BDS/GPS联合动态差分定位
2015-04-20秦显平曾安敏
秦显平,曾安敏
1.西安测绘研究所,陕西 西安,710054;2.地理信息工程国家重点实验室,陕西 西安,710054
BDS/GPS联合动态差分定位
秦显平1,2,曾安敏1,2
1.西安测绘研究所,陕西 西安,710054;2.地理信息工程国家重点实验室,陕西 西安,710054
本文研究了BDS/GPS联合动态差分定位方法,指出在采用广播星历时需注意BDS与GPS的椭球参数不同及星历计算方法不同,提出采用公共位置参数分别计算BDS与GPS接收机钟差以消除两个系统间的时间误差。分析了不同权比对BDS/GPS联合动态差分定位的影响,指出由于差分定位减小了导航星历等系统性误差的影响,因此权值对联合定位的结果影响较小。静态站实测数据计算结果表明:BDS/GPS联合动态定位精度优于单GPS系统的定位精度,并且随着基线长度的增加,精度提高更加明显。机载实测数据计算结果表明:BDS/GPS联合动态差分定位无论在定位有效个数还是在精度上都好于单GPS系统和单BDS系统,动态定位精度优于10厘米。
动态相对定位;GPS;BDS
1 前 言
作为国际大地测量学研究的热门课题,GNSS动态差分定位不仅可以提供快速的大地测量定位,而且能够为航空重力以及航空摄影测量提供准确的平台信息。长期以来,基于GNSS的高精度测量主要依靠GPS,随着GLONASS、BDS、Galileo的发展,卫星导航应用正在由单一GPS时代进入多个卫星导航系统兼容并存的时代[1-3]。
北斗卫星导航系统于2012年12月27日对外宣布正式提供区域服务,2020年左右将全面建成北斗卫星导航系统,形成全球服务能力[1],其定位、导航和授时(PNT)服务性能已基本达到或超过设计性能指标[3]。北斗导航系统与GPS和GLONASS卫星导航系统相比,增加了IGSO和GEO两种卫星,增强了对亚太区域的导航和定位[10]。由于多卫星导航系统联合定位可以提高模糊度解算的固定率和可靠性[9],提高相对定位精度[11],因此多位学者开展了BDS与GPS联合定位方面的研究[8,9,11]。
