自寻的导弹制导回路等效时间常数估算方法*
2015-05-05袁耀高庆丰
袁耀,高庆丰
(北京电子工程总体研究所,北京 100854)

自寻的导弹制导回路等效时间常数估算方法*
袁耀,高庆丰
(北京电子工程总体研究所,北京 100854)
给出了自寻的导弹制导回路模型,提出了二阶系统等效时间常数的估算方法。利用该方法对制导回路动力学系统进行等效时间常数的求解,最终得到制导回路五阶系统的等效一阶系统模型。通过等效前后制导回路系统的无量纲脱靶量仿真,验证了该等效时间常数估算方法的正确性。
制导回路;等效时间常数;估算方法
0 引言
自寻的导弹的脱靶量与导弹的末制导飞行时间关系密切,一般要求导弹制导飞行时间大于制导系统总的时间常数的10倍[1-4],即制导回路的控制刚度大于10。制导回路的动力学滞后模型为高阶系统,为了在设计初期判断末制导飞行时间是否满足要求,需要求出制导回路动力学滞后模型的等效时间常数,将制导回路的动力学滞后环节用一阶等效滞后环节代替[5-9]。
1 自寻的导弹制导回路结构
图1给出了自寻的导弹的制导回路结构[3],系统中存在3个动力学环节,分别为导引头动力学滞后环节、制导滤波器动力学滞后环节和自动驾驶仪动力学滞后环节。
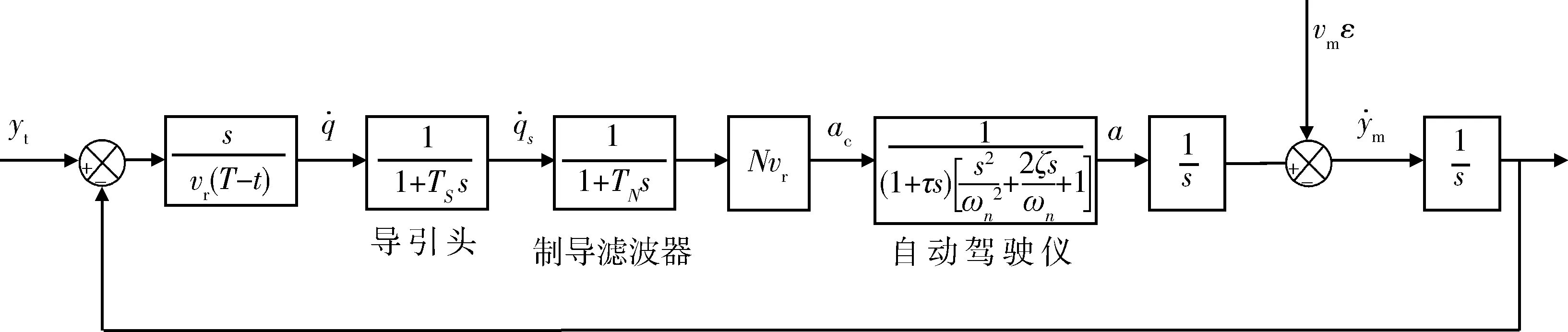
图1 自寻的导弹制导回路结构Fig.1 Guidance loop of homing missile
自动驾驶仪采用三回路自动驾驶仪,由三阶系统表示,其动力学模型为[10]
综上,制导回路可表示为
(1)
式中:a为导弹的法向加速度;N为导航比;vr为弹目相对速度。
2 二阶系统的等效时间常数
对于二阶系统,表征其振荡特性的是固有频率ωn和阻尼系数ζ。将系统的等效时间常数定义为动态响应达到其稳态值63%所需要的时间。在此定义下,该时间常数并不能准确地等于所谓“一阶时间常数”,但能较好地近似表征实际响应。二阶系统对阶跃输入的动态响应到达稳态值的63%时对应的ωnt值所求得的时间值t就是对应的时间常数τ[1]。
任何一个二阶线性系统的特性方程均可用如下形式表示:
(2)
二阶线性系统对单位阶跃输入的动态响应方程式为

