舰船ISAR图像特征提取方法研究*
2015-05-03杨效余
杨效余, 于 勇, 褚 超, 张 彬
(航天长征火箭技术有限公司北京100076)
引 言
雷达成像不仅分辨率高、穿透性好、抗干扰能力强,而且能够全天时全天候工作,可以弥补可见光与红外成像技术的不足,具有重要的军用和民用价值。
ISAR雷达能够获得非合作运动目标(如飞机、舰船等)的精细图像,是极为重要的一种目标探测手段。ISAR工作模式为雷达固定不动,而目标旋转,目标方位维成像信息来源于目标相对于雷达的转动。在实际应用中,ISAR除了固定在地面上,也可以装在飞机、舰船等运动平台上,对空中、海面或地面的运动目标成像。由于ISAR成像假设电磁波前为平面波前,要求目标尺寸远远小于目标与雷达之间的距离,因此ISAR通常用于对远距离的非合作运动目标成像。
舰船目标的监视、检测和识别是海面态势感知的重要内容。海面面积广阔,各类目标分布广,以岸基ISAR雷达为传感器的海面目标探测系统,具备搜索、跟踪、成像等多种工作模式,可以对海面目标进行捕获、跟踪、高分辨率成像。它具有远距离探测、高分辨率二维成像能力,能在全天时、全天候条件下工作,能获取船只目标的距离、航速、航向、位置等信息。由于它具有时效性强、探测精度高、全天候等优点,因而是海面态势感知的重要手段。基于ISAR二维图像提取的特征量包含了较丰富、直观的目标特征信息,可以从获取的高质量舰船ISAR图像中提取舰船尺寸、形状、结构等特征作为舰船识别的有效特征量。
国内外学者针对ISAR图像目标特征提取与识别算法[1~7]做了大量研究,提出了基于多特征的船只目标识别方法,但算法模型较为复杂。本文提出一种复杂度低且较为实用的舰船ISAR图像目标特征提取方法。
1 ISAR图像增强
利用岸基ISAR雷达探测海面舰船目标,通过雷达信号处理[8,9]获取的实测ISAR二维距离-多普勒图像受海况等影响,存在背景噪声。图1为实测ISAR的归一化灰度图像。由图可见,舰船目标并不是一个连续的整体,且存在大量背景噪声。为获取优质的目标二值图像,减少背景噪声,需要对实测ISAR图像进行增强,抑制背景噪声。这里,我们采用灰度变换进行图像增强,若原始图像f(i,j)的灰度范围为[a,b],变换后图像g(i,j)的灰度范围扩展到[c,d],有

其中Mf表示f(i,j)的最大值。
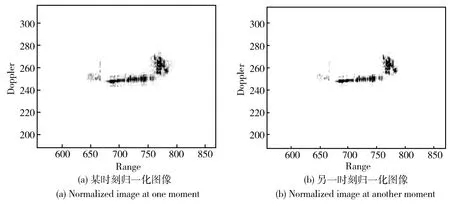
图1 不同时刻舰船目标ISAR图像Fig.1 Ship ISAR images at differentmoments
2 图像分割与特征提取
ISAR图像的特点是目标像素在整个图像中只占少量像素,且目标像素较暗,因此可以将图像反色后,采用阈值分割方法把目标从背景中提取出来。从分割结果可以看出,目标感兴趣区域会出现断续或空心情况,需要先进行像素聚类处理[2],然后再进行特征参数提取。
2.1 迭代图像分割与像素聚类
2.1.1 图像分割
对ISAR图像的背景能量进行分析可以看出,背景能量类似瑞利分布,而且目标强度在背景之上。对于阈值分割方法,阈值的选取决定了分割效果。对于ISAR图像,可以采用单阈值分割方法,也可以采用多阈值迭代分割方法,其中多阈值迭代分割方法会获得更好的分割效果。先统计整个图像的灰度均值μ和标准差σ,取分割阈值TH=μ+kσ,k=4,3,2,1,0,-1,-2,-3,-4,再进行图像分割,得到二值化图像。由于目标灰度值高于背景灰度值,因此分割阈值从大到小取值,首次分割阈值取μ+4σ。
2.1.2 像素聚类
图像分割得到的二值图像,可能存在许多孤立点或像素数量很少的亮区域,导致目标区域可能会出现断裂和空心等现象,需要进行像素聚类处理。
①滤除孤立像素点或像素数量很少的区域
遍历图像,利用图像8邻域关系,对感兴趣区域内每个像素进行8邻域关系判断,若该像素的8邻域目标像素个数大于阈值,则保留该像素;否则,去除该像素。
②标记感兴趣区域,滤除面积较小的感兴趣区域
对于舰船目标,在高分辨率ISAR成像情况下,其目标像素个数可达到几千个左右,而不是一个、几个或几十个像素组成的点目标。依据这个特点,对二值图像进行标记,去除面积较小的感兴趣区域。
③处理目标的断裂和空心区域