本文主要研究BDS与GPS的联合动态差分定位,分析了BDS与GPS的不同之处,指出在采用广播星历时需注意BDS与GPS的椭球参数不同及星历计算方法不同,提出采用公共位置参数分别计算BDS与GPS接收机钟差以消除两个系统间的时间误差。最后,分别采用静态站和机载数据对BDS/GPS联合动态差分定位进行了计算分析。
2 BDS与GPS的差异
与均匀分布在6个倾角轨道面上的GPS星座不同,北斗区域卫星导航系统由14 颗卫星组成, 包括5 颗GEO 卫星, 5 颗倾斜地球同步轨道(Inclined Geosynchronous Orbit, IGSO)卫星和4 颗中圆地球轨道(Medium Earth Orbit, MEO)卫星。与GPS卫星发播的三个频率无线电信号不同,北斗区域卫星导航系统发播的三个导航信号频率分别为1561.098 MHz(B1), 1207.14 MHz(B2)和1268.52MHz(B3)[1]。
GPS系统采用专门的时间系统GPS时GPST,其原点为1980年1月6日的UTC零点。北斗时间系统BDT的原点为2006年1月1日的UTC零点。因此,BDT与GPST除了相差1356周外,还始终保持一个14秒的系统差;除了上述差异外,还存在一个秒以下的系统性偏差。

3 联合定位观测方程
与单GPS系统的动态差分定位参数估计算法相同,BDS/GPS联合动态差分定位采用扩展卡尔曼滤波算法,模糊度解算采用宽窄巷组合技术,固定模糊度后采用无电离层组合观测量计算位置参数。联合定位与单GPS定位算法的最大不同体现在观测方程上,BDS/GPS联合定位观测方程为:
上述双差观测方程虽然不含接收机钟差,但是,在数据预处理时,为消除BDS与GPS系统秒以下的系统性偏差,文章采用公共位置参数计算BDS与GPS各自测站钟差,这样不仅可以消除时间系统偏差,而且由于采用了公共位置参数,还可以使位置参数与两个卫星导航系统的坐标系统有机融合在一起。
4 静态站的动态差分结果
