无轴轮缘推进系统的研究现状与展望*
2015-04-19谈微中严新平刘正林黄千稳
谈微中 严新平 刘正林 张 聪 黄千稳 田 哲
(武汉理工大学能源与动力工程学院1) 武汉 430063) (国家水运安全工程技术研究中心可靠性工程研究所2) 武汉 430063) (船舶动力工程技术交通行业重点实验室3) 武汉 430063)
无轴轮缘推进系统的研究现状与展望*
谈微中1,2,3)严新平1,2,3)刘正林1)张 聪1,2,3)黄千稳1,2,3)田 哲1,2,3)
(武汉理工大学能源与动力工程学院1)武汉 430063) (国家水运安全工程技术研究中心可靠性工程研究所2)武汉 430063) (船舶动力工程技术交通行业重点实验室3)武汉 430063)
无轴轮缘推进系统是近年来提出并发展的一种全新的船舶推进方式,它打破了常规的思维方式和推进模式,将电机与推进器集成一体,有效地减少了推进系统占用的船舱,提高了空间利用率,增加了船舶的推进效率,减少了振动与噪声,保证了舰船的隐蔽性.在军事和民用领域都具有极高的应用价值和广阔的市场前景.在介绍无轴轮缘推进系统的基本原理和结构,以及发展现状和关键性技术的基础上,总结了无轴推进系统的主要特点和发展前景.
无轴推进;轮缘驱动;推进系统;船舶动力
0 引 言
近年来,随着世界各国之间贸易的加强,海上货运量增加,船舶数量、吨位也随之提升.但随着船舶大型化的发展,传统船舶推进系统已经逐渐显现出它的劣势,无法更好地满足工作要求.在传统推进系统中,主机、推进轴系、螺旋桨等是不可或缺的装置.而随着主机单机功率的增大,其体积也随之增大,推进轴系长度更是增至几十米甚至百米,部分船舱被占用,导致空间利用率低下.同时,由于推进轴系长度的增加,结构日趋复杂,在能量传递过程中损耗增大,传递效率降低,增加了船舶的设计难度和建造成本.这些缺陷导致人们逐渐将目光转向更加先进的无轴推进系统[1-2].
无轴推进系统是指无需穿透船体的推进装置,其在全电力推进系统的基础上进行创新,采用有别于现有电力推进系统的结构设计,避免了吊舱式、全回转式等电力推进系统存在的结构复杂、轴系占用空间大、传输效率低、易发故障多等缺点,结合轮缘驱动技术,设计出无轴轮缘驱动推进器(shaftless rim-driven thruster).无轴轮缘推进器将电机和推进器进行集成,其一体化设计制造思路是一种革命性的创新.它从电机和材料的选择到制造工艺均经过精心设计,其优异的推进效率,创新性的设计理论将成为新一代船舶推进系统的典范[3-4].
1 基本结构特点及其发展
无轴轮缘驱动推进器最早由美国海军在2005年发布的Tango Bravo计划中作为新一代潜艇发展首要关键技术提出的,最初主要应用于核潜艇和鱼雷等军事领域中[5-6].但随着相关研究的深入,无轴轮缘推进器占用空间小、布置结构简单的特点使其应用领域不断扩大,目前已有的最大功率无轴推进系统达到了800 kW,可用于1 000 t级的运输船舶.
1.1 无轴推进系统的基本原理
无轴轮缘驱动推进器是船舶推进系统的最主要部件,它主要由转子轴承、固定轴承、多磁极定子、外壳等组成,见图1.由图1可见,轮缘驱动电机与其他推进装置不同,其固定轴承位于旋转环两侧,用于确定旋转环的轴向位置,传递桨叶旋转产生的推力.而电机部分位于2个固定轴承之间,螺旋桨桨叶与电机转子通过旋转环相连,以径向联结取代轴向联结,使得螺旋桨和电机成为不可分离的集成整体,多磁极定子固定在两端轴承之间,当电机工作时,转子带动螺旋桨桨叶相对多磁极定子旋转.旋转部件与轴承之间无密封装置,使得桨叶旋转带动的水流能够通过海水冷却孔进入电机,在润滑轴承的同时,降低电机工作温度[7].
