测量船磁罗经自差校正技术研究
2015-05-03王化伟
杨 洋,舒 敏,韩 璐,王化伟,汤 楹
(中国卫星海上测控部,江苏 江阴 214431)
测量船磁罗经自差校正技术研究
杨洋,舒敏,韩璐,王化伟,汤楹
(中国卫星海上测控部,江苏 江阴 214431)
根据航天测量船结构特点,分析测量船磁罗经的受力以及罗经自差变化的原因,针对测量船航线途径磁赤道的航程,提出准确校正测量船磁罗经自差及保证自差系数稳定的方法。
磁罗经;自差;校正
近年来测量船经常需要进行远洋航行,有时还需要驶入高纬度区域开展工作。测量船配备有各种先进的导航仪器,但陀螺罗经和磁罗经仍是船舶的主要指向设备。磁罗经作为传统的导航仪器依靠地球的磁性指向,简单可靠,被国际海事组织(IMO)确定为必备设备。但磁罗经最大的缺点是受地磁和船磁的作用而产生自差,并且自差还会随航行地区纬度的变化、船磁的变化而变化。
测量船磁罗经校正工作通常选择在长江口锚地进行,由于该地船舶密度大,校正时间紧张,校正工作一般只能粗略完成,校正精度难保障;且选择在一地校正,很难严格区分船舶不同性质的磁力,船舶感应磁力部分只是被概略消除。随着船舶航行纬度的变化,自差会重新出现。为保证船舶行驶安全,确保导航设备工作的准确性,航海人员不仅应清楚船舶自差的变化情况,还必须能够校正自差。为此,就测量船磁罗经的受力情况,对自差变化的原因进行分析和探讨,进而针对测量船的特殊船舶结构提出准确校正测量船磁罗经自差,保证自差系数稳定的方法[1-8]。
1 测量船磁罗经受力情况分析
测量船主要从事无线电测量工作,船体结构比较特殊,在甲板上搭载有各种结构的钢铁材质天线。天线底座与船体被地磁力磁化后,根据材料性质的不同会分别产生一定的硬铁磁力和软体磁力,影响罗经指向,产生自差。此外,由于甲板上搭载的微波天线需频繁进行大功率工作,产生的热效应在一定程度上也会影响船磁的稳定性,使罗经自差发生变化。测量船甲板设备见图1。
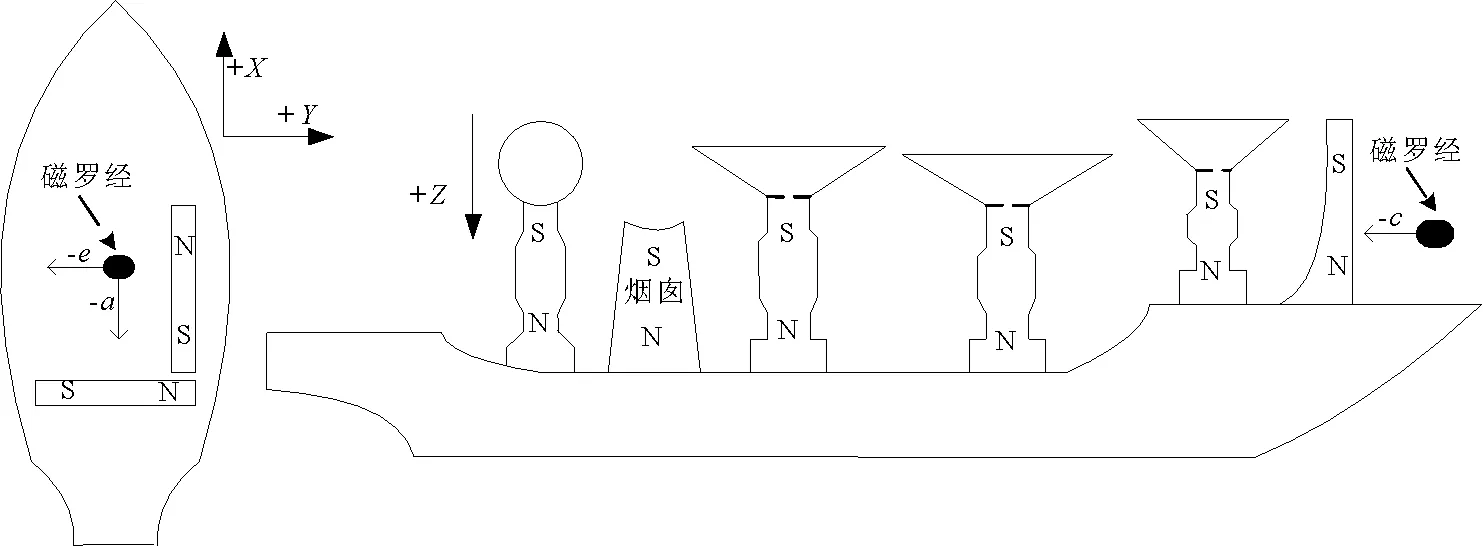
图1 测量船磁罗经受力分析示意
由图1可见,从船体平面结构看,船体龙骨、纵梁、船壳板、横梁、横隔堵等纵横软铁很多,大部分首尾左右连续,且在罗经处首尾左右中断的软铁不多,即它们产生的软铁系数为a<0和e<0,又因船的长度大于宽度,横软铁两端磁极至罗经的距离要比首尾软铁两端磁极至罗经的距离近,即软铁作用力横向比纵向大,软铁系数|e|>|a|。
磁罗经安装在驾驶台顶前部,在磁罗经后方分布有桅杆、天线底座、烟囱等大型钢铁材质构件,这些设备的上沿接近磁罗经,被地磁力磁化后产生的软铁系数为k>0,c<0,且c值较大,与普通船舶相比有很大的差异,是测量船磁罗经自差产生的主要因素之一。
硬铁力在水平面上的分力为P、Q、R,其大小和方向已在造船时由船台方向及罗经安装位置决定,由于船上硬铁数量多,硬铁力较软铁力对磁罗经自差产生的影响大得多。
测量船磁罗经半圆自差主要由力B′λH和C′λH影响产生。
式中:cZ——软铁力,由烟囱和天线底座及桅杆中的软铁材质被感应磁化后产生;
P、Q、R——硬铁力,由船体和天线底座及桅杆中的硬铁材质被磁化后产生。
象限自差主要由D′λ=(a-e)/2力影响产生;倾斜自差主要由-[R+(k-e)Z]i和-[R+(k-a)Z]i力影响产生。B′λH、C′λH与船航向和船所在的磁纬度有关,倾斜自差与船所在的纬度有关,D′λ力仅与船航向有关。
2 测量船磁罗经自差变化的原因
磁罗经校正自差原则:由硬铁船磁引起的自差,应以磁铁力加以消除;由感应船磁引起的自差,应以软铁消除[9],人为地增加磁性与船磁相同、方向相反、大小相等的磁力以消除自差。