数据采集时间为2012年6月18,接收机为BDS/GPS兼容双频双模接收机,此时对应北斗4GEO+5IGSO星座(C01、C03、C04、C05、C06、C07、C08、C09、C10)。数据采样率为30秒,动态定位试验时,将西安站作为基准站,动态站分别选
择临潼、成都和上海三站。各基线向量长度从30km到1200km,原有的站坐标已知,为定位精度检核提供了条件。表1给出了各基线的长度,表2给出了不同基线长的动态差分定位结果统计值。
表1 试验基线长度
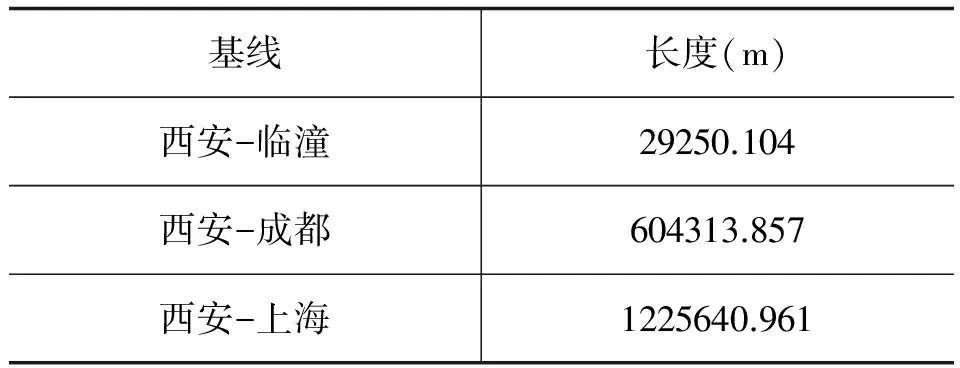
基线长度(m)西安-临潼29250.104西安-成都604313.857西安-上海1225640.961
表2 不同基线长的动态差分定位结果统计值
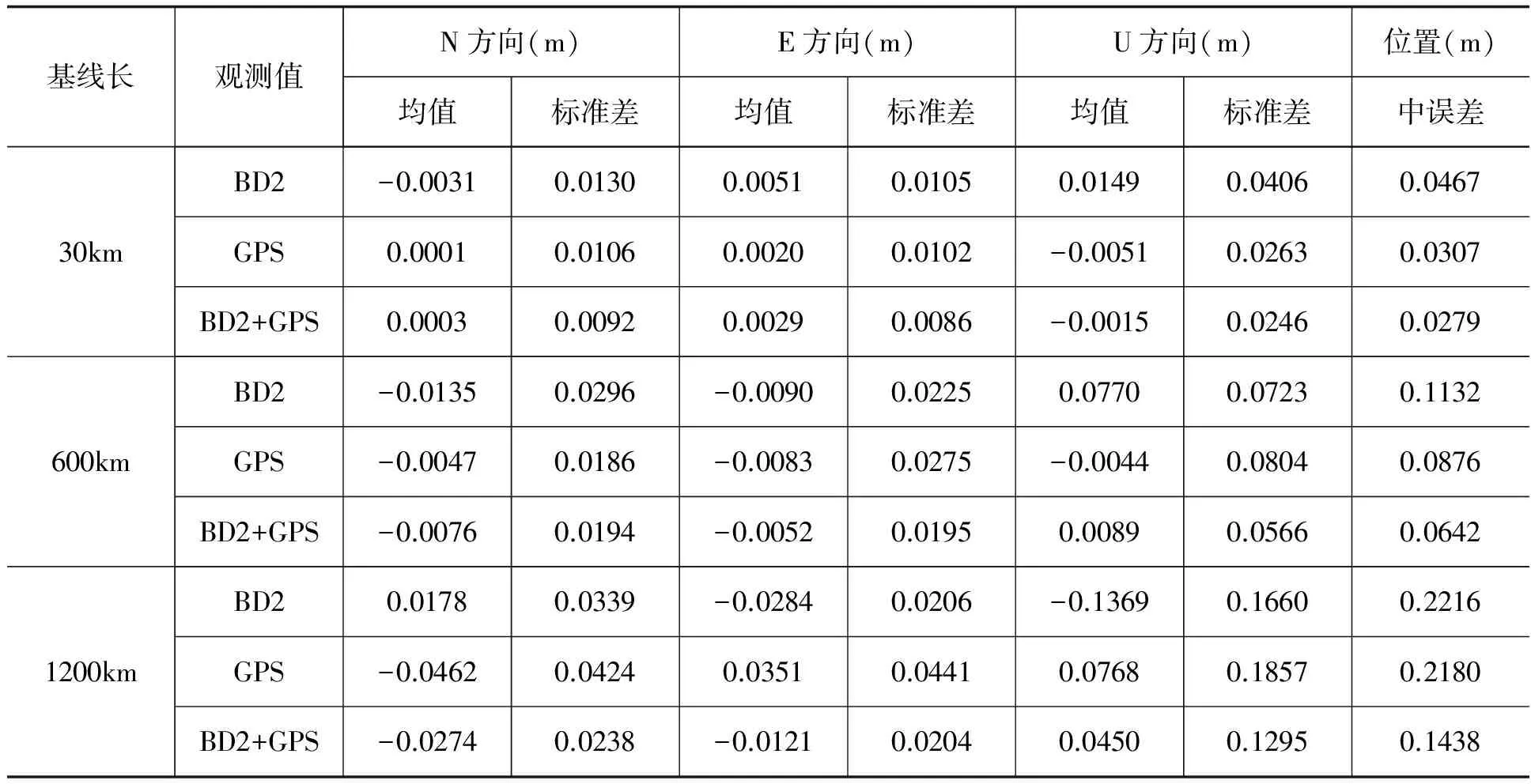
基线长观测值N方向(m)E方向(m)U方向(m)位置(m)均值标准差均值标准差均值标准差中误差30kmBD2-0.00310.01300.00510.01050.01490.04060.0467GPS0.00010.01060.00200.0102-0.00510.02630.0307BD2+GPS0.00030.00920.00290.0086-0.00150.02460.0279600kmBD2-0.01350.0296-0.00900.02250.07700.07230.1132GPS-0.00470.0186-0.00830.0275-0.00440.08040.0876BD2+GPS-0.00760.0194-0.00520.01950.00890.05660.06421200kmBD20.01780.0339-0.02840.0206-0.13690.16600.2216GPS-0.04620.04240.03510.04410.07680.18570.2180BD2+GPS-0.02740.0238-0.01210.02040.04500.12950.1438