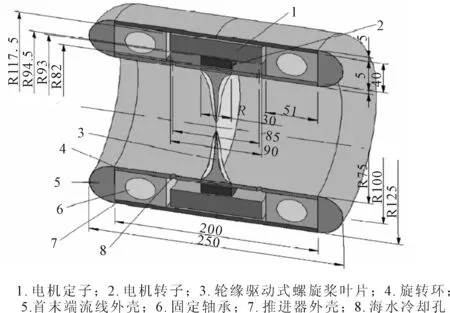
图1 无轴轮缘推进器基本结构图
与传统电机相比,无轴轮缘驱动推进器所采用的螺旋桨-电机一体化的设计要求更高,结构也有较大改进.在传统电机的设计中,为了减少同等的磁动势的情况下的磁阻,尽可能地减小电机转子与定子之间气隙;而在轮缘驱动电机的设计中,气隙大小的确定却相对复杂.气隙的大小在减少磁阻的同时,还必须考虑到转子与定子多层外壳的厚度,以及大直径所导致的机械性能要求,因此相对传统电机而言,轮缘驱动电机的气隙要扩大2~3倍.此外,由于无轴轮缘驱动推进器在水下工作,为了防止海水侵蚀对电机的影响,转子表面覆盖有2层不同材料的外壳,内层材料是铜,主要用于感应、传导电流,外层为特种不锈钢材料,在减小厚度、降低磁化电流影响的基础上保护其他部分不受海水干扰.定子外层覆盖有同样材料的薄保护层,由于其相对于气隙区域静止,有助于减少涡流损耗,见图2[8].为了防止保护层内的绕组阻抗过大,在减少绕组长度的同时,对于由电机直径增大所导致的轴向长度变化也有相应的要求,以达到控制整个推进器的体积与重量的目的.轮缘驱动电机所采用的双极绕组有助于减少段绕组数量,简化相关结构,同时通过减少低谐次磁通势,增加电机工作效率[9].
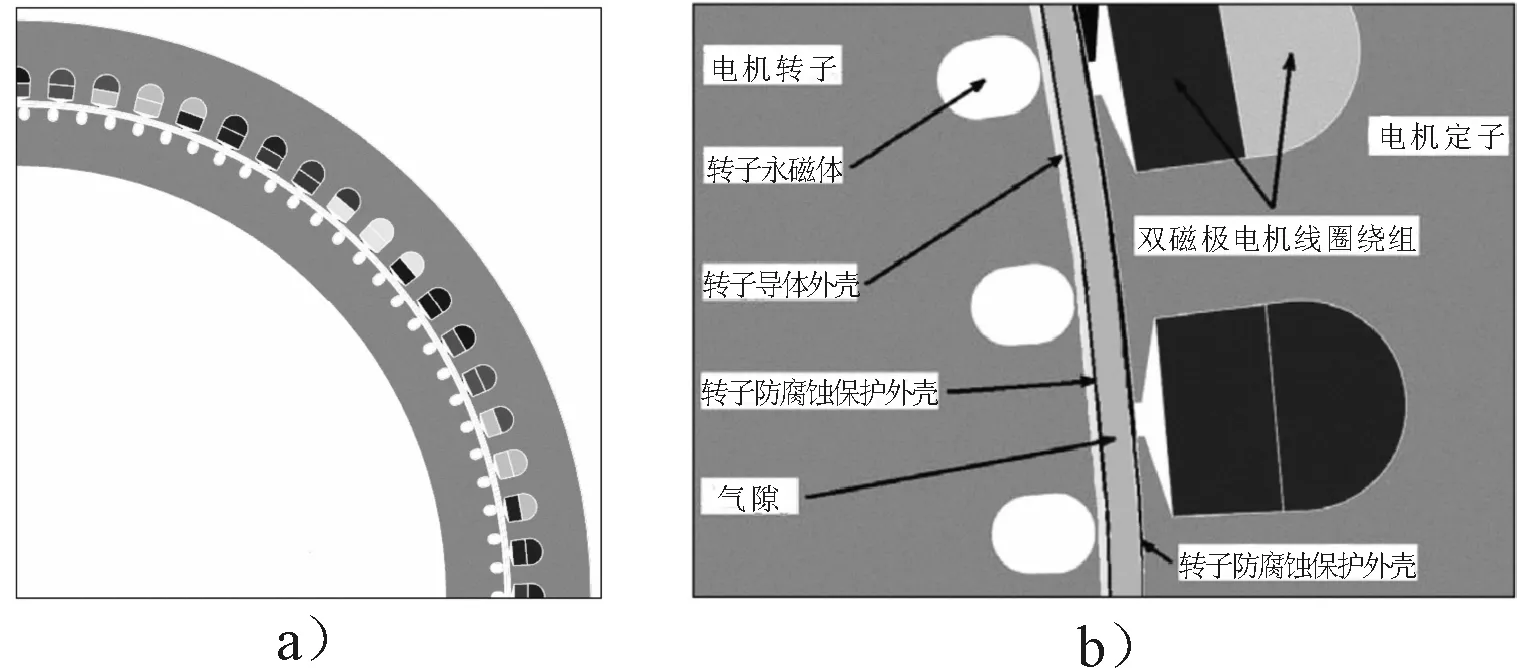
图2 无轴推进电机结构图
1.2 无轴推进系统的特点
与传统柴油机推进系统相比,无轴轮缘驱动推进系统在船舶设计、推进性能、减振降噪、制造及维护等方面都有诸多优势,总结如下.
1.2.1 提高船舶推进效率
