基于PSD的无人机瞄准精度检测方法研究
2015-05-07魏立林高艺王忱李楷
魏立林, 高艺, 王忱, 李楷
(长春理工大学机电工程学院,长春130022)
0 引言
为了改善武器精确打击的效果,瞄准检测具有重要的意义,打得准不准,首先看瞄得是否精确。在有人机瞄准的训练测试过程中,通常通过测试驾驶员把光点重叠在目标上的能力来评定驾驶员的瞄准技术水平。在技术说明上,所有瞄准要求都规定,在瞄准的过程中,驾驶员要尽量使瞄准具的中心点与目标相重合[1]。无人机作为攻击型战机使用时也是如此,自动瞄准时产生的误差导致最终攻击的误差,所以进行无人机瞄准系统精度检测的意义重大。且一般情况下攻击型无人机搭载的精确制导导弹造价昂贵,无疑增加了战争的成本,也制约了平时无人机的试验和训练。所以,无人机搭载常规武器弹药的研究具有很重要的意义,自动瞄准的精度问题便成为了关注的焦点[2]。针对无人机在战场上的大量应用,为了进一步提高其在攻击目标时的瞄准精度,改善作战效能,本文提出了一种以PSD位置传感器为检测平台的用来验证无人机瞄准是否精确的方法,并针对该方法的理论进行了必要的推导,同时建立了相应的数学模型。
1 PSD作为检测平台的可行性推导
由于PSD在理想状态下可以近似等效于RC网络。则使用光束对PSD的光敏面进行照射,假定入射光斑的直径足够小,设定宽度为2Δ,当入射光照射在光敏面某处时,该处便会产生光生电流,可以将被激发产生的光生电流看做是在该位置处通入电流源I(x,t),这个电流源的强度主要由光斑的光照强度分布、光敏面接收光照的区域和照射光束的调制情况来决定[3]。iL和iR分别表示外围电路从两极输出的电流,ZL和ZR分别表示从PSD两极为起点进行观察的等效阻抗,入射光将PSD的光敏面分为3个区域。即光斑左面的区域Ⅰ区、光斑右面的区域Ⅱ区和光斑所在的位置Ⅲ区。在Ⅲ区内选取无限小的微元Δx,规定其中的瞬态电势为φ(x,t),瞬态电流为i(x,t),由基尔霍夫定理和欧姆定律的知识可以得到,瞬态电流i(x,t)在通过阻值为RXΔx的无限小微元时所引起的压降[∂φ(x,t)/∂x]·Δx 可以用以下公式来计算:

由式(1)可以看出,若是正向电流流过将会是电势随着x的增加而逐渐减小。同理可以推算出电流的变化[∂i(x,t)/∂x]·Δx的关系表达式:
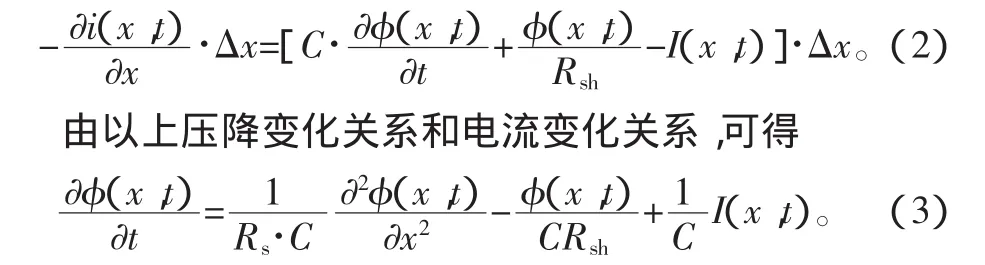

图1 一维PSD的RC传输模型

同理于一维PSD等效RC模型建立时所用的方法,在坐标为(x,y)处,取一个边长分别为Δx和Δy的矩形微元,可以建立以下的关系式:

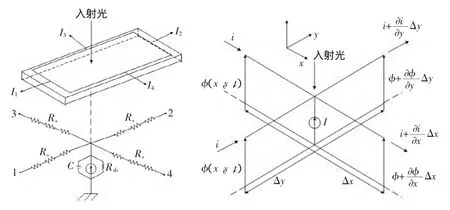
图2 入射光点作用时的二维PSD微元示意图
整合式(6)和式(7)可得到二维PSD的横向光电效应的基础二阶偏微分方程为

若照射PSD光敏面的入射光信号是正弦调制光信号,则将PSD等效为一个RC网络时,当光斑的位置发生变化,光点位置到电极的等效阻抗和容抗的大小也发生相应的变化,导致PSD的电极输出了不同相位延迟的调制信号,则可以确定相位是一种携带光斑位置信息的载体。
设置Rsh=10 MΩ,Rs=50 kΩ,C=27 pF,调制频率ω从10k至70k取值,用MATLAB软件进行模拟,并用模拟曲线来表示(如图3)。

