基于嵌入式PC的机器人运动控制系统设计
2015-04-25赵彬张艳荣高宏力孔德松黄晓蓉
赵彬,张艳荣,高宏力,孔德松,黄晓蓉
(西南交通大学机械工程学院,四川成都610031)
0 前言
随着机器人技术的不断发展,机器人在许多行业得到了广泛的应用。目前机器人电控系统多采用多重主从结构的控制方案。这种结构由于单个芯片的处理能力有限,位置检测、电机驱动、路径规划等不同的任务需要不同的控制单元处理,系统结构复杂,且采用这种方案的机器人在复杂电磁环境的工业环境中,其稳定性和可靠性难以保证。
文献[1] 采用了ARM7 + AVR 单片机的结构,系统结构复杂,精度不高。文献[2] 基于嵌入式PC/104 的控制系统,实时性还有待提高。文中设计的三轮全向移动机器人控制系统,采用基于PC +现场总线+ 分布式I/O 的体系结构,硬件结构简单紧凑。嵌入式PC 的高速运算能力和软PLC 的高优先级,保障了程序的执行效率和系统的实时性。
1 三轮全向驱动系统的运动学模型
三轮全向驱动结构与四轮结构和两轮差动的结构相比,具有运动速度快、转向灵活以及在平面上的自由度高等特点,在有限空间的环境中运动时,具有更小的转弯半径和更灵活的路径选择,因此文中选用了三轮全向驱动的结构。
三轮全向驱动系统的驱动轮由3 个质量和大小均一致的全向轮构成,任意两轴之间的夹角θ =120°,轮子半径为r。建立如图1 所示的世界坐标系XOY,以机器人的中心Q 为原点建立机器人坐标系xQy,各轮中心到Q 的距离均为L。

图1 三轮全向驱动系统示意图
设v1、v2、v3分别为3 个全向轮的线速度,Vx、Vy分别为机器人在x、y 方向的分速度,各轮速度、加速度与机器人中心的速度、加速度对应关系见公式(1)、(2)[3]。
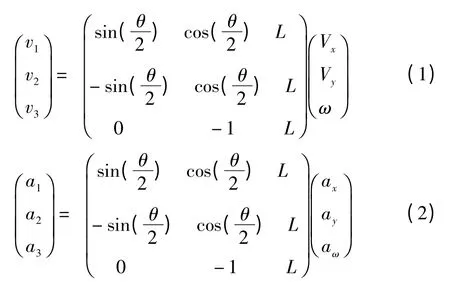
又设(x,y)为机器人的中心Q 在世界坐标系XOY 内的坐标,α 为机器人坐标系x 方向和世界坐标系X 方向的夹角,令ξ = (x y α)T,则有式 (3)、(4)的变换关系[3]:
由此得到机器人在世界坐标系中的速度和机器人3 个全向轮速度的转换关系。
2 运动控制硬件系统设计
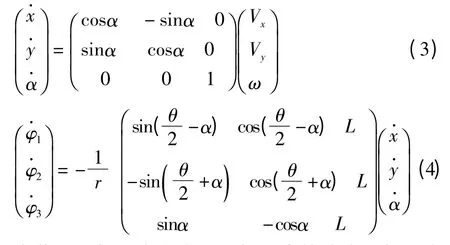
所设计的基于嵌入式PC 的三轮全向移动机器人控制系统,采用BECKHOFF 的CX1030 嵌入式PC 作为控制器,CPU 模块、RS232 串口模块以及具有EBUS 接口的电源模块通过标准的PC/104 接口相互连接,运行的操作系统为Windows CE。CX1030 后端连接EtherCAT 总线的数字量输入输出模块、传感器信号采集模块以及电机驱动模块等。3 个小型直流伺服电机经减速器传动后分别驱动3 个双排式全向轮。由于控制器的运算速度足够快,在控制器操作系统里安装TwinCAT 软件后虚拟一个软PLC,数据采集和处理、路径规划和运动控制这3 个任务均由软PLC 来完成。系统的硬件结构如图2 所示。
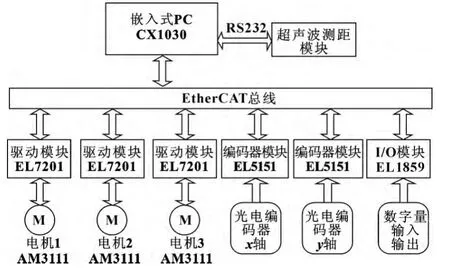
图2 硬件系统框图
机器人在按照预定指令行走的过程中,x 轴和y轴的编码器不间断检测行进位移,信号经采集后通过EtherCAT 总线将结果反馈给控制器。超声波测距模块和光电开关用于知周围环境。在机器人活动范围的地板上,关键位置涂有与地板不同的颜色,光电开关发出调制光照射在地板上,传感器接收地面的反射光并根据信号的强弱来区分地面不同区域,其输出的数字量信号通过I/O 模块采集经EtherCAT 总线传输至控制器。普通的超声波测距模块需要给一个激励信号后返回一个测量值,其工作过程复杂耗时,设计采用带有RS232 串口的超声波测距模块,该模块自身会不断测量距离,通过RS232 串口实时将测得的距离值传送给控制器。控制器依据这些环境信息和编码器位置信息综合决策,更新下一阶段的路径规划指令。
在系统中,伺服电机的性能对机器人行走路径(不考虑地面摩擦)影响很大,特别是在有较大的负载扰动时,电机能否迅速的减小速度偏差并稳定,直接影响到机器人的姿态是否稳定和路径跟踪是否准确。设计采用BECKHOFF 的AM3111 直流伺服电机,由EL7201 伺服驱动模块驱动,电机的速度环使用PI控制,其能迅速减小电机输出转速的偏差且快速趋于稳定。旋转变压器作为电机的反馈测量元件,测量精度高,且能耐受较大的振动冲击,为机器人在复杂环境中的应用提供保障。用试凑法调整电机的PI 控制器参数,当K=200,Tn=0.1 时,电机具有较好的性能。测试时,在第9 s 附近加入负载扰动,观测电机的转速变化,结果如图3 所示,电机能迅速地减小速度偏差并稳定,满足机器人的应用要求。

