阵列天线3D-SAR成像及空间分辨率分析
2015-04-20楼良盛
张 昊,楼良盛,房 超
1.信息工程大学,河南 郑州,450001;2.西安测绘研究所,陕西 西安,710054;3.西安电子科技大学,陕西 西安,710054
阵列天线3D-SAR成像及空间分辨率分析
张 昊1,楼良盛2,房 超3
1.信息工程大学,河南 郑州,450001;2.西安测绘研究所,陕西 西安,710054;3.西安电子科技大学,陕西 西安,710054
阵列天线3D-SAR技术是近些年SAR方向发展起来的新技术,通过对获取影像的排列,可直接快速获取地面点在成像坐标系中的三维信息。本文阐述了阵列天线3D-SAR三维距离-多普勒成像原理和该算法基本流程,分析了单发多收模式下阵列天线3D-SAR的空间三维分辨率,给出了该模式下空间分辨率区域划分规律,并采用城区地形进行了仿真回波实验,实验结果验证了成像及划分方法的正确性。
阵列天线;SAR;三维距离-多普勒;三维分辨率
1 前 言
区别于传统光学成像手段,合成孔径雷达(Synthetic Aperture Radar,SAR)具有全天时全天候工作能力的独特优点,并广泛应用于地球遥感、军事侦察、灾情评估及大地测绘等领域。下视阵列天线3D-SAR是基于阵列天线的三维SAR新体制,该体制是在常规SAR成像原理的基础上,通过在机翼方向(跨航向方向)安置阵列天线,获取载机正下方观测区域的地形信息。区别于传统二维成像SAR系统,该体制在方位向、跨航向(常规SAR距离向)及高程向分别基于合成孔径原理、数字波束形成及脉冲压缩获取三个维度的分辨能力。该体制除了具备传统微波测量手段的技术特点外,由于其独特的几何和成像方式,制约着传统SAR的透视收缩、顶底倒置、叠掩等几何失真问题在该项技术中得到很好解决,是SAR技术的一项重要进步。
1999年德国宇航局(DLR)Christoph H. Gierull首次将线性阵列天线引入合成孔径雷达成像。从下视成像(Downward-Looking Imaging)系统模型的提出至今[1],阵列SAR作为SAR领域一个新兴发展方向,其研究一直处于起步阶段,尚无可用于实际生产作业的成熟系统问世。目前欧洲从事基于阵列SAR系统研制的机构有法国ONERA和德国防务研究院高频物理所(FGAN-FHT),上述机构均研制有各自的模型样机[2,3]。2006年,欧洲合成孔径雷达会议(EUSAR 2006)中FGAN-FHT首次公开了其研制的ARTINO(Airborne Radar for Three-dimensional Imaging and Nadir Observation, ARTINO)。该阵列天线3D-SAR系统及其几何示意图如图1所示。在国内,包括中科院电子所和西安电子科技大学在内的几家单位也开展了对该体制SAR相关成像技术的研究。
