基于机器视觉的安全帽自动识别技术研究
2015-05-07冯国臣陈艳艳宋程程
冯国臣,陈艳艳,陈 宁,李 鑫,宋程程
(北京市交通工程重点实验室(北京工业大学),北京 100124)
在施工区,安全帽作为一种最常见和实用的个人防护用具,能够有效地防止和减轻外来危险源对头部的伤害。然而,长期以来,我国施工区作业人员普遍存在综合素质低、安全意识不强的问题,尤其缺乏基础防护设施(如安全帽)的佩戴意识,大大增加了作业风险。随着交通运输部公路水运“平安工地”创建活动开展以来,各级施工安全监管部门对作业人员的要求逐步提高,许多示范工程已经率先采用各种智能监控手段保障作业人员的人身安全。鉴于此,本文对基于机器视觉的安全帽自动识别技术进行研究,以满足施工单位及各级安全监管部门的实际监管需求,切实保障施工区作业人员的人身财产安全。
目前,施工现场对安全帽佩戴情况的识别主要以人工检查的方式为主,存在监管费用高、主观干扰大、不能全程监控等一系列问题,通过在施工现场布设视频监控设备或利用现有的施工监控设备,采用机器视觉的相关方法进行安全帽的自动识别,可以实现对作业人员安全帽佩戴情况信息的全程快速识别,在降低监管费用的同时提升了监管信息化水平。国内已经有许多专家对安全帽的自动识别技术进行了研究,胡恬等[1]在着重分析小波变换和BP神经网络在安全帽识别中应用的基础上,提出了安全帽识别神经网络模型;刘晓慧等[2]采用肤色检测的方法定位人脸,再利用支持向量机(SVM)模型实现安全帽的识别;刘云波等[3]通过检测运动目标1/3部分中的像素点色度值分布情况,判断是否佩戴安全帽及识别安全帽的颜色。现有方法在特定场景下均可实现对安全帽的精确识别,但也存在对环境要求高、识别率波动大、易受环境干扰等一系列问题。
本文基于机器视觉的安全帽自动识别技术的相关方法,设计一种具有环境适应性强、检测精度高的施工区安全帽自动识别技术方法。
1 安全帽自动识别算法
安全帽自动识别算法的核心思想是在前景检测的基础上,通过前景连通域的处理,判别并跟踪作业人员,进而定位作业人员安全帽佩戴区域,最终通过分析区域像素值,判断作业人员安全帽佩戴情况,算法流程如图1所示。
1.1 图像预处理
为提高视频图像的处理速度,在图像预处理中依次对图像进行灰度化处理和图像去噪。
1)图像灰度化。
施工区中布设的视频监控采集设备所获取的普遍为彩色图像信息,为提高图像处理速度,实现实时自动监控,需对彩色图像进行灰度化处理。目前,常见的灰度化处理方法[4-5]包括:分量法、最大值法、平均值法和加权平均法。
本文采用加权平均法进行灰度化处理:根据重要性及其他指标,将R,G,B3个分量以不同的权值进行加权平均,具体公式如下:
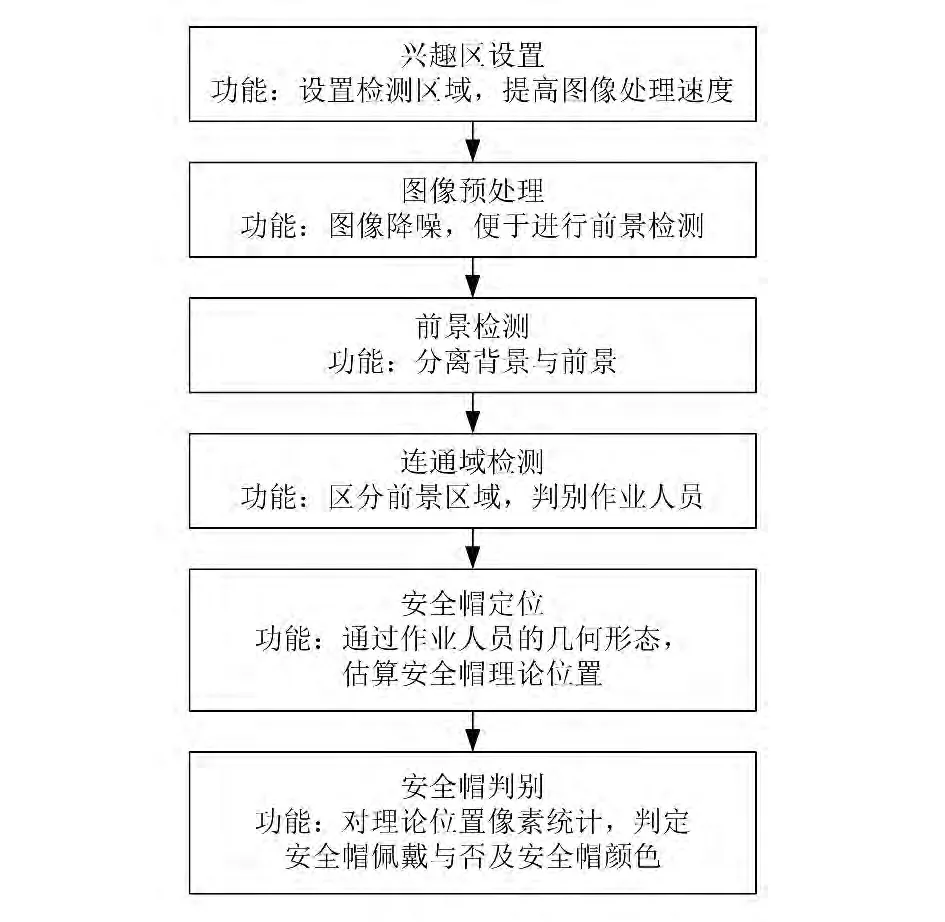
图1 安全帽自动识别算法流程图

式 中:f(i,j)表 示 灰 度 化 结 果;R(i,j),G(i,j),B(i,j)分别表示红、绿、蓝3个通道颜色变量。
2)图像去噪。
由视频监控采集设备采集的视频图像会存在一定的噪声点,为便于进行后期图像处理工作,需要去除这些噪声点。本文采用中值滤波[6]的方式去除噪声点。
中值滤波法是一种非线性平滑技术,将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值。中值滤波法用二维滑动模板,将板内像素值按大小排序,生成单调上升(或下降)的二维数据序列。二维中值滤波输出为:

式中:f(x,y),g(x,y)分别为原始图像和处理后的图像;W为二维模板,通常为2×2或3×3,本文采用3×3的模板,取模板中的中值。
1.2 前景检测
对前景图像的识别检测是提高识别环境适应性的重要因素,本文采用混合高斯模型进行前景图像的检测识别正是基于混合高斯模型的高适应性。混合高斯模型就是用高斯概率密度函数精确地量化事物,将一个事物分解为若干基于高斯概率密度函数形成的模型。
文中采用混合高斯模型[7]进行前景检测的过程如下:使用5个高斯模型来表征图像中各个像素点的特征,在新一帧图像获得后更新混合高斯模型,用当前图像中的每个像素点与混合高斯模型匹配,如果匹配成功,则判定该点为背景点,否则为前景点。采用混合高斯模型进行前景检测后得到关于前景的二值化图像,但该图像仍存在部分噪声点,采用中值滤波的方法予以剔除,此处不再赘述。
1.3 连通域检测
对连通域处理是进行人体判别和跟踪的关键,也是进行安全帽位置界定的关键,连通域处理分为人体判别和跟踪两部分内容。
1)人体判别。
通过连通域进行人体判别分为图像膨胀、边缘检测和人体识别3部分内容。
①图像膨胀。
图像膨胀是进行边缘检测的基础,直接对图像人体进行边缘检测经常会出现前景人体不连续的现象,形成对人体的多段分割,从而造成对人体的误判,因此需在边缘检测前首先进行图像膨胀处理。
对于二值图像,膨胀意味着用结构元素在图像上移动,只要结构元素中有一个点与图像中的点是重叠的就可以了,膨胀的结果是结构元素中心点划过区域的内部,因此图像的边缘就被扩大了。
②边缘检测。
边缘检测的目的是勾勒出人体的边缘形态,利用人体识别进行判断。本文采用Canny边缘检测方法[8-11]进行人体的边缘检测。具体步骤如下:
步骤1,利用方差为1.4的高斯函数模板及图像进行卷积运算,进而平滑图像,去除图像噪声点;
步骤2,计算梯度的幅值和方向时,利用一阶偏导的有限差分来进行,x和y方向的偏导数分别为(x,y)和(x,y),方向角为 θ(x,y),梯度幅值为 M(x,y);
步骤3,对梯度幅值应用非极大值抑制。由于幅值M越大,对应的图像梯度值也会越大,为确定边缘,因此需细化幅值图像中的屋脊带,只保留幅值局部变化最大的点,生成细化的边缘;
步骤4,为使Canny算子提取的边缘点更具鲁棒性,采用双阈值算法检测并连接边缘。假设高、低阈值分别为Hth和Lth,选取高阈值Hth时,采用图像梯度值对应的直方图来进行。设非边缘点数目占总图像像素点数目的比例为Hratio,根据图像梯度值对应的直方图进行累加,当累加数目达到总像素数目的Hratio时,将对应的图像梯度值计为Hth。低阈值Lth则通过Lth=Hratio*Hth计算得到。最后通过对边缘点的标记和领域关系进行连接,得到边缘检测图。
边缘内面积的计算采用边缘域内逐点累积的方法,对边缘内面积进行计算是人体初步判别的必要条件,由于视频监控采集架设的角度不同,因此边缘内面积的上界和下界阈值存在差异,本文判别人体的像素面积范围为[45 000,60 000]。
③人体识别。
本文采用基于模型的方法[12-13]来实现人体运动识别,根据视频序列中人体运动特征进行具体化的拟合从而建立起相应的模型,可以形象地展现目标当前的状态,重建目标过去的状态,还可以对目标将来的状态做出大致的估计。