船舶推进效率一般与船型和推进系统种类有关,有人曾经就各类船舶推进效率进行过统计,将统计结果与无轴推进船舶相比较,结果发现无轴推进可使船舶推进效率出现显著提高,如表1所列.经分析发现,无轴推进系统的应用可使得船尾线型得以改善,提高船尾流场品质,给船型优化提供更大的空间,并借此改进船舶流体性能,提高船舶水动力特性[10].根据仿真测算,经过优化并采用无轴推进系统的船型阻力比使用传统推进系统可降低5%~10%.同时,无轴推进系统组成结构简单,减少了轴系等传动部件,提高了传递效率,降低了能量传递损失15%~20%和密封润滑环节所导致的效率损失5%~10%.总体来说,采用无轴推进系统后船舶推进效率提高了20%~25%[11-12].
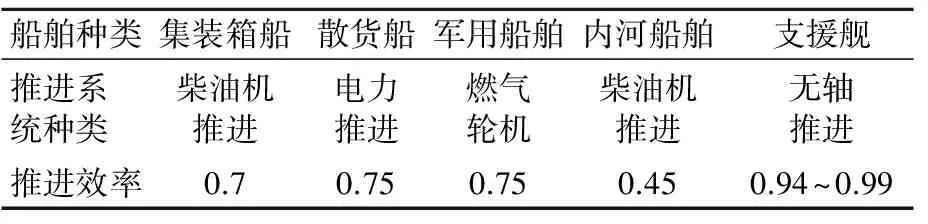
表1 若干种船舶推进效率比较
1.2.2 提高空间利用率
传统船舶的传动轴系长度往往要占据船舶全长的15%~20%,这就使得船舶在总体设计上的优化受到了一定的限制.即使采用常规的电力推进系统,其轴系虽然较短,但仍然采用机械形式传递能量,占用船舱空间.据测算,采用无轴推进系统可以减小动力系统占用空间的60%~70%,提高整体空间利用率的15%~25%[13].
1.2.3 提高舰船隐蔽性
在船舶运行过程中,由于传统轴系、齿轮箱等传动机构运动所产生振动占其总量的60%~70%,这对军用舰船,尤其是潜艇等水下航行器的隐蔽性和生存能力造成严重影响.为了进一步满足新一代舰船的战略需求,世界先进工业国家逐渐将目光转向先进的无轴推进系统,美国海军已将无轴推进技术列为继弗吉尼亚号核潜艇之后的新型核潜艇的首要关键技术[14].