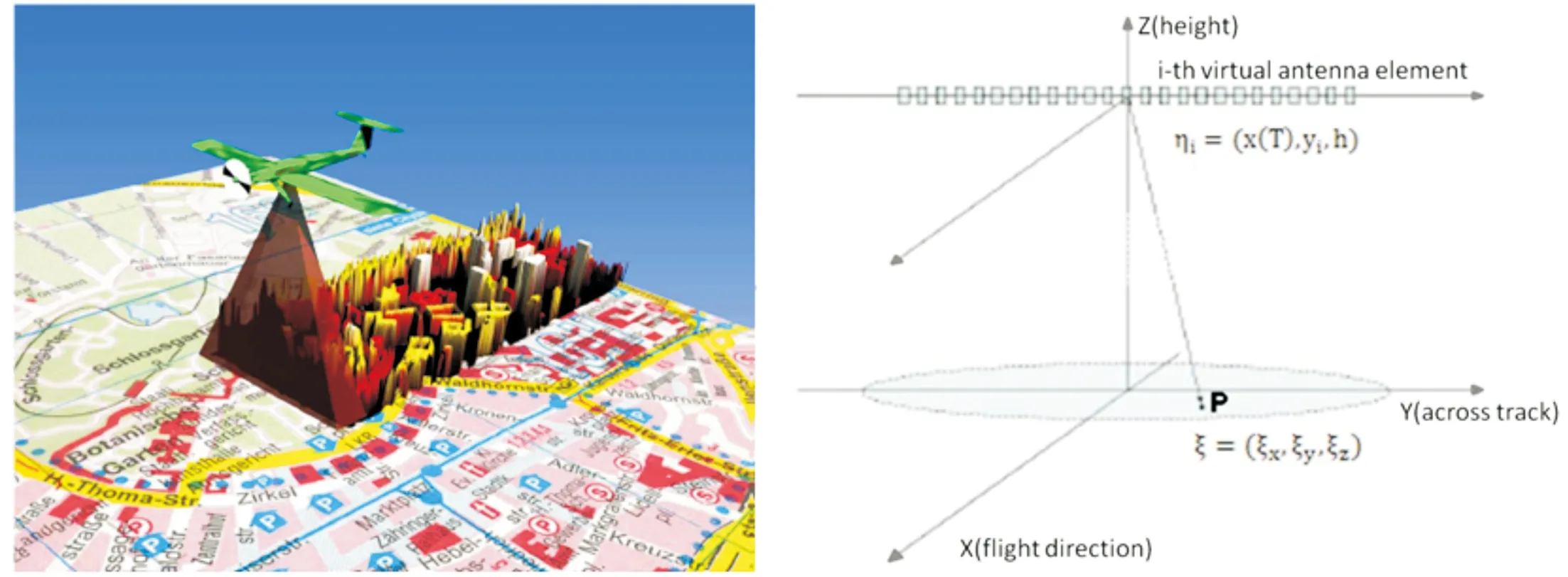
图1 ARTINO阵列天线3D-SAR系统
本文对阵列天线3D-SAR分维成像算法中的三维距离-多普勒(Range-Doppler, R-D)算法进行了研究,分析了单发多收模式下阵列天线3D-SAR的空间三维分辨率,给出了该模式下空间分辨率区域划分规律,并采用城区地形进行了仿真回波实验。实验结果验证了成像及划分方法的正确性,为之后进行阵列点云数据产品生产DEM成果奠定了基础。
2 阵列天线3D-SAR三维R-D成像算法
作为一种新型SAR体制,阵列天线3D-SAR构型模式包括了单发多收(Single-Input and Multiple-Output,SIMO)、双发多收(Dual-Input and Multiple-Output,DIMO)和多发多收(Multiple-Input and Multiple-Output,MIMO)三种,主要区别在于收发天线的数量以及排布方式。以SIMO模式的几何关系为例,如图2所示。

图2 阵列天线3D-SAR几何关系示意图
目前,阵列天线3D-SAR成像算法主要可分为三大类,分别为时域成像算法、频域成像算法以及分维处理算法[4]。其中,分维处理算法是通过将三维空间的时域相关运算分解为三个独立的一维相关,并对每一维进行单独的聚焦成像,具有较高的运算效率;但由于这种运算方法采用了较多近似关系,在聚焦精度上存在一定影响。三维距离-多普勒算法为是一种具有代表性的分维处理算法。
阵列天线3D-SAR的三维距离-多普勒算法的处理流程主要为对单一雷达接收阵元的距离压缩、方位压缩[5]以及针对全部回波数据的波束形成[6]。其中对单一雷达接收阵元进行的距离压缩、方位压缩与常规二维成像处理方法一致。
对于阵列天线3D-SAR,由于成像时不同的发射阵元与接收阵元对应着不同的回波历程,在进行处理时需要进行相关近似以简化处理难度。根据等效相位中心原理,若阵元间基线远小于作用距离,对于收发分置的两根天线,可以等效为在两者连线的中心作自发自收,如图3所示。
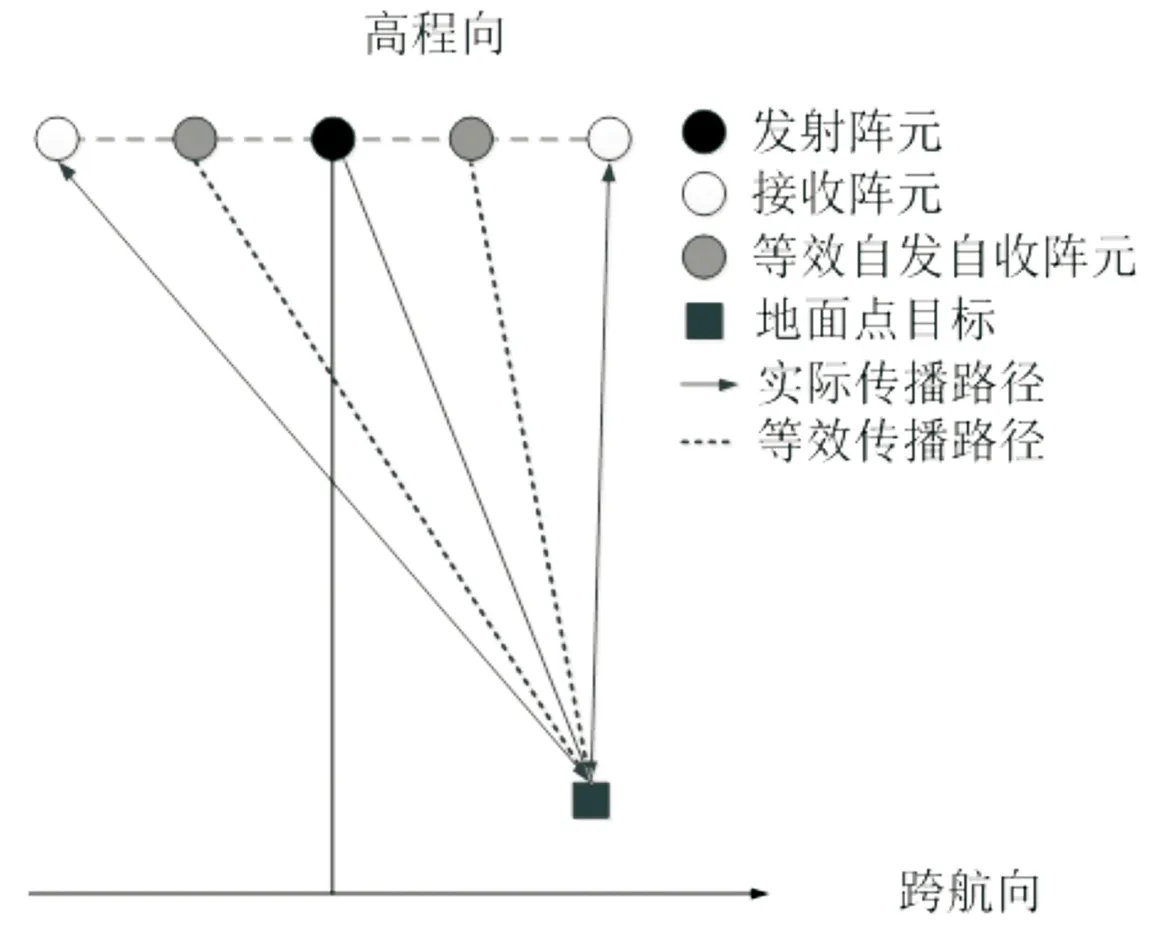
图3 等效相位中心示意图
阵列天线3D-SAR系统符合这种近似条件,采用这种近似后,相应的距离校正量ΔR为
(1)