比较不同长度基线的动态定位结果可以发现:(1)BDS+GPS定位精度优于单GPS或单BDS的定位精度,并且随着基线长度的增加,BDS+GPS联合定位的精度优势更加明显。(2)在N方向和E方向,BDS与GPS的动态差分定位结果基本相当;在U方向,BDS的动态差分定位存在一个系统性偏差,这个系统性偏差值随着基线长度的增加而增加。这可能是由于北斗区域星座的GEO卫星相对地面点基本不动,其观测值对高程分量约束较弱而造成的。(3)在1200km基线的解算中,BDS与GPS的定位结果存在系统性偏差,可能是基线距离较长,高差较大,两站误差相关性较小的缘故。
由于GPS与BDS的导航星历精度不同,观测数据噪声也不同,为分析这些不同对联合动态差分定位结果的影响,文章在联合动态定位中分别对GPS和BDS赋予不同的权比进行试验计算,试验基线为西安-临潼。表3给出了不同权比的联合定位结果统计值。从表3可以看出,不同权比的联合定位结果相差不大,这是由于采用差分定位后,减小了导航星历等系统性误差的影响。
表3 不同权比的联合定位结果
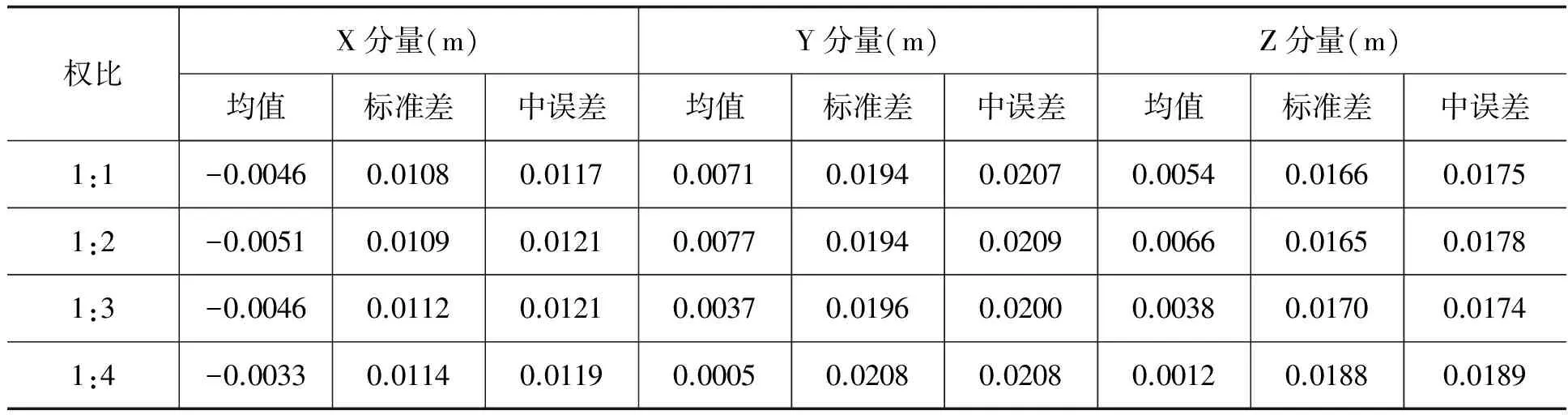
权比X分量(m)Y分量(m)Z分量(m)均值标准差中误差均值标准差中误差均值标准差中误差1:1-0.00460.01080.01170.00710.01940.02070.00540.01660.01751:2-0.00510.01090.01210.00770.01940.02090.00660.01650.01781:3-0.00460.01120.01210.00370.01960.02000.00380.01700.01741:4-0.00330.01140.01190.00050.02080.02080.00120.01880.0189
5 机载动态差分结果
无人机动态试验采用BDS/GPS兼容双频双模接收机,数据采集时间为2013年9月25日,观测弧段内BDS仅有C01、C02、C03、C04、C05、C06、C08、C09,数据采样率为0.1秒,共有30343个观测历元。图1为利用差分定位结果得到的飞机地面轨迹和高程变化图。

