三阶软件锁相环变带宽技术研究*
2015-04-25郑海昕
闫 迪,郑海昕,陈 竹
(装备学院 北京 101416)
引 言
多测速雷达系统[1]利用多部雷达的速度测量值完成导弹飞行试验的高精度外弹道测量,其中单部雷达的测速精度是影响系统测量精度的重要因素之一,而多普勒频率提取精度的提高则是单部雷达测速精度提高的关键。自适应变带宽技术一般用于锁相环快速捕获中,文献[2]用环路输入和输出频差控制环路滤波器的参数,频差较大时采用大的带宽缩短捕获时间。文献[3]根据环路是否锁定及相位误差大小对环路带宽进行调整,当相位误差较大时,使用较大带宽。现役的测速雷达通常采用数字锁相环[4],带宽一般分档可变,实际任务中为了提高目标跟踪的可靠性,环路带宽设置较大,且设置之后一般不再改变,若任务中需要变化带宽,则直接改变锁相环参数,即采用带宽硬切换的方法,但这会引起环路失锁重捕,损失一部分测速数据。
本文分析了带宽硬切换导致的环路震荡失锁问题,借鉴自适应变带宽技术,研究在保持环路锁定状态下,进行带宽软切换的方法。对变带宽涉及的环路锁定状态判决、最佳带宽确定等问题展开研究,并在低载噪比下作带宽软切换仿真。
1 三阶软件锁相环
1.1 锁相环原理
在连续波雷达中,通过锁相环提取回波信号的多普勒频率得到目标的径向速度。锁相环是一个闭环的相位负反馈控制系统,由鉴相器、环路滤波器和数控振荡器三个基本部件组成,相位传递模型[5]如图1
所示。Kd是鉴相增益,Hloop(s)是环路滤波器传递函数,K0/s是数控振荡器传递函数。

图1 锁相环相位传递模型Fig.1 Phase transfer model of PLL
三阶锁相环Z域传递函数是

其中,m、ζ和ωn是环路滤波器参数,K=KdK0,Ts是采样时间。
1.2 环路滤波器G2支路
假设多普勒频率如式(3)所示,a1是加速度,a2是加加速度。


三阶环相位误差传递函数是

对G2支路有

对G2支路输出进行线性拟合,即可得到a1和a2。
1.3 参数设置原则
①为了保证系统处于欠阻尼状态,即0<ζ<1,考虑到环路暂态时间不应太长,并具有较高的衰减速度,常取ζ=0.707。
②为了令三阶环逼近二阶环,保证m≥5,一般取m=5。
③ζ、m一旦确定后,环路带宽Bl与ωn呈线性关系,如式(7)所示。ωn是与锁相环直接相关的参数,变带宽过程中改变的直接参数是ωn,所以下面研究中的变带宽针对ωn。

2 锁定状态判决方法
变带宽的目的是提高多普勒频率提取精度,同时保持锁相环锁定状态,这里有必要对锁相环锁定状态的判决方法进行研究,通常有以下两种判断依据。
①I、Q支路输出
假设锁相环输入信号是:

其中,fc是输入信号频率,φ1是输入信号初相。
锁定状态下,NCO输出I、Q两路信号分别是:

其中,φ2是本地NCO信号初相。
混频并滤去高频分量后,得到

②鉴相器输出
采用反正切鉴相器,由式(10)得

对上面两种判断方法进行仿真,如图2所示,由于鉴相器输出直接反映了本地NCO和输入信号的相位差,所以取鉴相器输出作为环路锁定判决的依据。
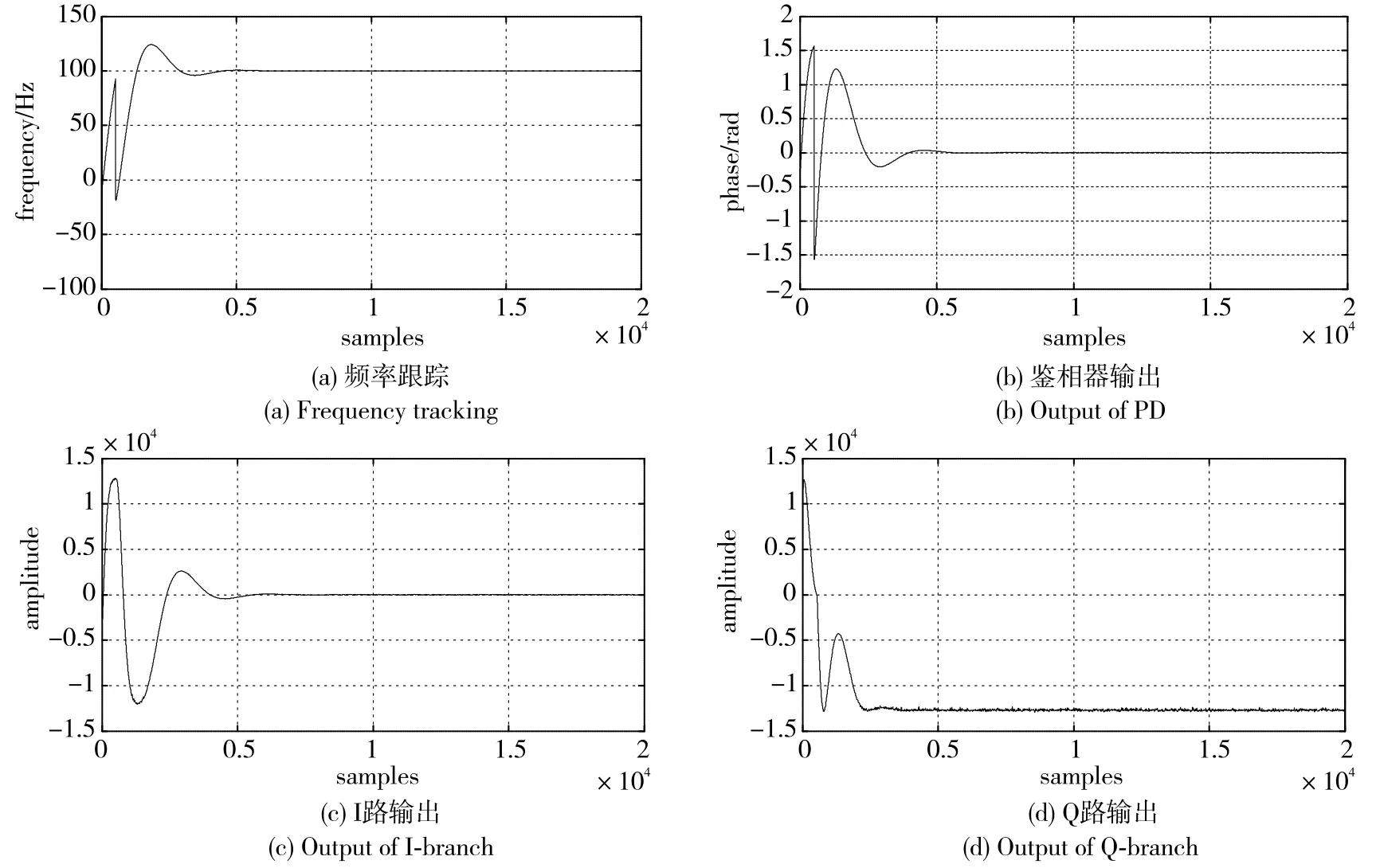
图2 频率跟踪和判决依据输出曲线Fig.2 Frequency tracking and judgement output curves
3 带宽硬切换方法
现役测速雷达带宽一般分档可变,任务中带宽需要变化时,采用带宽硬切换的方法,即直接改变锁相环参数,但会引起环路震荡失锁,导致重捕。环路带宽越小,硬切换导致的震荡失锁越明显。
仿真参数:载波中心频率fc=70MHz,采样频率fs=16.3MHz。
当多普勒频率斜升时,对ωn进行逐级硬切换,频率跟踪和鉴相器输出曲线分别如图3、图4所示。随着信号频率与NCO预置频率差别越来越大,突变之后的ωn越来越小,引起的重捕时间越来越长。
硬切换方法打破现有环路锁定状态,引起重新锁定,会损失很多有效的测速点,当信号频率与NCO预置频率之差足够大时,还要重新进行引导捕获。为了尽可能多地提取出多普勒信息,需要在变带宽过程中保持环路锁定状态。软件锁相环具有很大的灵活性,很容易对带宽变化的方式和时机进行控制,使得在保持环路锁定状态下进行变带宽成为可能。
