夹头(如图3)组成。气动机械臂是一个标准气缸件,它的行程为200 mm。连接气泵后,通过电磁阀的控制,气缸内的活塞可以做伸缩运动,从而实现了手臂的自由伸缩。气缸座用3 mm厚铝板制成,上下滑轨采用φ16空心直管,这可节约材料,同时减轻上部的重量,降低了负载。
横向运动部分由小车和滑轨组成,如图4所示。横向小车是横向运动的动力源和信号源,因为其内部装有电池这样的能源装置,还有电路板、单片机这样的控制装置,同样装有电机这样的执行元件,通过电池供电和单片机的有效控制,可以实现有规律的横向运动,最终可使整体机构可以在滑轨上随意定位和移动。横向小车通过连接两个滑块固定于横向滑轨上,这样才能实现一个自由度方向上的横向平移。滑轨采用的是铝合金实心管,强度高,表面光滑,直径为16 mm,长度为1 500 mm。采用两根导轨目的是使装置底部更加稳定,机械运动更为精确,满足了横向运动的行程与小车的稳定性。
纵向运动(图5)由电机线轴部分和滑轨组成。通过电机转动和线轴转动带动机械手臂上下平移。上下运动使用电机带动绳索升降,电机要与线轴配合,带动绳索转动,绳索连接与夹取部分的装置上。这样通过电机的转动就可以实现纵向运动了。此方案的优点是动作易于控制,同时大大降低了成本,所实现的效果也比较理想。控制机械臂上下运动电机转速为44 r/min,控制取书部分左右运动的电机转速为120 r/min.鉴于机械臂每次只需夹取一个货物,取书部分的误差较大(约为±5 mm左右),但仍能保证准确地取到货物。
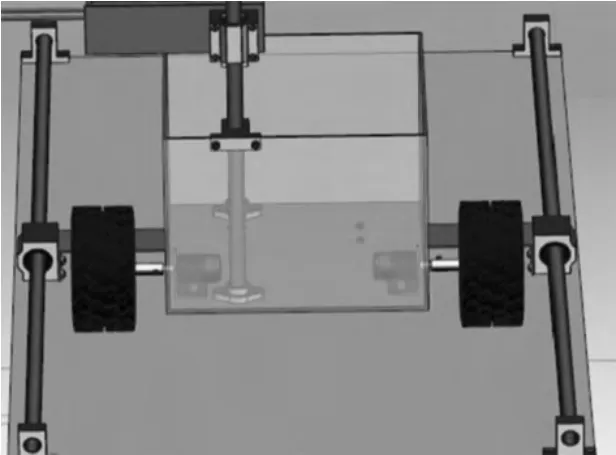
图4 横向移动机构
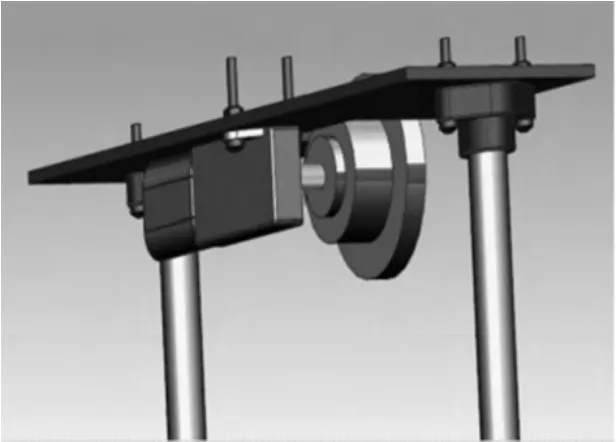
图5 纵向移动机构
3 自动导向小车
在图书馆内进行图书搬运和机械手定位的图书馆智能小车,也可以被称做图书AGV。在机器人导航系统的分析中,通常将移动机器人的工作环境分为结构化环境和非结构化环境。图书馆是一个结构化非常明显的空间。各个书架的相对位置都是固定的,并且不会改变。所以可以使用相对成熟的固定路径导向技术。
根据以上要求,本文设计了图书馆自动导向小车。车内部装有电池、单片机、光电传感器、电路板等装置。小车利用色标开关识别路径,准确地将书送到输出端。小车底板与地面成倾斜30°角,能使放入的书籍整齐排列并不易滑落。设计合理的光电反馈控制其起停。
3.1 小车结构
如图6所示,通过光电传感器与单片机之间的信号传输与转换实现对双轮差速转弯电动车的控制。由于直流电机具有转动力矩大、质量小、装配使用方便等优点,故采用空心杯直流电机。由于高速电机系统要求较高的控制精度,通过用光电传感器寻轨的方式可以实现,并且具有原理简单、价格低廉、性能稳定的特点,可集发射器和接收器于一体,能完成需要的信号检测功能。