1.3 无轴推进系统的研究现状
目前,国内外有多家研究机构在从事此类推进器的研究,并拥有了一些成果.2004年,美国的Schilling Robitics公司开发的5叶推进器(见图3),输入电压600 V,功率7.5 kW,输出转速1 000 r/min,额定推力为2 000 N,其主要特点是无需水密,允许海水通过电机内部,有助于降低电机温度,提高电机功率密度.2005年,挪威Brunvoll公司开发了大型4叶轮缘推进器(见图4),输出功率100 kW,其特点在于灵活性强、耐用度高;通过选用多槽式电机,通过永磁体的旋转带动螺旋桨运转;其轴承采用磁性流体轴承,减少维修和污染问题;根据安装位置设计导流罩,以减少噪声和振动.2006年,荷兰的Vander Velden Marine System公司开发了管道式7叶无轮毂驱动推进器(见图5),并在此基础上开发了一系列多种规格的产品,螺旋桨直径从0.45~1.05 m,输出功率30~295 kW,整体体积相对于其他产品较薄,并可与其他机械手臂相连,增加运动自由度[15].

图3 5叶无轴推进器 图4 4叶轮缘推进器

图5 7叶无轮毂驱动推进器 图6 多叶无轴推进器
除此以外,在2005年英国Rolls-Royce公司成功研制了功率为800 kW的无轴推进器(见图6),并将其应用于一艘小型近海支援船.在此之前,美国通用动力公司在2003年设计制造了一台89 kW的无轴推进器,并进行了相应的测试.目前,美国通用动力公司在之前研究的基础上,与海军水面武器研究中心卡德罗克分部(NSWCCD)合作研制大功率的无轴推进器,为下一步研究计划,即研制20 MW集成推进器打下基础.此外,挪威几家研究机构,包括:挪威科技大学、Smart Motor A S和Norpropeller A S等,也在积极开展合作,在无轴轮缘推进器领域进行了大量而深入的研究工作.但这些推进器普遍存在功率较小、可靠性低、结构相对复杂、成本较高等缺陷,一般在小型水下无人航行器中使用[16].
702研究所主要就轮缘推进器的水动力特性进行研究,包括螺旋桨的样式、外部导流罩的形状及其对推进效率的影响[17].台湾的成功大学在2008年研制一台小型轮缘驱动推进器的样机,但其功率较小,体积较大,只能用于小型无人潜水器中[18].
2 关键性技术问题
2.1 大功率电机-螺旋桨一体化设计原理和方法的研究
船舶动力系统对功率要求较大,大功率电机是不可或缺的.随着电机功率的增大,其机械尺寸都也随之增大,基本结构更加复杂,增加了一体化设计的难度.由于无轴推进电机对可靠性和高效性要求较高,一般采用磁性较高的稀土永磁电机.这类永磁电机体积小、质量轻、效率高、损耗小、运行可靠,电机形状和尺寸灵活多变,适用于轮缘驱动推进器这种一体化、结构复杂的推进装置.但与一般用途的永磁电机相比,无轴推进系统采用的永磁电机在设计中有诸多不同之处.由于其工作环境恶劣(水下工作),导致其结构与一般电机有较大差异,包括绕组大小、旋转环结构、转子直径、固定轴承位置等.
同时,由于其结构紧密,对各个部件制造精度要求较高,尤其是对转子与定子防腐蚀保护外壳的设计与制造有更加严格的要求.为了在保护转子和定子的同时,减少对电机性能的影响,应尽量减少定子内壳与转子外壳之间气隙的厚度.通常,为了避免气隙对电机的影响,往往采用非常规的多磁极的设计方案,以减少气隙产生的磁阻损耗,使电机具有电负荷低、铁耗占比例较大等特点.另外,定子与转子的保护壳在制造材料方面也有很高的要求,在保证厚度的前提下,具有耐腐蚀、抗磨损的特点.由于轮缘驱动电机的冷却方式是通过气隙之间流动的海水冷却,在设计时必须考虑到冷却海水的流动路线以及冷却效果.
2.2 无轴轮缘推进智能控制策略的研究
电子控制技术是现代永磁电机的主要优点之一.而矢量控制技术更可使永磁电机拥有良好的调速特性,但其前提是装有高分辨率转子角速度实时测量装置.此类传感装置一般通过安装在电机主轴上的光电码盘或旋转变压器进行测量,但轮缘驱动推进器的结构中取消了轮毂和电机主轴,无法安装相应的位置传感器,导致常规的测量方案无法应用,需要探讨新的测量方法.目前,尽管无位置传感系统的调速控制技术发展迅速,但是其起动和低速运转情况下存在的不稳定性问题始终无法完美解决.国内外研究成果表明,采用现有的无位置传感技术进行永磁电机的控制,难以得到比较满意的结果.因此,开发适合无轴推进系统的智能控制系统是十分必要,也是不可或缺的.