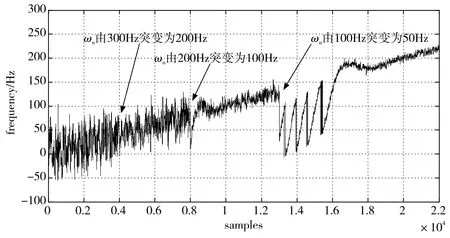
图3 多普勒频率斜升时频率跟踪曲线Fig.3 Frequency tracking curve when Doppler frequency ramps up
4 带宽软切换方法
为解决带宽硬切换造成的重捕问题,本文采用带宽软切换的方法。锁相环每处理一个数据点后,对ωn及环路参数进行更新,用新的参数处理下一个数据点。ωn在变带宽开始和停止时刻存在拐点,环路的稳定状态易受到影响。根据环路参数是否变化步长可以分为定步长和变步长法。
4.1 定步长和变步长法
带宽开始变化和停止变化时刻很容易对环路稳定性造成影响,一般开始变带宽时初始带宽较大,环路稳定状态受影响很小,但带宽停止变化时,带宽已经较小,突然停止变化会扰动环路稳定状态。
ωn线性减小即定步长变化时的频率跟踪曲线和鉴相器输出曲线如图5、图6所示。开始变带宽时,fd输出曲线和鉴相器输出曲线均十分稳定,停止变带宽时刻,鉴相器误差突然增大,fd输出也偏离了真值,这是由于ωn步长相对于ωn越来越大导致的。