在滤除了图像的孤立点和像素数量少的亮区域后,可能存在目标的断裂或空心等现象,采用矩形结构元素形态学闭操作,可以使整个包含目标的区域连接成一个整体。
2.1.3 迭代图像分割条件判定
受海况散射等原因影响,在ISAR图像中舰船目标有可能会分成船头、船尾两个部分。在首次图像分割(分割阈值μ+4σ)与像素聚类后,需要判定迭代分割条件,此时计算像素聚类处理后图像中面积最大和面积第三大两个感兴趣区域间最小距离。若该距离小于预设阈值,并且最大感兴趣区域面积与第三大感兴趣区域面积之比小于预设阈值,取分割阈值TH=μ+kσ进行图像分割,第二次分割阈值取μ+3σ,接下来每次分割阈值取k减1,重复图像分割和像素聚类处理;否则,结束图像分割处理。
图2为ISAR图像分割与像素聚类中间处理结果,其中图2(a)为雷达实测得到的归一化ISAR反色图像;图2(b)为取阈值TH=μ+3σ对图2(a)分割的结果;图2(c)为尺寸滤波后结果图像,已去除了分割图像中孤立像素点、像素数量很少的区域和面积较小感兴趣区域;图2(d)为像素聚类后结果图像,已采用矩形结构元素形态学闭操作,对舰船目标存在的断裂和空心区域进行处理。
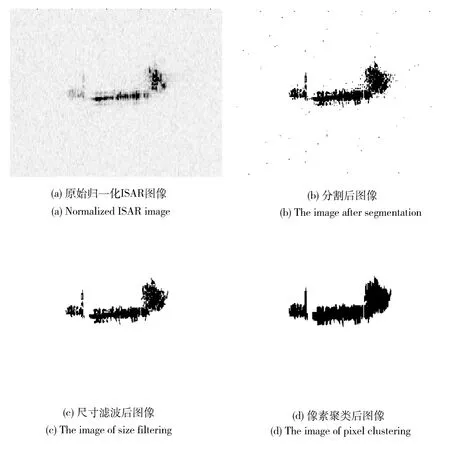
图2 ISAR图像分割与像素聚类Fig.2 Image segmentation and pixel clustering of ISAR image
2.2 特征参数提取
ISAR图像舰船目标特征主要包括舰船长度、轮廓、上部构造、主桅高度等,图3为舰船目标特征提取示意图,图中L表示舰船长度,Δf表示主桅高度。
2.2.1 中心线特征参数提取
Hough变换可以用来检测图像中的线段[1]。本文将Hough变换对线段的检测扩展至对线段组的检测,得到与舰船主体相吻合的线段组的位置、宽度和方向,该方向上长度最大位置即为中心线位置。中心线将舰船分成两个部分,即上部构造和船体(包含甲板)。
2.2.2 船长度和主桅高度特征参数提取
利用外接矩形提取船长度和主桅高度特征参数,这里外接矩形的一条边需与中心线方向平行,而该边的长度即为船长度,外接矩形的另一条边与中心线相交,该边在中心线桅杆一侧的边长Δf即为主桅高度。
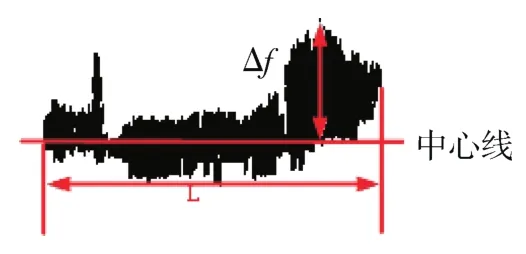
图3 特征参数提取示意图Fig.3 Schematic diagram of featureparameter extraction
3 仿真结果与分析
在岸基ISAR雷达观测试验中,通过雷达信号处理得到舰船目标ISAR实测图像数据,对其进行图像增强、图像分割、像素聚类等预处理后,获得船只目标感兴趣区域。利用Hough变换检测出船只目标的中心线,对船只目标感兴趣区域运用外接矩形操作提取船长度和主桅高度等特征参数。图4为ISAR图像数据特征参数提取的中间过程图像。从图中可以看出,ISAR原始归一化图像经过图像增强后,增加了目标与背景的对比度,更有利于图像分割。图像分割后发现存在非目标区域,需要进行滤波和像素聚类处理,最后获得有利于特征参数提取的目标感兴趣区域,进而得到目标特征参数。
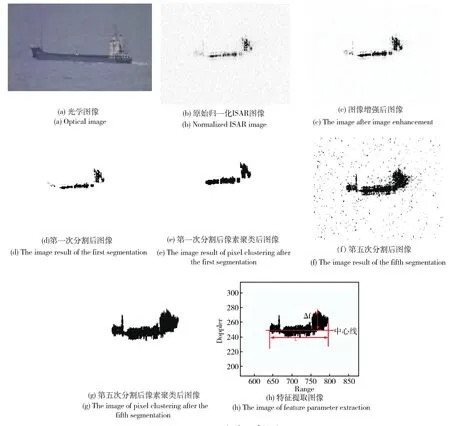
图4 ISAR图像特征参数提取Fig.4 Feature parameter extraction of ISAR image
图4(a)为合作舰船目标光学图像;图4(b)为岸基ISAR雷达观测图4(a)舰船目标的实测图像数据;图4(c)为对图4(b)进行灰度变换图像增强后的结果图像;图4(d)为取阈值TH=μ+4σ对图4(c)作第一次阈值分割的结果图像;图4(e)为对图4(d)进行像素聚类处理后的结果图像,它去除了图4(d)中像素数量少的区域和目标中存在的断裂及空心,作迭代分割条件判定,减小分割阈值,继续分割图像;图4(f)为取阈值TH=μ对图4(c)作第五次阈值分割后的结果图像;图4(g)为对图4(f)进行像素聚类处理后的结果图像,它去除了图4(f)中像素数量少的区域和目标中存在的断裂及空心,作迭代分割条件判定,终止图像分割;图4(h)为舰船目标特征参数提取图像。
预先测量得到合作舰船目标的真实长度lrel为110m,主桅真实高度frel为28.5m。经过ISAR图像提取得到的舰船长度lmes为116.2m,主桅高度fmes为30.1m,与真实值误差较小,验证了本文方法的有效性。