2.3 无轴轮缘推进系统-船体的动力学耦合关系的研究
无轴轮缘推进系统的电机与螺旋桨集成结构改变了传统推进系统的动力线型,由于缺少轮毂,螺旋桨旋转时所产生的流体变化与传统螺旋桨之间存在较大的差异.另外,电机转子与定子之间的气隙暴露在海水环境中,导致一定紊流的产生,从而影响推进器的效率;固定轴承以及旋转环外壳的存在一方面减少紊流,另一方面增大了水中的摩擦,对流体有利有弊.这些结构变化所导致的水动力学差异使无轴轮缘推进器在运行过程中与船体之间的动力学耦合关系也发生了改变,研究其与船体之间的作用特征、相互影响规律和非线性耦合关系有助于优化推进器设计方案与船体线型,提升推进效率,减少航行阻力.
2.4 无轴推进装置的润滑、密封和冷却系统的研究
为了确保电机的正常运行,无轴轮缘推进电机的转子和定子都应该采用相应的保护外壳进行海水密封,以杜绝海水对其内部零件的腐蚀和短路.因此,决定保护外壳性能好坏的关键因素是其材料的选择和结构的设计.保护材料除了具有较高的强度和耐海水腐蚀性能外,还需具有绝缘性,以减少漏磁和涡流损耗.国内通常采用不锈钢材料制作保护外壳,其在海水中易发生电化学腐蚀,寿命不高;而其导电性更易致使涡流损耗增大;非金属材料保护外壳质量轻、绝缘性和抗腐蚀性好,但目前工业生产流程较为复杂,成本较高,其可靠性值得研究.
此外,由于海水的粘度低,冷却作用好,润滑作用差,采用海水润滑的无轴推进系统滑动轴承的材料应具有良好的导热性、顺应性、耐摩性和强度.此外,轴承的结构,包括海水通道的设计、海水颗粒造成轴承损伤的防护措施以及轴承运行寿命的预估和维护更换步骤等,都是保证轴承润滑冷却可靠性的重要环节.
2.5 无轴推进装置振动和噪声控制方法的研究
军用舰船对自身的隐蔽性要求较高,而推进系统作为船上振动噪声的主要源头,其振动噪声水平更加受到重视.无轴轮缘推进系统与传统推进系统相比,取消了轴系等传动机构, 消除了轴系旋转产生的振动与噪声;其与船体间的联接较少,从而大幅减少了推进器与船体相互作用所产生的振动噪声.无轴推进电机定子工作的同时又可作为螺旋桨导流罩,可推迟螺旋桨叶片空泡的产生并屏蔽转子旋转产生的流体噪声.因此,从其工作原理看,无轴推进系统本身就是一种真正意义上的安静性推进装置,但其结构组成与传统推进系统的区别导致其振动机理与已有的理论截然不同,如何通过优化机械结构、改进制造工艺、提高工作效率等方法发挥其振动噪声小的优势,合理降低振动与噪声,也成为研究的热点.
3 结 束 语
无轴推进系统作为船舶推进系统的一项革命性的创新,在一定程度上解决了传统推进系统结构复杂、设计安装过程困难、占用空间大、振动噪声明显等缺点,使得其在军事、民用领域都有广阔的发展前景.在近10年中,无轴推进系统逐渐受到国内外研究机构的重视,随着人们对其研究的不断深入,各个关键性技术难点终将会被突破,对其技术的掌握将会对造船业的发展有极其重要的作用.从目前的研究状况看,我国在这方面的研究还比较浅薄,尚于基础性研究阶段,应加大相关方面的研究,为实现造船强国创造条件.
[1]TUOHY P M,SMITH A C,HUSBAND M.Induction rim-drive for a marine propulsor[C]∥Power Electronics, Machines and Drives (PEMD 2010),5th IET International Conference on.IET,2010:1-6.