图3 PSD两电极输出电流的相位差信息与光斑位置信息关系图
可以发现两个电极输出电流的相位差信息与光斑位置信息存在着近似的线性关系,且随着信号调制频率ω的不断增加,输出电流的相位差对于光斑位置变量坐标的曲线斜率也相应增大,可以肯定地认为是由于灵敏度的提高导致这一现象,所以在实验中想要提高位置检测的灵敏度的时候便可以通过加大信号调制频率的方法来实现[5]。且可以知道越接近PSD光敏面中心区域的位置,曲线的线性度越好,越是靠近PSD光敏面的边缘区域,越呈现出明显的非线性,主要是由于PSD的自身结构的问题,使负载阻抗对其检测精度有一定的影响。
2 实验系统的搭建
使用PSD作为检测平台来确定双光斑的位置信息需要采用PSD相位法检测,经两种频率的正弦调制信号调制后输出的双光束同时照射在PSD的光敏面上,PSD的左右电极输出的电流信号将是这些正弦信号的谐波,再使用带通滤波的方法将这两路经过不同频率调制的信号分离出来,并通过相关的鉴相方法,依据不同的相位信息而求出各光斑的位置信息的关系,进而实现了双光斑的实时监测。系统的结构图如图4所示。
PSD的输入信号为正弦光,该正弦光是由红外发光二极管在波形发生器和红外发光二极管驱动电路的同时作用下发出的,然后照射在PSD的光敏面上,PSD两端电极便输出了光生电流信号,该电流信号利用前置放大电路进行被测电流信号的放大,同时将光生电流信号转化为电压信号。但是根据实际情况而言,光敏面接收到的光信号中还有背景电流和噪声的影响,电极输出的电流信号就是这些外部信号和有用信号的叠加,需要将有用的正弦光信号提取出来。所以系统中应有带通滤波器来完成背景电流信号和噪声信号的去除。经过滤波后的信号通过过零比较器的更改,变为方波信号,同时将起初进行调制的正弦标准信号也通过过零比较器进行方波信号的转化,成为对比用的参考信号。经过异或门处理电路将两电极输出的电流信号和参考信号进行比较,方波信号的占空比反映了相位差的变化。将方波信号送入低通滤波器进行方波信号的平均值运算,得到两路直流信号。差分放大器将两路直流信号做减法运算后进行信号放大,然后将这些模拟信号经过A/D转换卡变成计算机能够处理的数字信号,进行最终的位置信号处理。
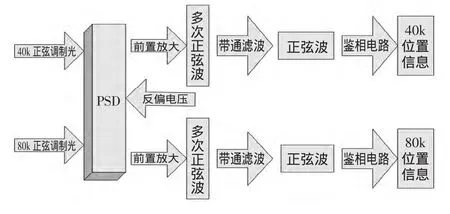
图4 基于PSD相位法的无人机瞄准精度检测系统框图
3 实验数据处理
将两个红外发光二极管同时固定于实验台架上,通过不同频率的驱动使两个红外发光二极管分别发出40kHz和80 kHz的光波,经过透镜的汇聚同时照射在S1880型PSD的光敏面上。将反向偏置电压外加在PSD的X方向的电极上,将Y方向的电极作为输出信号端口,设置搭载PSD检测装置的微位移平台进行运动,每运动5 mm进行数据记录,往返4次,进行每个节点的平均值运算,得出电极的输出电压差,并根据输出电压差值与实际位移的线性方程进行计算,从而得到了由PSD检测的两束光斑的实时位置信息。如图5~图8所示。

图5 双光斑检测中40 kHz光斑位置曲线
4 结论
使用PSD为检测平台来检测无人机的瞄准精度,电路搭建较为简单,且可以根据不同频率的入射光来变换相应的信号处理电路,从而得到光斑的位置信息,该方法简单有效,但在实验中由于PSD自身特性的限制,使得在PSD光敏面边缘检测时造成较为明显的误差,而在中心区域则基本符合实验要求,所以在检测过程中应当尽量迫使检测光斑入射在光敏面中心区域。
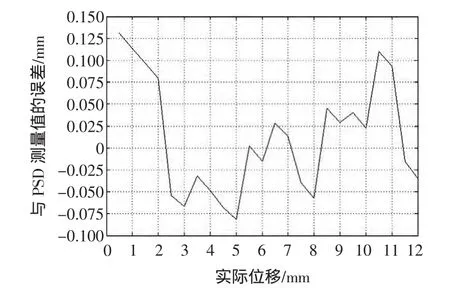
图6 双光斑检测中40 kHz光斑实际位置和测量位置误差曲线

图7 双光斑检测中80 kHz光斑位置曲线
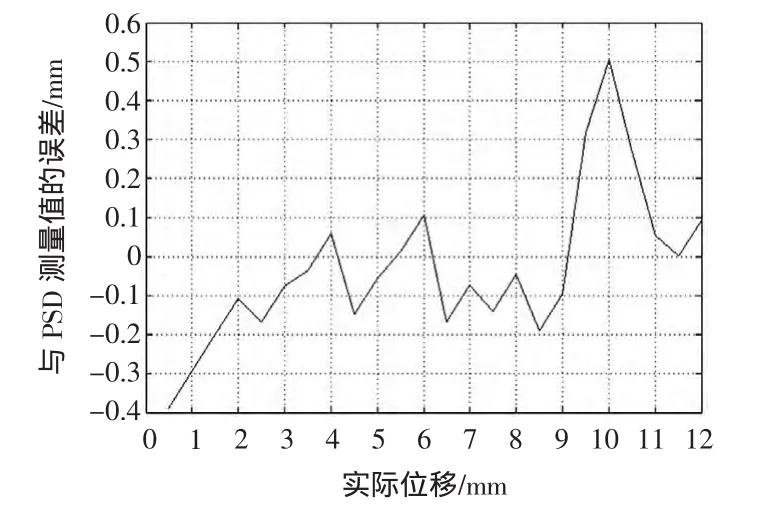
图8 双光斑检测中80 kHz光斑实际位置与测量位置误差曲线
[1] 谢春茂.无人机系统产业发展及市场研究[J].科技传播,2013(11):77-79.
[2] 李屹东,李悦霖.察打一体无人机的特点与发展[J].国际航空,2014(9):24-27.
[3] 黄梅珍.位置敏感探测器的研究[D].杭州:浙江大学,2001.
[4] 曾超.基于二维位置敏感探测器PSD的研究及应用[D].杭州:浙江大学,2003.
[5] 秦岚,刘志辉.PSD相位法测量技术研究[J].传感技术学报,2009(5):760-763.