图5 定步长法频率跟踪曲线Fig.5 Frequency tracking curve of fixed-step method

图6 定步长法鉴相器输出曲线Fig.6 PD output curve of fixed-step method
为了解决这个问题,本文采用变步长的方法,变化的开始阶段,步长较大,随着ωn越来越小,步长也逐渐减小。
ωn初始值是ωn_ini,变化终值是ωn_fin,变化速度是v,num是变带宽持续的时间,有

离散化后为


当ωn_ini=350Hz,ωn_fin=25Hz,num=65000时,ωn变化曲线和步进曲线如图7所示,步长越来越小。按照这种变化规律进行变带宽仿真,结果如图8、图9所示。

图7 ωn变化及步长曲线Fig.7 ωnand step-length curves
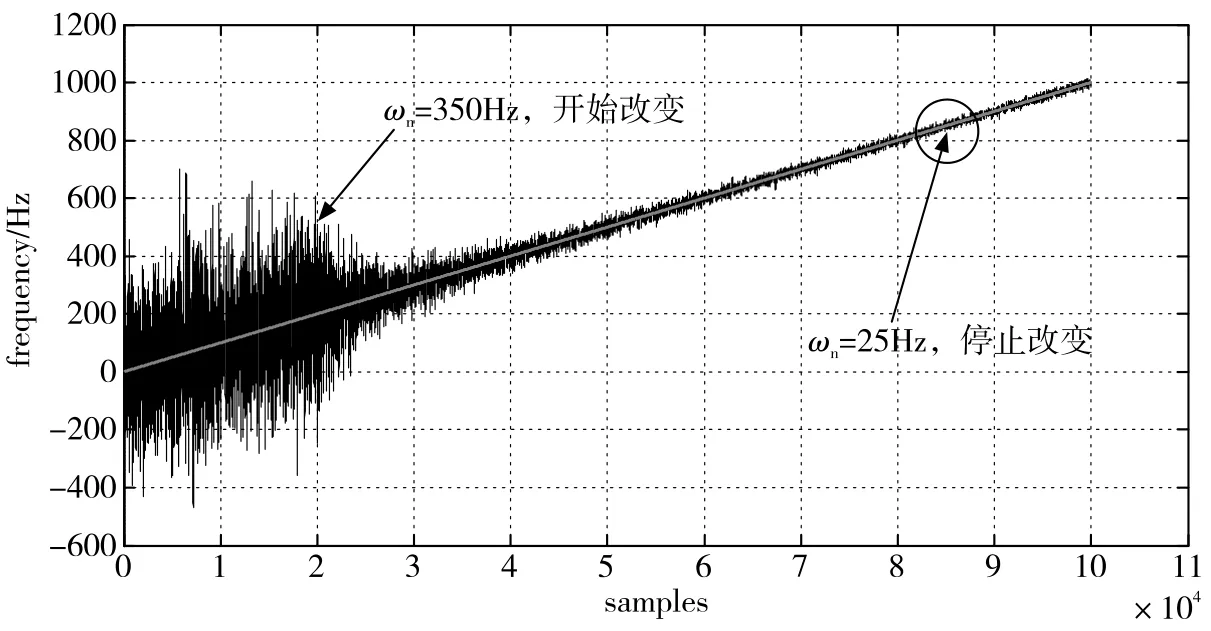
图8 变步长法频率跟踪曲线Fig.8 Frequency tracking curve of variable-step method
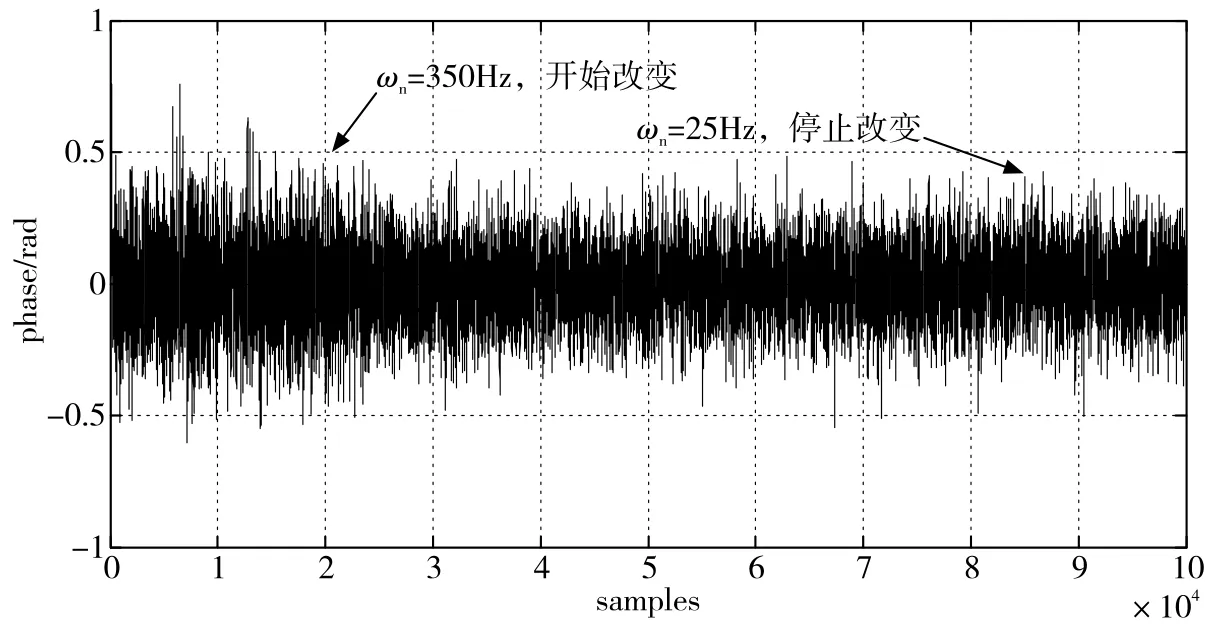
图9 变步长法鉴相器输出曲线Fig.9 PD output curve of variable-step method
对比图5、图6和图8、图9可以看出,采用变步长法后,在带宽变化停止时刻,环路仍然保持稳定状态。变步长法带宽的减小集中在前期,后期主要是ωn的平滑,防止出现大的步进引起环路波动。
4.2 ωn_fin确定准则
为提高测速精度,需尽可能将ωn_fin压窄,但是不能影响环路的正常跟踪,根据1.2节内容,可以从G2支路得到多普勒频率的加速度和加加速度信息,计算出ωn_fin的理论值。
三阶环可以无误差跟踪多普勒频率加速度,但跟踪加加速度时存在固定相位差[5]。环路若要保持跟踪状态,则固定相位差不能超过。由式(6)可得:

环路相位传递动态方程[5]是:

其中,
p
是微分算子,
是环路滤波器传输算子,
如图1所示。
对式(16)进行求解,得到:


一般情况下,mξ=5×0.707,得到:

上面的推导没有考虑到噪声的影响,相位噪声引起相位差围绕真值上下波动,致使ωn_fin比式(19)大。
4.3 变带宽仿真
为验证本文方法可行性,对多普勒频率存在加加速度的情况进行仿真,变步长法和带宽硬切换的频率跟踪曲线分别如图10、图11所示。仿真参数:ωn_ini=350Hz,ωn_fin=35Hz,num=80000,载噪比为54dBHz。
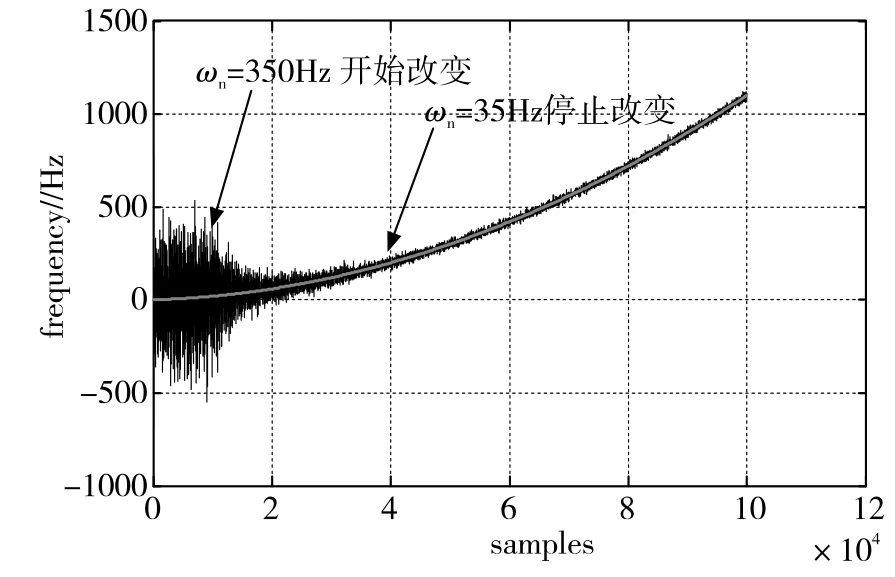
图10 多普勒频率存在加加速度情况下变步长法频率跟踪曲线Fig.10 Frequency tracking curve of variable-step method on jerk condition
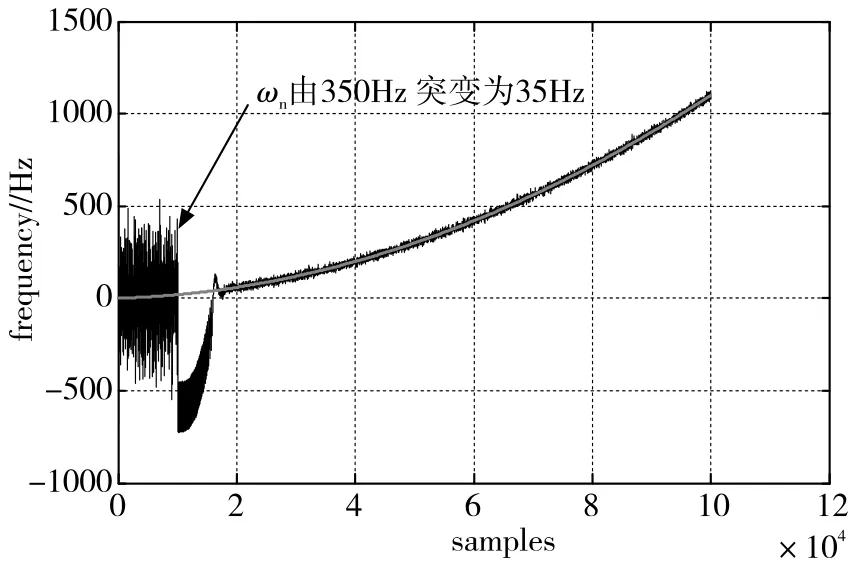
图11 多普勒频率存在加加速度情况下带宽硬切换频率跟踪曲线Fig.11 Frequency tracking curve of hard switching method on jerk condition
对比图10、图11可以看出,ωn由350Hz变化到35Hz,两种方法使用时间基本相同,但是变步长法避免了环路重捕。
5 结束语
本文对三阶软件锁相环变带宽技术进行研究,对G2支路进行线性拟合得到多普勒频率加速度和加加速度。以鉴相器输出为环路稳定的判决依据,采用带宽变步长软切换的方法,在保证环路稳定的前提下,将带宽尽可能压窄,从而获得精度更高的测速数据。该方法避免了带宽硬切换时引起的环路重捕。
[1]郭军海,吴正容.多测速雷达弹道测量体制研究[J].飞行器测控学报,2002,21(3):5~11.Guo Haijun,Wu Zhengrong.Research on Multi-Doppler Radar Ballistic Measurement System[J].Journal of Spacecraft TT&C Technology,2002,21(3):5~11.
[2]Dina M,Abdelhalim Zekry,Mohamed Abouelatta.Speeding-up Phased-locked Loops Based on Adaptive Loop Bandwidth[J].International Journal of Computer Applications,2013,61(3):31~36.
[3]Joonsuk Lee and Beomsup Kim.A Low-Noise Fast-Lock Phased-Locked Loop with Adaptive Bandwidth Control[J].IEEE Journal of Solid-state Circuits,2000,35(8):53~58.
[4]Mark A,Wickert.Phase-Locked Loops with Application[M].ECE Lecture Notes.Portland,2004.
[5]张厥盛,郑继禹,万心平.锁相技术[M].西安:西安电子科技大学出版社,2000:21~25.Zhang Juesheng,Zheng Jiyu,Wan Xinping.Phase Lock Technique[M].Xi’an:Xidian University Press,2000:21~25.
[6]郑君里,应启珩,杨为理.信号与系统[M].北京:高等教育出版社,2000:216~218.Zheng Junli,Ying Qiheng,Yang Weili.Signals and Systems[M].Beijing:Higher Education Press,2000:216~218.