图1 无人机飞机地面轨迹和高程变化图
为检验机载动态计算精度,文章采用GrafNav软件计算的动态结果作为标准进行检核,GrafNav软件结果采用质量因子Q进行评估, 其中Q=2时的定位精度为0.05~0.4m。表4给出了无人机动态差分定位结果统计值(Q<3)。由表4可以看出,在机载动态定位中,BDS+GPS定位无论是在有效个数还是在定位精度上都稍优于GPS定位结果,GPS和BDS+GPS的动态定位精度都优于10.0cm。
表4 无人机动态差分定位结果统计值(Q<3)
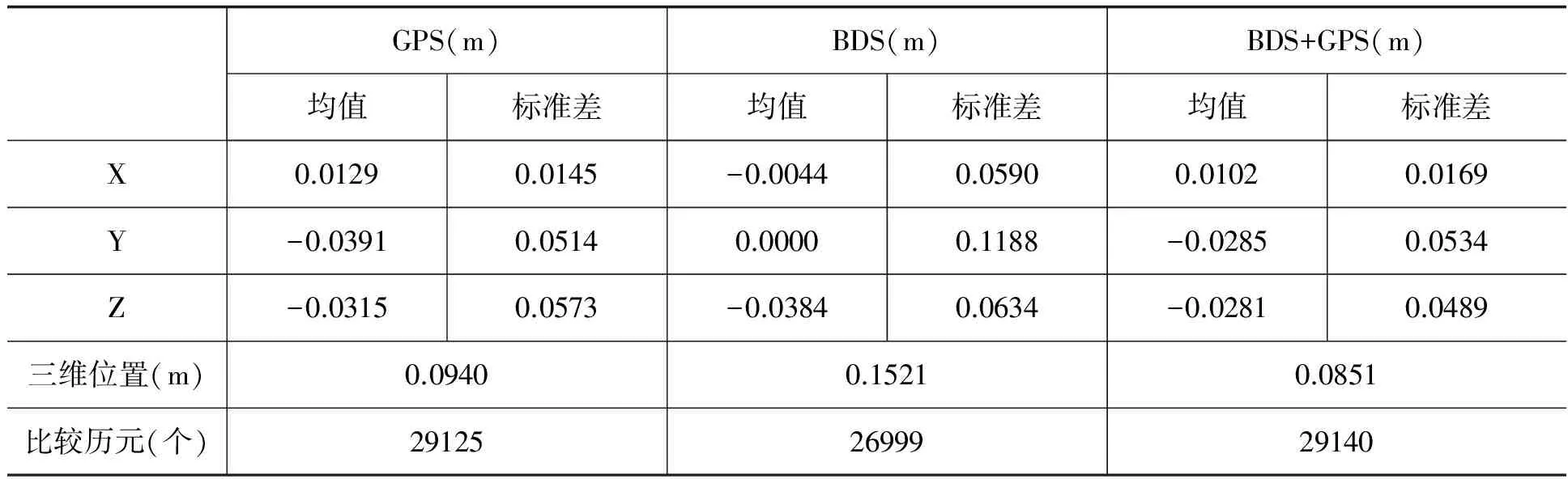
GPS(m)BDS(m)BDS+GPS(m)均值标准差均值标准差均值标准差X0.01290.0145-0.00440.05900.01020.0169Y-0.03910.05140.00000.1188-0.02850.0534Z-0.03150.0573-0.03840.0634-0.02810.0489三维位置(m)0.09400.15210.0851比较历元(个)291252699929140
图2为机载接收机GEO01卫星MW组合观测值及电离层残差观测值的变化情况,其他GEO卫星的观测值变化情况与GEO01卫星相似。从图2可以看出,机载接收机GEO01卫星的观测质量较差。初步分析认为,机载接收机的GEO卫星观测数据质量差是造成BDS动态差分定位结果不好的主要原因。
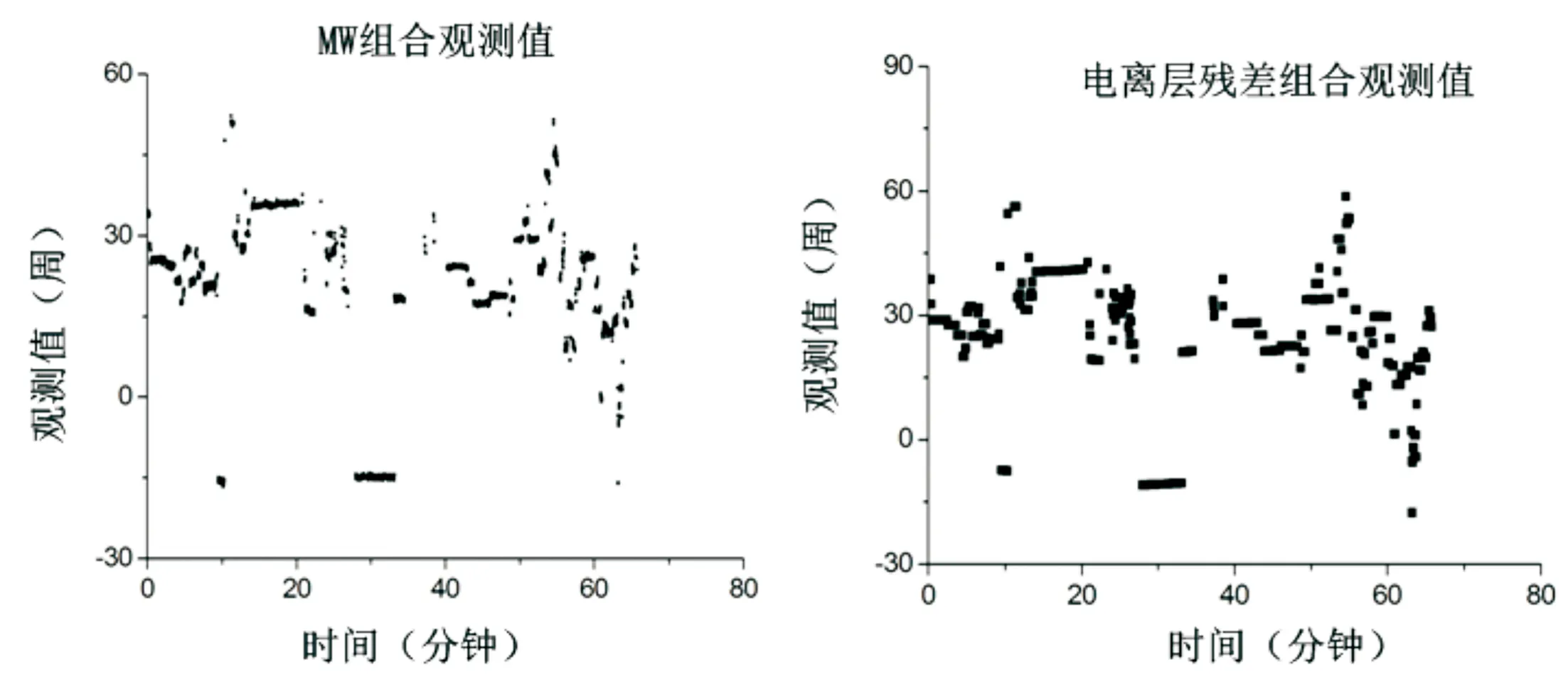
图2 机载接收机GEO01卫星观测值变化情况
6 结 论
BDS/GPS联合动态差分定位无论在定位有效个数、还是精度上都好于单GPS系统和单BDS系统,动态定位精度优于10cm。随着基线长度的增加,BDS/GPS联合动态差分定位的精度优势更加明显。
[1]杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J]. 测绘学报,2010,39(1):1-6.