4 结束语
针对ISAR船只目标图像特征参数提取问题,本文对获取的实测图像数据作线性灰度变换实现图像增强,对增强后的图像进行迭代图像分割与像素聚类处理,获得目标感兴趣区域,最后通过特征参数提取获取目标特征参数。仿真实验验证了算法的有效性。
[1]杜琳琳,安成锦,陈曾平.一种舰船ISAR图像中心线特征提取新方法[J].电子与信息学报,2010,32(5):1023~1028.Du Linlin, An Chengjin, Chen Zengping.A New Algorithm for Ship Center Line Extraction in ISAR Image[J].Journal of Electronics&Information Technology, 2010,32(5):1023 ~1028.
[2]Musman S, Kerr D, Bachmann C.Automatic Recognition of ISAR Ship Images[J].IEEE Transaction on Aerospace and E-lectronic Systems,1996,32(4):1392~1403.
[3]Yuan C, Casasent D.Composite Filters for Inverse Synthetic Aperture Radar Classification of Small Ships[J].Opt.Eng.,2002,41(1):94~104.
[4]Pastina D, Spina C.Multi-feature Based Automatic Recognition of Ship Targets in ISAR[J].IETRadar Sonar Navigation,2009, Vol.3, ISS.4,406 ~423.
[5]唐 宁,高勋章,黎 湘.ISAR像自动识别中的预处理算法[J].系统工程与电子技术,2011,33(3):46~48.Tang Ning, Gao Xunzhang, Li Xiang.Pre-processing of ISAR Images in Automatic Target Recognition[J].Systems Engineering and Electronics,2011,33(3):46~48.
[6]Zeljkovic V, Li Q, Vincelette R, et al.Automatic Algorithm for Inverse Synthetic Aperture Radar Images Recognition and Classification [J].IETRadar, Sonar and Navigation, 2010, 4(1):96 ~109.
[7]Maki A,FukuiK,Onoguchi K,etal.ISAR Image Analysis by Subspace Method:Automatic Extraction and Identification of Ship Profile[C]//Proceedings 11th International Conference on Image Analysis and Processing,2001,523~528.
[8]郑泽星.舰船目标ISAR成像研究[D].哈尔滨工业大学硕士学位论文,2007.Zheng Zexing.Study of ISAR Ship Imaging[D].Dissertation for the Master Degree in Engineering, Harbin Institute of Technology,2007.
[9]马瑜杰.舰船目标成像方法及实时处理软件的研究[D].西安电子科技大学硕士学位论文,2009.Ma Yujie.Study of Ship Imaging and Real-time Processing Software[D].Dissertation for the Master Degree in Engineering, Xidian University, 2009.