(3)
ζ=1.0时,
h(t)=1-(1+ωnt)e-ωnt;
(4)
ζ>1.0时,

(5)
令h(t)=0.63,并将选定的ζ值代入相应方程,即可解出ωnt。按定义,该ωnt值就是对应于选定的ζ值的ωnτ数值。表1为利用这一方法解算得到的ωnt值。

表1 ζ与ωnt对应关系Table 1 Relationship between ζ and ωnt
沿用关于二阶系统近似等效时间常数的概念,可确定由2个一阶时间常数所组成二阶系统的近似等效时间常数[1]。
(6)
式(6)的特性方程为
τ1τ2s2+(τ1+τ2)s+1=0.
(7)
对比式(2)和(7)可知
(8)
(9)
由此可得
(10)
按下列步骤可近似确定与时间常数τ1+τ2等效的时间常数τ3:
(1) 利用式(10)计算得到ζ;
(2) 利用式(3)~(5)计算得到与ζ对应的ωnτ3;
(3) 利用式(8)计算得到ωn;
(4) 利用第(2)步和第(3)步的计算结果计算得到τ3。
3 制导回路等效时间常数估算方法
3.1 导引头加制导滤波器的等效时间常数
(1) 计算ζ

(2) 计算ωnτ4
查表1,ζ=1对应的ωnτ4=2.15。
(3) 计算ωn
(4) 计算τ4
即导引头加制导滤波器的等效时间常数τ4=0.322 5 s。
3.2 自动驾驶仪的等效时间常数
原自动驾驶仪模型中τ=0.3,ωn=35 rad/s,ζ=0.7,代入模型可得
则τ5=0.04。
与3.1节类似,可求得等效时间常数
τ6=0.349 2 s.
3.3 制导回路的等效时间常数
4 仿真验证[11-12]
4.1 不同导航比条件下仿真验证
取初始误差ε=0.2 rad,导弹速度vm=500 m/s,取导航比分别为N=3和N=4。对图1所示的制导回路和由第3节得到的等效回路模型进行仿真,2种导航比条件下由初始误差产生的脱靶量仿真结果见图2,3。由图2,3可看出,导航比N=3,在导弹制导飞行相对时间T/τT=8时,导航比N=4,在导弹制导飞行相对时间T/τT=10时,等效前后的制导回

图2 无量纲脱靶量曲线(ε=0.2 rad,N=3)Fig.2 Normalized miss distance (ε=0.2 rad, N=3)
路脱靶量均趋于0,等效模型可以较好地反映原高阶系统特性,该等效方法对不同导航比条件均适用。

图3 无量纲脱靶量曲线(ε=0.2 rad,N=4)Fig.3 Normalized miss distance (ε=0.2 rad, N=4)
4.2 不同初始误差条件下仿真验证
取导航比N=3,导弹速度vm=500 m/s,取初始误差分别为ε=0.3 rad和ε=0.5 rad。对图1所示的制导回路和由第3节得到的等效回路模型进行仿真,2种初始误差条件下由初始误差产生的脱靶量仿真结果见图4,5。由图4,5可看出,2种初始误差条件下,在导弹制导飞行相对时间T/τT=8时,等效前后的制导回路脱靶量都趋于0,等效模型可以较好地反映原高阶系统特性,该等效方法对不同初始误差条件均适用。

图4 无量纲脱靶量曲线(ε=0.3 rad,N=3)Fig.4 Normalized miss distance (ε=0.3 rad, N=3)

图5 无量纲脱靶量曲线(ε=0.5 rad,N=3)Fig.5 Normalized miss distance (ε=0.5 rad, N=3)
4.3 不同目标机动条件下仿真验证
分别取目标加速度at=10 m/s2和at=30 m/s2,对图1所示的制导回路和由第3节得到的等效回路模型进行仿真,2种目标机动条件下的脱靶量仿真结果见图6,7。由图6,7可看出,2种目标机动条件下,在导弹制导飞行相对时间T/τT=8时,等效前后的制导回路脱靶量都趋于0,等效模型可以较好地反映原高阶系统特性,该等效方法对不同目标机动条件均适用。