式中,R1、R2分别为点目标至发射和接收阵元的斜距;RS为等效相位中心至点目标的距离;yn为接收阵元与发射阵元在沿跨航向的距离;R0表示在方位向-高程向点目标与阵元位置的斜距。
在进行成像处理前,由于在数据处理时采用了等效相位中心近似,在此处需要补偿一个相位常数,该常数主要由工作波长λ、阵元间距yn与方位向-高程向斜距R0决定。设雷达接收信号为s(t),补偿后的信号为s1(t),具体补偿过程为:
(2)
之后对回波信号距离压缩。由于雷达每一天线的各个点目标的回波实际上是分散于各个分辨单元的,因此需要用距离压缩在距离向上找出信号的目标双曲线。
设点目标至飞行航线的最近斜距为RB,以相应慢时间时刻为时间原点tm,则在任一时刻tm,雷达天线相位中心至P的斜距可表示为R(tm,RB),其中RB为涉及距离徙动改正的常数项。
雷达回波信号可表示为:
(3)

(4)
具体实现时首先将信号转至距离频率-方位时间域,与卷积核相乘后进行傅里叶逆变换,转换回距离时间-方位时间域,相应的计算过程可以表述为:
(5)
完成距离压缩后,由于阵元与目标点在传播过程中的斜距变化,使得影像在距离向和方位向存在二维耦合,需要通过距离徙动校正将其恢复为沿方位向的一条直线。
(6)
具体实现时将信号转至距离频域-方位频域,信号与滤波器相乘后做距离向、方位向傅里叶逆变换,完成距离徙动校正。
在进行距离徙动校正后,点目标的回波能量在距离向已经聚焦完毕,通过对该信号的匹配滤波,将在方位向分散的点目标能量聚焦成窄脉冲,达到对点目标的二维精确定位。
进行方位压缩时,相应的距离快时间-方位慢时间域的信号可以表述为:
(7)
方位向匹配滤波的系统函数可以表示为:
(8)
具体实现时将原始信号进行方位向傅里叶变换,乘以卷积核,再做傅里叶逆变换将信号转回时间域,完成方位压缩。相应的计算过程可以表述为:
(9)
在传统二维SAR成像基础上,结合波束形成技术实现在第三维的分辨能力。
波束形成在阵列成像中主要包括跨航向相位校正和角度维压缩两个步骤。由于目标点对于不同接收阵元的斜距存在差异,需要依托相应几何关系对不同阵元接收的数据进行补偿,在距离向-方位向-跨航向三维数据矩阵中的跨航向方向将同名点校正为一条直线。由于阵列长度远小于相应斜距,可近似认为每个阵元对单个点目标的回波的接收角度一致,通过波束形成原理对所有回波在各角度方向进行加权累加完成角度维压缩,转换为方位向-斜距向-偏向角度的三维数据,将三维数据进行插值,得到目标区域的方位向-距离向-高程向三维模型。完成对回波数据的距离压缩、距离徙动校正和方位压缩处理后,信号可记为:
(10)