图3 电机测试结果
3 软件控制算法
机器人在移动的过程中是一个非线性的时变系统,传统的PID 控制高度依赖被控对象的精确模型,由于机器人制造安装过程中产生了误差,使用过程中又有负载扰动,难以得到整个系统的精确模型,因此在机器人在轨迹跟踪时取得的控制效果与预期相比并不理想,而模糊控制本身属于非线性控制方法,对被控对象的数学模型依赖程度不高,所以使用模糊控制器设计路径规划系统[4-10]。
模糊控制器设计为双输入、双输出的结构,输入为机器人当前位置与目标位置的距离D,当前姿态与世界坐标系的夹角α,输出为机器人的线速度v 和角速度ω。输入端D 的论域为[0,2 000 mm],夹角α的论域为[-π,π];输出端v 的论域为[0 mm/s,1 000 mm/s],ω 的论域为[-4 rad/s,4 rad/s]。输入变量D 和输出变量v 的模糊集定义为 {ZO,VS,SM,ME,BG,VB,EB},输入变量α 和输出变量ω的模糊集定义为 {NB,NM,NS,ZO,PS,PM,PB},4 个变量的隶属度函数均为三角函数。模糊控制规则如表1 所示。文中采用最大-最小模糊推理方法,解模糊采用重心法。