图6 无量纲脱靶量曲线(at=10 m/s2,N=3)Fig.6 Normalized miss distance (at=10 m/s2, N=3)
图7 无量纲脱靶量曲线(at=30 m/s2,N=3)Fig.7 Normalized miss distance (at=30 m/s2, N=3)
5 结束语
本文通过估算二阶系统的等效时间常数,求解出等效的一阶系统模型。经过等效求解,得到自寻的导弹制导回路高阶系统的等效时间常数,将制导回路的动力学滞后环节用一阶等效滞后环节来代替。制导回路仿真结果表明,该方法对不同导航比、不同初始误差、不同目标机动条件下均适用,简化后的一阶等效滞后环节可以较好地反映原高阶系统特性,可用于设计初期判断末制导飞行时间是否满足要求。
[1] 约瑟 J·哲尔格尔. 系统工程初步设计[M]. 北京:国防工业出版社,1965. Joseph J. Jerger. Systems Preliminary Design[M]. Beijing: Nation Defense Industry Press, 1965.
[2] 陈佳实. 导弹制导和控制系统的分析与设计[M]. 北京:中国宇航出版社,1984. CHEN Jia-shi. Analysis and Design of Missile Guidance and Control System[M]. Beijing:China Astronautic Publishing House,1984.
[3] ZARCHAN P. Tactical and Strategic Missile Guidance[M]. Washington D C: American Institute of Aeronautics and Astronautics, 1994.
[4] Rafael Yanushevsky. Modern Missile Guidance[M]. Boca Raton,London,New York:CRC Press,2007.
[5] 斯威特洛夫 B.T.,戈卢别夫 N.C.. 防空导弹设计[M]. 北京:中国宇航出版社,2004. Svetlov B T, Golubev N C. Air Defense Missile Design[M]. Beijing:China Astronautic Publishing House, 2004.
[6] 张望根. 寻的防空导弹总体设计[M]. 北京:中国宇航出版社,1991. ZHANG Wang-gen. Homing Air-Defense Missile Design[M]. Beijing:China Astronautic Publishing House,1991.
[7] 余超志,姚德源,夏咸松,等.导弹概论[M]. 北京:北京工业学院出版社,1986. YU Chao-zhi,YAD De-yuan,XIA Xian-song,et al. Introduction to Missile[M]. Beijing:Beijing Industry Institute Press,1986.
[8] 钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M].北京:北京理工大学出版社,2008. QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan. Dynamics of Missle[M]. Beijing:Beijing Institute of Technology Press, 2008.
[9] 赵善友. 防空导弹武器寻的制导控制系统设计[M]. 北京:中国宇航出版社,1992 ZHAO Shan-you. Guidance and Control System Design of Homing Air Defense Missile[M]. Beijing:China Astronautic Publishing House,1992.
[10] 胡寿松. 自动控制原理[M]. 北京:科学出版社,2001. HU Shou-song. Automatic Control Principle[M]. Beijing:Science Press,2001.
[11] 林德福,祁载康. 比例导引末导时间的等效时间常数估算法[J]. 系统仿真学报, 2006,18(11):3026-3029. LIN De-fu, QI Zai-kang. Estimation on Engagement Time of Proportional Navigation Guidance System using Approximate Time Constant[J]. Journal of System Simulation,2006,18(11):3026-3029.
[12] GARNELL P. Guided Weapon Control Systems[M]. 2nd ed. Qi Zai-kang, Xia Qun-li,Translated.Beijing: Beijing Institute of Technology,2004.
Estimation Method of Approximate Time Constant in Guidance System of Homing Missile
YUAN Yao,GAO Qing-feng
(Beijing Institute of Electronic System Engineering,Beijing 100854,China)
The guidance system model of homing missile is presented. The estimation method of approximate time constant in two-order system is proposed. Based on the method, the approximate time constant of guidance dynamic system is obtained with solutions, and the approximate one-order system model of the five-order guidance system is gained. By comparing the simulation results of the normalized miss distance between the two guidance systems, estimation method of approximate time constant is validated.
guidance loop; approximate time constant; estimation method
2014-03-13;
2014-07-20
有
袁耀(1984-),女,湖南湘潭人。工程师,硕士,研究方向为导弹总体技术。
10.3969/j.issn.1009-086x.2015.03.010
TJ765
A
1009-086X(2015)-03-0055-05
通信地址:100854 北京市142信箱30分箱