其中,pa和pr分别为方位向和距离向的点目标P(X,Y,Z)的扩展函数;RiB为点目标P到第i个阵元的最短斜距;R0B为点目标P到中心阵元的最短斜距;θ为点目标P相对于中心阵元的侧偏角;θ0为初始侧视角;d为阵元间距;A表示信号的幅度信息。基于余弦定理对RiB进行省略小项的约化,补偿相应阵元偏移引起的相位项,可以得到
RiB≈R0B-id·sinθ
(11)
完成跨航向相位项补偿后,并对补偿后的信号进行角度维压缩,有
(12)
其中,pθ为角度维点的目标扩展函数。
具体运算过程为,将按阵元排列的斜距向-方位向-跨航向三维数据集合进行跨航向傅里叶变换,乘以跨航向校正卷积核,再做傅里叶逆变换将信号转换回斜距向-方位向-跨航向时域三维数据集合,设定不同θ并进行分角度累加,完成在极坐标系下的聚焦成像。
之后可依据需要,将成像于以发射阵元初始位置为原点、方位向为平面坐标、高程向和跨航向为极坐标的柱面坐标系下的点云数据转换至相应地面辅助坐标系。
3 阵列天线3D-SAR空间分辨率分析
区别于传统二维SAR成像后的单视复数影像数据,阵列天线3D-SAR除了具有距离向(二维斜距向)和方位向分辨率外,在高程上也拥有分辨能力,最终数据成果形式与目前LiDAR系统更为类似。但本质上讲,阵列天线3D-SAR的各向分辨率是由各个维度的波数带宽决定的[8]。
在方位向上,阵列天线3D-SAR与传统的机载SAR系统同为利用合成孔径技术获取该向的分辨能力。这向分辨率与发射天线的方位向尺寸有关,而与具体的构型模式选择无关,相应的分辨率公式为:
(13)
式中,da为发射天线的方位向尺寸。
在距离向上,不同构型间的理论分辨能力差异,主要与接收阵元和发射阵元构成的等效阵列天线长度有关,其余影响因素主要包括信号波长λ和航高H。其中,SIMO模式下分辨率公式为:
(14)

在高程向上,阵列下视3D-SAR的理论分辨率可以认为是传统的SAR系统将发射的信号进行脉冲压缩后,获取的距离向分辨率投影至高程向得到的,主要与发射信号的带宽B及目标角θ所决定,与具体构型无关。其高程向分辨率公式为
(15)
其中,c为光速。由于目标波束方向与正下视方向夹角较小,其余弦值可以近似为1,该式缩写为:
(16)
综上,对于阵列天线3D-SAR,在方位向上,其成像原理及其分辨率特性与常规SAR成像模式相同;距离向则与常规SAR成像模式有本质区别,除了不同构型间的差异,若要追求高分辨能力,需要增加线阵天线的长度,或降低平台的航高;对于高程向分辨则主要基于脉冲压缩技术实现,其分辨率依赖信号的带宽。基于上述分析,对于单航过阵列天线3D-SAR成像系统,可以在距离向和高程向将点云等分辨率区间进行如下划分,为后续DEM生产精度评定提供支撑。