表1 机器人的线速度v 和角速度ω 的模糊控制规则表
对控制系统建模,Matlab 仿真框图如图4 所示,设机器人从起点位置跟踪一个固定点(500,100),位置计算模块计算出当前位置的与目标点的距离和夹角,将计算结果作为模糊控制器的输入,经过模糊推理和解模糊后,输出机器人线速度和角速度指令,驱动模块对给定的线速度和角速度解算为3 个驱动电机的速度,并将行进的位置坐标反馈给位置计算模块。机器人仿真运行的轨迹如图5 所示,运行轨迹平滑,没有出现剧烈震荡或者失稳的现象。
图4 仿真模型
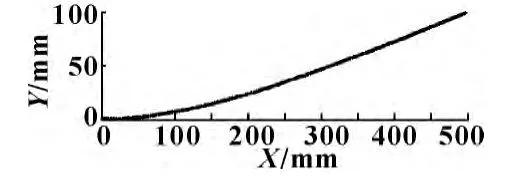
图5 仿真结果
环境感知、路径规划和电机驱动是本系统的3 个主要任务,其对实时性的要求也不同。控制器内部的软PLC 设置最多4 个任务,各个任务独立运行,根据不同任务的重要性,可设置其扫描周期和优先级。将机器人的环境感知、路径规划和电机驱动分别以设置成独立运行的任务,如图6 所示,环境感知程序设置最高的优先级,扫描周期10 ms,路径规划程序和电机驱动程序的优先级依次降低,扫描周期均设置为20 ms,保证实时性的同时节省了系统资源。各个任务之间通过全局变量进行数据交换。

图6 任务分配
4 实验结果
将机器人置于世界坐标系XOY 的原点,其坐标系与世界坐标系的夹角α =0,拟定路径点的坐标(Xset,Yset)∈{(1 000,800),(1 500,1 500),(2 000,1 700), (3 000,1 700),(4 000,100)},实验结果如图7 所示,图中的实线是在仿真环境里生成的预计路径,虚线是实际路径。
实验时,机器人在跟踪较远距离的点时速度快,在跟踪较近的点时速度较慢。由于机器人自身的惯性较大,且与地面的摩擦力小,机器人的实际行进路径与预计的路径相比有偏移,对设定路径点的重合度较好,定点精度12 mm,考虑到机器人自身体积较大,该精度可以满足应用要求。在实验中还发现,如果设定机器人的行走最大速度值过大,在跟踪比较密集的路径点时容易产生失稳震荡的现象,此时应减小速度增益。

图7 路径跟踪的轨迹
5 结束语
将嵌入式PC 应用在三轮全向机器人控制系统中,与常见的主从多级结构的电控系统相比,该系统所采用的PC +现场总线+分布式I/O 的体系结构使系统硬件结构更简单;软件中采用了模糊控制算法,系统的鲁棒性佳;不同功能的程序在软PLC 里划分为单独的任务执行,系统的运行效率高。由于嵌入式PC 的运算速度快,数据采集和处理能力强,系统还可增加其他类型的传感器,如激光雷达、图像采集设备等,对环境建模更加精确,路径规划更合理。
[1]王志龙,赵剡,杨辉,等.全向移动机器人电控系统设计[J].自动化与仪表,2012,27(9):6-10.
[2]张跃进,展爱云,刘觉夫.基于PC/104 嵌入式越障机器人系统的设计[J].微计算机信息,2008,24(9-2):13-15.
[3]季秀才.RoboCup 小型组机器人运动控制研究[D].长沙:国防科技大学,2003:51-57.
[4]刘荣.自动机器人轨迹控制系统及相关算法研究[D].成都:电子科技大学,2008:50-60.
[5]王淑坤,王宏健,吕琼莹.全向驱动电动轮系统研究[J].机械设计,2012,29(10):93-96.
[6]AICARDI M,CASALINO G,BICCHI A,et al.Closed Loop Steering of Unicycle-like Vehicles Via Lapunov Techniques[J].In IEEE Robotics &Automation Magazine,1995,2(1):27-35.
[7]INDIVERI,Giovanni.Swedish Wheeled Omnidirectional Mobile Robots:Kinematics Analysis and Control[J].IEEE Transactions on Robotics,2009,25(1):164-171.
[8]李艳,林廷圻,黄玉美,等.基于神经网络的3 自由度移动机器人跟踪方法研究[J].西安交通大学学报,2003,7(37):711-714.
[9]薛定宇,陈阳泉.基于Matlab/Simulink 的系统仿真技术与应用[M].北京:清华大学出版社,2002.
[10]KUMAR-NAGY Tomas,ANDREA Rafaela D,GANGLY Puritan.Near-optimal Dynamic Trajectory Generation and Control of an Omni-directional Vehicle[J].Robotics and Autonomous Systems,2004,46:47-64.