[2]Yang Yuanxi, Li Jinlong, WANG Aibing et al. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system[J].Science China: Earth Sciences,2014,57(1):144-152.
[3]杨元喜,李金龙,王爱兵等. 北斗区域卫星导航系统基本导航定位性能初步评估[J], 中国科学: 地球科学, 2014,44(1):72-81.
[4]中国卫星导航系统管理办公室.北斗卫星导航系统空间信号接口控制文件(测试版)[EB].[2011-12-30].http://wenku.baidu.com/
[5]Global Positioning System Directorate. Global Positioning System Directorate System Engineering & Integration Interface Specification (IS-GPS-200F) - Navistar GPS Space Segment/Navigation User Interface[EB]. [2011-9-11].http://www.docin.com/
[6]许其凤. 空间大地测量学-卫星导航与精密定位[M]. 北京: 解放军出版社, 2001.
[7]EUROCONTROL(European Organization for the Safety of Air Navigation Brussels, Belgium) and IfEN(Institute of Geodesy and Navigation University FAF Munich, Germany).WGS 84 Implementation Manual Version 2.4[EB].[1998-2-12].http://www.docin.com/
[8]何海波,李金龙,郭海荣等. 北斗/GPS双系统单频RTK模糊度解算性能分析[J].测绘科学与工程, 2014,34(1):50-54.
[9]高星伟,过静珺,程鹏飞等. 基于时空系统统一的北斗与GPS融合定位[J].测绘学报,2012,41(5):743-748.
[10]王胜利,王庆,杨徉等.北斗IGSO/GEO/MEO卫星联合高精度定位方法[J]. 中国惯性技术学报,2013,21(6):792-796.
[11]王利,张勤,范丽红等.北斗/GPS 融合静态相对定位用于高精度地面沉降监测的试验与结果分析[J].工程地质学报,2015,23(1):119-125.
Kinematic Differential Positioning with Combination of BDS and GPS
Qin Xianping1, 2,Zeng Anmin1, 2
1. Xi’an Research Institute of Surveying and Mapping, Xi’an 710054, China 2. State Key Laboratory of Geo-information Engineering, Xi’an 710054, China
This paper studies the method of kinematic differential positioning with combination of BDS and GPS data. Firstly, the paper points out that the ellipsoid parameter and the broadcast ephemeris algorithm of BDS and GPS are different when using broadcast ephemeris. Then the paper discusses the receiver clock error of BDS and GPS according to the common position parameters to eliminate the time errors produced by the differences of BDS and GPS. Finally it analyzes the influence of various weight ratios on the kinematic differential positioning with combination of BDS and GPS. The results show that the position accuracy of BDS/GPS is higher than that of single GPS, and it improves significantly with the increase of baseline length. The results from airplane testing show that the kinematic differential positioning with combination of BDS/GPS are better than those of single GPS and single BDS and the accuracy of kinematic differential positioning is better than 10cm.
kinematic relative positioning; GPS (Global Positioning System);BDS
2015-04-16。
国家自然科学基金资助项目(41274040,41374019,41474015)。
秦显平(1974—),男,副研究员,主要从事卫星定轨及GNSS数据处理研究。
P228
A