在距离向上,由式(16)进行划算后可得:
(17)
式中,H为航高;L为阵列长度;λ为波长;(yi,zi)为跨航向-高程向目标点空间坐标位置;σ为理论成像分辨率。通过该式,可以将阵列天线3D-SAR单发多收成像模式在距离向上的精度能力进行划分。每当给定一个理论成像分辨率值,即能得到相应的距离分辨精度区间。
在高程向上,同理可得到:
(18)
式中,θi为相应目标点偏角;B为发射信号带宽;σ为理论成像分辨率。通过该式,可以将阵列天线3D-SAR单发多收成像模式在高程向上的精度能力进行划分,每当给定一个理论成像分辨率值,即能得到相应的高程分辨精度区间。
对于阵列天线3D-SAR来说,若使用无人机作为系统工作平台,工作频率定为Ka波段的37.5GHz,系统航高定为1km,阵列长度按无人机翼展4m计算,则其距离向理论分辨率为2m。对于高程向,当机载系统信号带宽为200MHz、目标角变化为正负15°时,相对应的理论高程向分辨率的极限值(机下点值)为0.75m,并在距离向正负200m处、高程差为100m时依然可以保证优于0.775m。根据上述参数,阵列成果精度能力如图4所示。
图a中标示1.7至2的四条曲线为距离向等分辨率曲线,图b中0.78与0.84间四条直线为高程向等分辨率曲线。
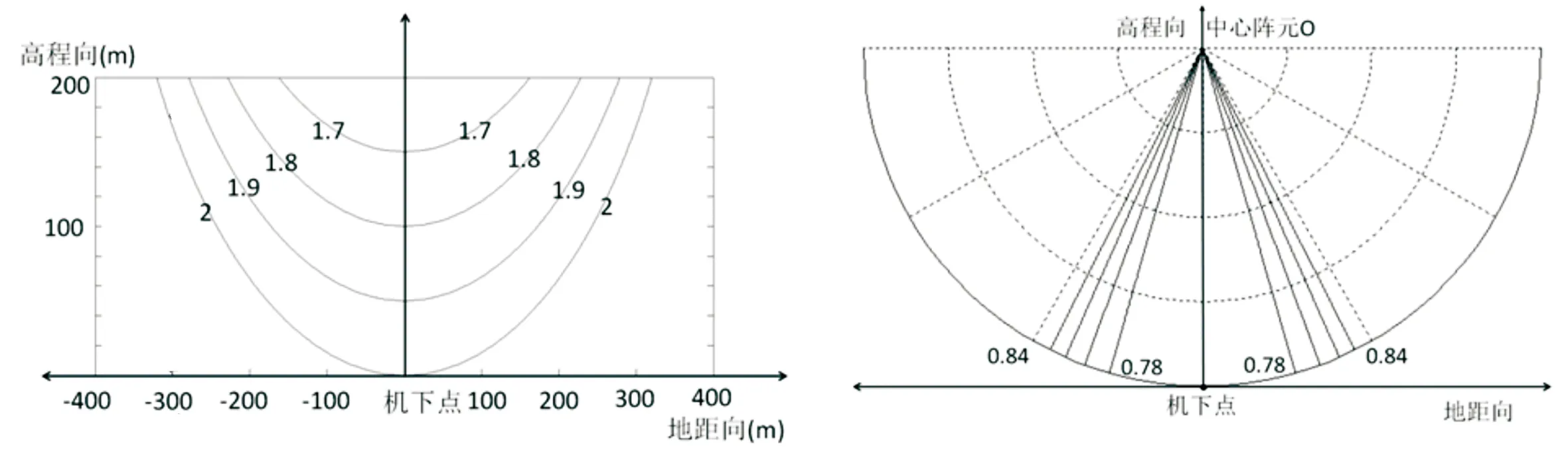
(a)距离向等分辨率区间划分示意图 (b)高程向等分辨率区间划分示意图
4 阵列天线3D-SAR SIMO构型成像实验
本文基于SIMO模式,进行了仿真建筑物场景的三维距离-多普勒成像实验。为照顾贴近真实城市地表情况,在原始回波场景设计了如图5所示的含建筑物区域,区域范围为200m×200m,包含三栋高度为30m的仿真建筑物,其中一栋设置为L字型。仿真实验参数见表1,三维成像后得到的重建场景点云拟合平面后,效果如图6所示。
表1 载机系统仿真实验参数

雷达高度200m阵元数21个天线长度2m最大观测角10°发射脉冲载频9.6e9Hz脉冲发射重复频率150Hz

图5 原始场景布设示意图
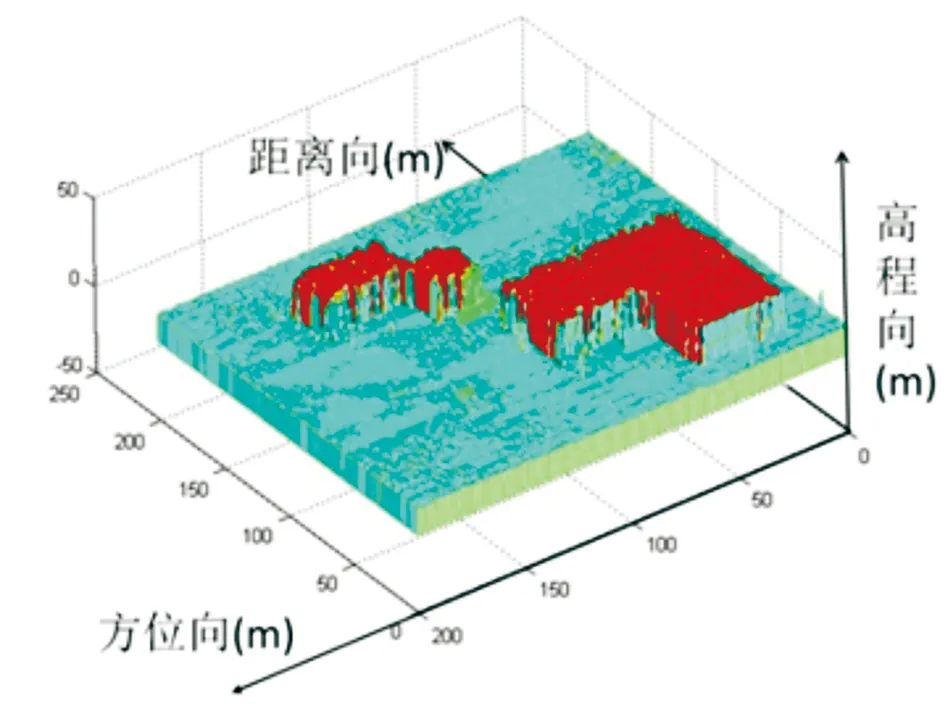
图6 仿真回波成像效果图

图7 仿真成像二维对比图
图8 仿真回波成像方位向视角楼顶截图
由仿真结果可以看出,经过分维处理后的三维回波重建,生成的建筑物群对原始仿真场景进行了较好的恢复,证明了该种算法的有效性。成像效果高程对比如图7所示,图中红色区域表示成像后图中低于原始场景的部分,蓝色区域表示成像后图中高于原始场景的部分。另如图8所示,沿方位向视角观察粗差点表现较为明显,楼顶成像结果在距离向和高程向呈扇面排布,该种排布规律佐证了前文分辨率划分方法的正确性。