测量船磁罗经的自差校正工作通常选择在长江口水域完成,主要对罗经的象限自差、半圆自差和倾斜自差进行校正。象限自差是由软铁系数的感应磁力产生,单独使用软铁校正器对其进行校正,两者的磁力即可处于良好的抵消状态,校正结果不会随着船舶行驶纬度的变化发生改变。半圆自差由南北半圆自差和东西半圆自差两部分组成,通过对测量船磁罗经的受力情况分析可知,南北半圆自差主要是由船舶硬铁力Q影响产生,校正时通过加入横向磁棒加以抵消即可准确校正,当船舶行驶纬度发生变化时,这部分自差将不会发生改变;而东西半圆自差则是由船舶硬铁力P和软铁力cZ共同作用的结果,在一地进行校正时,很难将这两种性质的磁力严格分开,通常软铁力cZ只是被概略的消除,东西半圆自差则主要是被放入的纵向磁棒消除,即
某高速公路设计速度为100km/h,路基宽度28m,路面结构形式为半刚性基层沥青路面,基层设计为34cm水泥稳定碎石,考虑到开放交通后,交通量较大,可能有大量重型运输车辆通行,研究决定在试验路使用异步连续摊铺技术进行半刚性基层施工,以提高基层整体性与承载能力,为该技术在全线展开打下基础。
式中:mZ——佛式铁产生的软铁校正力;
F——纵向校正磁棒产生的硬铁校正力。
当|ΔF|与|ΔP|大小相等,符号相反时,在某一纬度上可使mZ1-cZ1+F-P=0。但这并不符合自差校正的原则,即不能用硬铁力ΔP去抵消软铁力ΔF,尽管在第一纬度上自差为零,但当船舶行驶到另一纬度时,由于地磁垂直分力Z发生变化,导致ΔF发生变化,即|ΔF|≠|ΔP|、mZ2-cZ2+F-P≠0,结果罗经又产生了自差,测量船硬软铁力cZ和P没有被分别准确抵消是引起自差变化的原因。
同理,罗经倾斜自差也是由两部分磁力产生,一部分为硬铁力R,另一部分为由软铁系数k、a、e产生的软铁力。校正倾斜自差时,也不能严格将两者分开,只是以垂直校正磁棒来消除两者的作用。当船驶入高纬度地区时,Z力增大,软铁力部分增大,校正磁棒磁力不足以抵消倾斜自差两部分作用力之和;另外当船舶驶过赤道,进入南纬度地区时,软铁力发生变化,极性相反,船体发生倾斜后将产生较大的自差。
此外,随着纬度的增加,磁罗经的指北力也越差,即使自差力不发生变化,所产生的自差也会比原来的自差变化的大,这一点也是自差发生较大变化的原因,不能忽视[10]。
3 测量船磁罗经校正方法设计
随着船舶航行,地磁力的变化是不可避免的,要想使自差尽量少发生变化,关键的问题是使罗经的软铁和硬铁剩余自差越小越好,特别要准确地放置佛氏铁,以减小罗经软半圆自差的变化。
测量船经常途径磁赤道,且航线跨越纬度通常大于10°,利用航线优势可以使用磁赤道法精确测算cZ和P力,从而准确校正磁罗经自差。
3.1校正原理
船舶在航经磁赤道时,由于地磁垂直分力为0,即Z=0,此时不管船体的软铁系数c有多大,cZ=0,则B′λH=P。测量船可利用磁赤道的地理特性,进行磁罗经校正工作,准确获知船硬铁力P值,进行精确校正。待船舶回到中纬度地区后,再在E和W航向上,以爱利法用佛氏铁(原磁棒不动)校正半圆自差,即可达到精确抵消cZ和P力,准确校正磁罗经的效果。
3.2校正方法
测量船根据航渡计划计算途径磁赤道的时间,并根据任务的执行情况安排磁罗经校正工作。
1)计算要经过磁差为0°磁赤道的地理纬度,并根据气象传真图分析该地区的海况是否适合进行磁罗经校正工作。如校正条件允许,提前对磁罗经罗盆、罗经架、罗经柜、磁棒、常平环等活络部件进行检查、清洁及上油养护。
2)船舶到达预定海域后,采用爱利法校正自差,利用与电罗经比对,太阳影方位辅助的方法,按照先校正半圆自差、再校正象限自差、最后测定剩余之差的顺序进行磁罗经校正工作,其中在校正东西半圆自差过程中,只使用纵向磁棒对自差进行校正,不得使用佛氏铁或其他软铁校正器。
3)待船舶行驶至中纬度地区时,在海况良好的情况下,分别在东、西两个航向上按照爱利法的操作要求,只使用软铁校正器对磁罗经东西自差进行校正,抵消船体软铁磁力cZ对罗经的影响。
3.3校正中的注意事项