人体模型形象直观,可以在视角变化或物体遮挡等外在因素存在的前提下很好地表征人体运动过程中肢体的变化,理论上识别正确率几乎可以达到100%。
2)人体跟踪。
人体跟踪的目的是为了对同一目标进行持续追踪,避免重复报警信息。人体跟踪[14-15]的方法为在当前帧每个识别框的中心建立一个较小的搜索区,若上一帧中有识别框的中心出现在该搜索区内,则判定这两个识别框为相邻两帧间的同一作业人员目标,从而实现跟踪。
1.4 安全帽定位识别
在人体判别的基础上,通过对安全帽位置的估测实现安全帽的检测识别。安全帽位置估测过程为:以人体边缘外围构建边界矩形,要求边界矩形包含所有人体边缘,以边界矩形上边缘作为估测矩形的上边缘,边界矩形上边缘与下边缘间1/10靠近上边缘位置作为估测矩形下边缘,边界矩形左边缘与右边缘间1/4靠近左边缘位置作为估测矩形左边缘,边界矩形左边缘与右边缘间3/4靠近右边缘位置作为估测矩形右边缘,形成安全帽估测矩形。
对估测矩形内的像素特征进行判别,若满足安全帽像素特征,则判定为已佩戴安全帽,若不满足,则判定为未佩戴安全帽。
安全帽特征的选取是安全帽识别的关键因素,研究发现,安全帽的角点特征并不明显,并且角点特征针对不同角度的摄像头的适应性较差,若采用SIFT角点特征[16]的方法进行安全帽自动识别,效果不明显。本文以颜色统计特征的方法[17-18]进行安全帽的检测,具体步骤如下:
步骤1,获取安全帽估测位置矩形的原彩色图像的三通道像素点值(即R,G,B值)。
步骤2,分类当前所采用的安全帽的颜色类型,常用的包括红、黄、白3种颜色。
步骤3,根据不同色彩的安全帽建立阈值选取范围,各颜色安全帽阈值见表1。
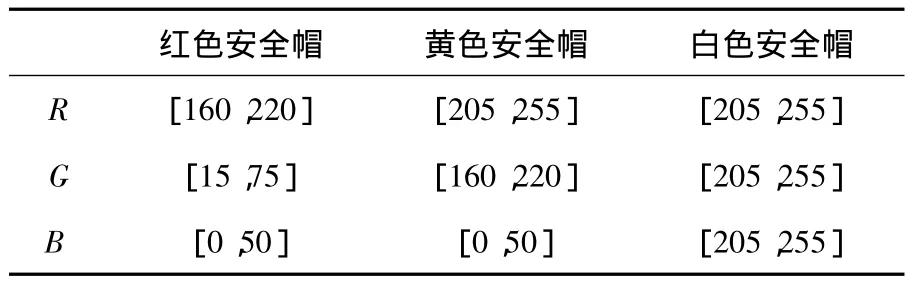
表1 安全帽颜色阈值表
步骤4,逐点统计安全帽估测区域的像素点,若像素点的R,G,B值均满足安全帽颜色阈值表中某种安全帽的颜色阈值范围,则将该点记录下来。
步骤5,对统计点进行分类,判断各种安全帽颜色点的数量占整个统计区域像素点数量的比例,若超过某一比例则判定其佩戴相应颜色的安全帽,若均达不到要求,则判定其未佩戴安全帽。
步骤6,对未佩戴安全帽的人员进行警示。
安全帽自动识别技术示意图如图2所示。

图2 安全帽自动识别技术示意图
2 实例验证
为验证识别算法的准确性,在广佛肇高速公路进行了现场实验,实验过程如下:
步骤1,将监控设备架设在适当位置,确定兴趣区。
步骤2,1名实验人员不佩戴安全帽进入检测区域,重复实验15次,记录未佩戴安全帽检测次数。
步骤3,实验人员分别佩戴红、黄、白色安全帽进入检测区域,重复实验10次,记录每种颜色下显示未佩戴安全帽的次数。
步骤4,1名实验人员佩戴安全帽,1名实验人员不佩戴安全帽,两人同时进入检测区域,重复实验10次,记录显示未佩戴安全帽人员的次数。
经上述实验过程后,得实验结果见表2。
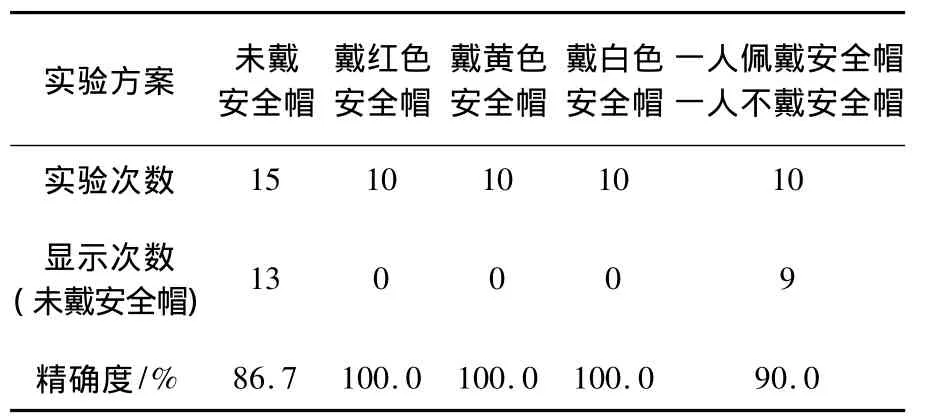
表2 实验结果
实验结果显示,单人或多人同时进入检测区域时,存在漏检的情况,但整体检测精确度平均达到92.1%,表明该识别方法具有较高的识别准确率。实验过程中,实验环境较差,扬尘、机械振动频繁,该方法检测可靠度较高,受环境变化影响较小,表现了高度的环境适应性。
3 结束语