图6 运输车
3.2 地面制导的实现
色标开关在白色地面时输出5 V高电平,在黑色制导带上输出低电平。光电开关的反应时间短,可以提高系统的控制精度。整个操作过程通过实时信息的采集和端口查询,可实时对信号检测与处理。
在设计运输系统的过程中,力求线路简洁,凭借软件的灵活性来满足系统设计的要求。以单片机为核心元件,光电检测技术和软件算法可实现电动小车在黑色轨迹上的灵活运动。运输车采用四轮驱动,四轮电机驱动采用功率放大管,通过单片机提供的控制信号进行修改对电机的速度和转向进行灵活简洁地控制,使其回到黑色轨迹上运动。在运动过程中,三个固定在轮子下的反射式传感器引导电动车沿着白色轨迹运行。当车偏离运动轨迹(超出黑线)时,反射光较弱,单片机接收到输出的高电平,系统被迫中断并调整两个电机转向,使车再次回到轨迹。车前后两侧的传感器用来检测小车运动过程中是否达到指定地点。此外用来检测平衡的传感器固定在跷跷板支架上,若红外三极管因指针遮挡住传感器中心轴而接收不到红外光,输出送给单片机则变为高电平,小车便停下来,说明平衡位置找到了。小车运行轨迹图如图7。当运输车直线行走时(图7(a)),光电全灭;当运输车拐弯时(图 7(b)),光电全亮。
4 控制系统
Arduino是一个开源的单片机电子设计平台,其作为集成开发环境的最大特点就是简单易用。Arduino控制板根据检测到的红外信号,输出具有制定控制策略的PWM信号,调节直流电机的转速和电机的旋转方向,最终实现控制小车的运动轨迹。
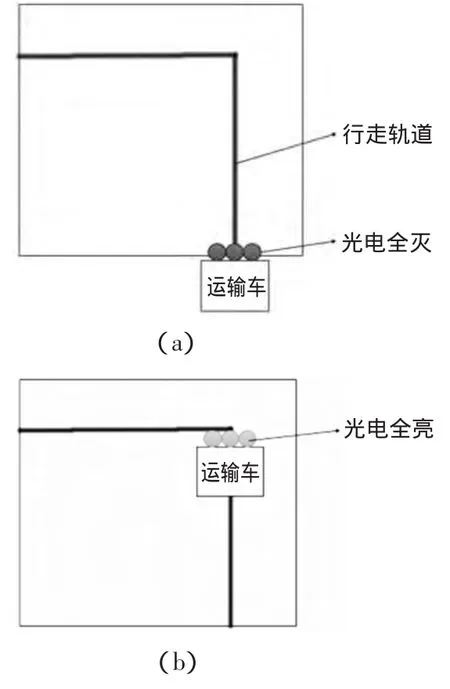
图7 智能小车运动轨迹
取货部分设计采用闭环系统控制,闭环部分采用光电编码盘,连续发光的光电管不停地通过格栅,所以光电管接收端就能接收到和格栅通过频率相同的光信号,通过光敏三极管的转化转为变化的电信号,从而测出取货小车移动的速度与距离。接线图如图8所示。

图8 编码器参考接线图
采用闭环控制[6],通过小车行进距离与给定值的偏差量进行电机前进控制,通过PID算法编程调控小车平稳运行前进指定距离。部分代码如图9所示。
5 结论
本文设计了一种基于单片机控制的自动完成图书上架工作的图书馆移动机器人系统,通过实际运行测试,表明功能均满足设计要求,并且控制系统的安全可靠,操作方便,节省了劳动力,从而大大提高了工作效率。

图9
[1] 崔建伟,宋爱国,庄皓兰,等.机器人技术在图书馆自动化系统中的应用研究[J].机器人技术与应用,2009(6):33-35.
[2] 王晶,黄斌,陈俊华.基于PLC的图书馆作业型机器人工作系统[J].机床与液压,2005(10):160-162,192.
[3] 沈红兵.黄唯.图书馆书库管理新革命——图书馆机器人管理书库的应用研究与启示[J].农业图书情报学刊 2011,23(5):97-99.
[4] 孙俊,蒋昕怡,韩杰,等.图书馆机器人行走控制系统设计[J].中国电力教育,2009(15):188-190.
[5] 周晶晶,蔡锦达,钱炜,等.自助式图书借还装置设计[J].机械制造,2010,11:37-39.
[6] 阎勤劳,张海伟,张莉,等.温室移动机器人系统闭环控制的实现[J].农业机械学报,2006(4):91-93.
[7] 李晓明,杨灿军,陈鹰,等.图书馆智能小车的导引系统设计[J].激光与红外,2000(1):56-57.
[8] 宁慧英.基于光电传感器的智能小车自动寻迹控制系统[J].仪表技术与传感器,2012(1):108-110.
[9] 纪欣然.基于Arduino开发环境的智能寻光小车设计[J].现代电子技术,2012(15):161-163.
[10] 王洪涛,王永亮,禹海阔,等.基于89S51单片机的智能运载车设计[J].滨州学院学报,2011(6):98-100.