由于实验采用单航过推扫式成像,且未对成像点云进行相应滤波优化处理,因此成像效果有待进一步优化。在后续研究中,考虑将沿不同方向对建筑物进行重复航过观察,或将交轨获取的点云数据进行融合筛选,加之对成像点云结果辅以相应的滤波处理剔除粗差点,应当可以有效改善整体成像质量与精度。
5 结束语
阵列天线3D-SAR由于其独特的三维成像方式,在城区、山谷等地表高程变化剧烈的区域具备了成像的潜力,有着广泛的应用前景。从1999年德宇航DLR首次将线性阵列天线引入SAR成像、提出下视成像系统模型至今,技术体制的不成熟一直制约着这项技术投入测绘领域发挥其应有价值。本文对阵列天线3D-SAR分维成像算法进行了研究,分析了该种成像模式的空间分辨率,给出了依据不同理论分辨率对成像区间的划分方法,并通过仿真数据对模拟场景进行了重建,为之后进行阵列点云数据产品生产DEM成果奠定了基础。
[1]ChristophH.G.Onaconceptforanairbornedownward-lookingimagingradar[J].AEU, 1999(6):295-304.
[2]GiretR,JeulandH,EnertP.AStudyofa3D-SARconceptforamillimeterwaveimagingradaronboardanUAV[C].RadarConference, 2004.EURAD.FirstEuropean.IEEE, 2004: 201-204.
[3]GiretR,JeulandH,EnertP.AStudyofa3D-SARconceptforamillimeterwaveimagingradaronboardanUAV[C].RadarConference, 2004.EURAD.FirstEuropean.IEEE, 2004: 201-204.
[4]王银波. 新型阵列三维SAR关键技术研究[D].西安:西安电子科技大学,2009.
[5]IanG.Cumming(著),洪文等(译).合成孔径雷达成像——算法与实现[M] . 北京:电子工业出版社,2012.
[6]徐有栓.高分辨三维合成孔径雷达成像技术[D]. 西安:西安电子科技大学,2011.
[7]廖桂生.阵列信号处理[OL].[2011-04-07].Http://download.csdn.net/detail/muyiyangmei/2653134.
[8]杜磊. 阵列天线下视合成孔径雷达3维成像模型、方法与实验研究[D].北京:中国科学院电子学研究所, 2010.
Imaging and Spatial Resolution Analysis of Array Antennas 3D-SAR
Zhang Hao1, Lou Liangsheng2,Fang Chao3
1. Information Engineering University, Zhengzhou 450001, China 2. Xi’an Research Institute of Surveying and Mapping, Xi’an 710054, China 3. Xidian University, Xi’an 710000, China
Array antennas 3D-SAR( three-dimensional imaging synthetic aperture radar) technology is a new one developed in recent years. It can directly and quickly obtain 3D information of ground points in the imaging coordinate system. This paper states the basic imaging principle and processing flow of array antennas 3D-SAR Ranger-Doppler, analyzes the spatial resolution of 3D-SAR under the single-input and multiple-output mode, proposes the dividing regularity of 3D-SAR spatial resolution and conducts a simulation echo experiment based on the urban area. The experiment results prove that the imaging algorithm and distribution are correct.
array antennas; SAR; 3D Range-Doppler; 3D resolution
2015-05-13。
国家自然科学基金资助项目(41371439)。
张昊(1989—),男,硕士研究生,主要从事阵列天线3D-SAR方面研究。
P
A