[2]GRAY A,SHAHRESTANI N,FRANK D,et al.Propagator 2013:Uf autonomous surface vehicle[J].Association for Unmanned Vehicle Systems International,2013,25:1-10.
[3]汪 勇,李 庆.新型集成电机推进器设计研究[J].中国舰船研究,2011(1):82-85.
[4]郑 珂.集成电机推进器构型及特点分析[J].舰船科学技术,2011(6):96-98.
[5]陈 虹,冷文军. 美、俄核潜艇技术发展述评[J].舰船科学技术,2008(2):38-44.
[6]钱 东,崔 立,薛 蒙.美国新一代电动力轻型鱼雷研发策略分析[J]. 鱼雷技术,2007(6):1-4.
[7]叶雨涵. 无毂环驱式推进器之整合设计与实现[D].台南:台湾国立成功大学,2008.
[8]TUOHY P M,SMITH A C,HUSBAND M,et al.Rim-drive marine thruster using a multiple-can induction motor[J]. Electric Power Applications,IET,2013,7(7):557-565.
[9]HASSANNIA A,DARABI A.Design and performance analysis of superconducting rim-driven synchronous motors for marine propulsion[J].Applied Superconductivity,IEEE Transactions on, 2014, 24(1): 40-46.
[10]DUBAS A.Robust automated computational fluid dynamics analysis and design optimisation of rim driven thrusters [D]. Southampton:University of Southampton,2014.
[11]YAKOVLEV A Y,SOKOLOV M A,MARINICH N V.Numerical design and experimental verification of a rim-driven thruster[C]∥Proceedings of Second International Symposium on Marine Propulsors. Hamburg,Germany,2011.
[12]徐筱欣.船舶动力装置[M].上海:上海交通大学出版社, 2007.
[13]张晓飞.超小型水下机器人对转集成电机推进器研究[D].广州:华南理工大学,2012.
[14]王汉刚.美国核潜艇推进系统减振降噪技术发展分析[J].舰船科学技术,2013(7):149-153.
[15]陈柏动.具相位超前之无刷直流马达无感测器驱动系统[D].台南:台湾国立成功大学,2008.
[16]WU Y.Design and fabrication of a maneuverable robot for in-pipe leak detection[D].Massachusetts:Massachusetts Institute of Technology,2014.
[17]CAO Q,HONG F,TANG D, et al.Prediction of loading distribution and hydrodynamic measurements for propeller blades in a rim driven thruster[J].Journal of Hydrodynamics,Ser.B,2012,24(1):50-57.
Technology Development and Prospect of Shaftless Rim-driven Propulsion System
TAN Weizhong1,2,3)YAN Xinping1,2,3)LIU Zhenglin1)ZHANG Cong1,2,3)HUANG Qianwen1,2,3)TIAN Zhe1,2,3)
(SchoolofEnergyandPowerEngineering,WuhanUniversityofTechnology,Wuhan430063,China)1)(ReliabilityEngineeringInstitute,NationalEngineeringResearchCenterforWaterTransportSafety(WTS),Wuhan430063,China)2)(KeyLaboratoryofMarinePowerEngineeringandTechnology(MinistryofTransportation),Wuhan430063,China)3)
Shaftless rim-driven propulsion system is a new type of ship propulsion system developed in recent years,which is a successful attempt of innovative mode of thinking on ship propulsion system.The shaftless propulsion system can effectively reduce the cabin space occupied by propulsion system and increase ship propulsive efficiency significantly.It can also meet the concealment requirement of warship by reducing vibration and noise.Therefore, it has widely application prospect and great application value in both military and civilian areas.This paper introduces the fundamental and structure of shaftless propulsion system.The characteristics and application prospect of shaftless propulsion system are also summarized based on the technology development and key technologies.
shaftless propulsion; rim-driven; propulsion system; marine power system
2015-02-08
*国家自然科学基金重点项目(批准号:51139005)、中央高校基本科研业务费专项资金项目(批准号:2015-ZY-056)、中央高校基本科研业务费专项资金项目(批准号:2014-IV-030)资助
U664.3
10.3963/j.issn.2095-3844.2015.03.033
谈微中(1990- ):男,硕士生,主要研究领域为船舶动力系统仿真、多体动力学耦合、新型船舶推进系统