本文提出了一种基于机器视觉的施工区安全帽智能识别技术方法,该方法采用混合高斯模型进行前景检测,通过对连通区域人体边缘的检测处理,实现对作业人员的自动判别和跟踪,最后对估测矩形内的像素进行统计分析,实现安全帽的自动识别检测。
安全帽自动检测中采用模式识别方式,直接对头部进行特征表达,并通过反复训练,得到不同类别安全帽的特征表达,提高不同环境下的检测准确率。实验结果显示,该方法具备较高的环境适应性和检测准确率,可以实现对施工区作业人员安全帽佩戴情况的自动识别检测,可辅助各级施工区安全监管单位进行施工区智能化监管,提高施工区安全监管信息化水平。
[1] 胡恬,王新刚.基于小波变换和神经网络的安全帽识别系统分析与设计[J].软件导刊,2006(23):37-38.
[2] 刘晓慧,叶西宁.肤色检测和Hu矩在安全帽识别中的应用[J].华东理工大学学报:自然科学版,2014(3):365-370.
[3] 刘云波,黄华.施工现场安全帽佩戴情况监控技术研究[J].电子科技,2015(4):69-72.
[4] 龚爱平.基于嵌入式机器视觉的信息采集与处理技术研究[D].杭州:浙江大学,2013.
[5] 贺姣.基于色差模型的彩色图像灰度化算法研究[D].西安:西安电子科技大学,2014.
[6] 李启湛.推扫式光谱成像中药检测系统软件设计[D].广州:暨南大学,2011.
[7] Zhang Yufei,Bi Duyan.Adaptive learning algorithm based on mixture Gaussian background [J].Journal of Systems Engineering and Electronics,2007,18(2):369 -376.
[8] 张玲艳.基于Canny理论的自适应边缘检测方法研究[D].西安:西北大学,2009.
[9] 郭进,刘先勇.机器视觉标定中的亚像素中心定位算法[J].传感器与微系统,2008,27(2):106 -108.
[10]张帆,彭中伟,蒙水金.基于自适应阈值的改进Canny边缘检测方法[J].计算机应用,2012,32(8):2296-2298.
[11]崔丽.人脸检测和识别在门禁系统上的应用[J].时代教育.2012(19):175.
[12]Cunado D,Nixon M S,Carter JN.Using gait as a biometric,via phase-weighted magnitude spectra[J].Lecture Notes in Computer Science,1997(1206):95 -102.
[13]吕宪国.多视角下视频序列的人体特征提取与快速识别算法研究[D].济南:山东大学,2013.
[14]郑翔翔,张怡.基于头部检测和跟踪的人数统计方法[J].计算机应用与软件,2011,28(2):44 -46.
[15]姚敏.数字图像处理[M].北京:机械工业出版社,2006.
[16]刘琼,倪国强,周生兵.图像配准中几种特征点提取方法的分析与实验[J].光学技术,2007,33(1):62-64.
[17]韩亚伟,张有志,李庆涛,等.动态场景监控系统中人数统计算法的研究[J].计算机应用与软件,2011,28(2):260-262.
[19]张庚,徐昊.简单背景下基于灰度图像的人数统计[J].中国新技术新产品,2009(1):21-22.