校正自差时船舶的航向应为磁航向,船舶在进入一个新的航向时应把定一段时间,待罗盘指向稳定后再开始校正。校正时应检查罗经周围是否有临时增加的电器或铁磁物件,船上各项设备应保持在航行状态,校正人员随身不得携带磁性物件。校正时放入的磁棒位置应尽量对称,离磁针宜远不宜近,增加或减少佛氏铁时,应使软铁处于距顶端1/12全长处与磁针在同一水平面上。
3.4校正方法的可行性
测量船磁罗经校正方法的实施主要是在磁赤道附近海域完成,由于其特殊的地理位置,能够为磁罗经校正工作提供十分良好的校正条件。
1)由于校正海域地理纬度较低,相对风浪较小,船舶能保持正平状态,倾斜自差影响极小。
2)在磁赤道由于磁罗经的指北力最大,垂直力最小,且远离陆地能够有效避开港口附近磁场的影响,船舶小的改向,磁罗经都能及时反应,十分便于及时测算罗经自差及其变化趋势。
3)磁赤道及附近,范围大,船舶密度小,船舶旋回余地大,能够为校正人员提供充裕的时间。
[1] 季本山.磁罗经自差的数字化校正法[J].航海技术,2009(6):32-35.
[2] 杨晓东.高纬度区域的地磁导航技术研究[J].船海工程,2010,39(5):128-133.
[3] 瞿国环.渔船远航中磁罗经自差自行校正的探讨[J].上海水产大学学报,1994,3(3):164-167.
[4] 关政军.船用磁罗经自差变化的原因[J].大连海事大学学报,2001,27(3):10-13.
[5] 李文福,王曦.安装在船舶上的磁罗经为什么需要校正[J].天津航海,2007(4):50.
[6] 关政军,戴冉.实用的校正磁罗经自差计算程序[J].大连海事大学学报,1995,21(1):41-46.
[7] 冯桂兰,田维坚,葛伟,等.数字磁罗经系统的设计[J].测控技术,2006,25(8):86-88.
[8] 赵柯,时昌金,王则胜.利用卫星定位实现对爱利法消除磁罗经自差的改进[J].船海工程,2009,38(6):139-140.
[9] 鄢天金.磁罗经校正技术[M].北京:人民交通出版社,1995.
[10] 瞿国环.渔船远航中磁罗经自差自行校正的探讨[J].上海水产大学学报,1994,3(3):164-167.
Study on the Correction Method for MagneticCompass Deviation for Space Tracking Ship
YANG Yang, SHU Min, HAN Lu, WANG Hua-wei, Tang Yin
(China Satellite Maritime Tracking and Controlling Department, Jiangyin Jiangsu 214431, China)
The force state of magnetic compass and the reason of compass deviation modification are analyzed, according to the structural features of the space tracking ship. Taking the chance of ship line via magnetic equator, a method is presented to provide accuracy correction for magnetic compass deviation and keep deviation coefficient maintain stability.
magnetic compass; deviation; correction
10.3963/j.issn.1671-7953.2015.01.033
2014-08-18
杨洋(1983-),男,硕士,工程师
U666.151
A
1671-7953(2015)01-0131-03
修回日期:2014-08-27
研究方向:磁罗经校正技术及无线电计量
E-mail:yy1167@163.com
