微型客车侧倾单参数敏感性研究*
2015-04-19李胜琴
李胜琴 张 宇 赵 立
(东北林业大学交通学院 哈尔滨 150040)
微型客车侧倾单参数敏感性研究*
李胜琴 张 宇 赵 立
(东北林业大学交通学院 哈尔滨 150040)
以某微型客车为参考原型,利用Matlab/simulink软件建立三自由度动力学模型,在此基础上进行车辆急转弯过程中侧翻稳定性虚拟试验研究.通过J-turn试验和鱼钩试验(fish-hook),分析了车速、转向盘转角对车辆侧向加速度、车身侧倾角等运动姿态的影响,进行车辆转弯过程中的防侧翻稳定性研究.同时以车辆质心位置、轴荷分配、行驶速度、转向盘转角等为主要参数,分析车辆结构及运行参数对微型客车侧翻倾向性的影响.结果表明,车辆质心高度对侧翻倾向性影响最为明显,车辆行驶速度与转向盘变化速度结合,对车辆侧倾的影响也较大.
微型客车;侧翻;单参数;虚拟试验;Matlab/simulink
0 引 言
NHTSA研究报告显示,侧翻事故在非碰撞导致的第一类有害致命交通事故中大约占90%,非碰撞导致的车辆侧翻事故占美国所有车辆交通事故的2.3%,但却大约占全美恶性交通事故的11%[1-2],汽车侧翻已经成为了全世界瞩目的安全问题.因此,对汽车的侧翻问题进行分析研究,提高汽车的抗侧翻能力,减少侧翻事故的发生,已逐渐成为世界汽车研究的焦点[3-4].
微型客车侧翻研究主要有:(1)利用多体系统动力学仿真软件,建立车辆系统动力学模型,进而进行车辆转弯过程中的稳定性仿真研究;(2)通过试验进行相关研究,可以根据实车运行情况进行相应控制方法的验证及修改,但是该方法试验重复性不高,研究成本较高[5];(3)而依据微型客车系统,进行相应简化,通过理论分析,推算出微型客车转弯过程中的运动状态方程,通过建立数学模型对车辆进行侧翻倾向研究,能够进行较好的侧翻倾向性预测和评估.李志刚等[6]以一款微型客车为基础,建立了多体动力学模型,进行了急转弯稳定性虚拟试验,通过单因素的仿真试验,揭示了客车结构参数、行驶参数及外部工况对微型客车侧翻倾向性的影响,表明路面附着系数对侧翻倾向性影响最为明显.
本文利用MATLAB/Simulink软件建立整车三自由度运动模型,主要靠车车辆结构参数及运行参数对车辆侧倾倾向的影响,重点分析单因素对侧倾倾向性影响的敏感度,为微型客车防侧翻控制奠定理论基础.
1 动力学模型
在侧翻控制系统研究中应用最多的是三自由度模型.3个自由度分别为车辆侧向位移、车辆横摆角速度及车身侧倾角.为了简化的需要,在建立三自由度模型时需做如下假设[7-8]:(1)模型以前轮转角作为输入,不考虑转向系统影响;(2)忽略侧向风的影响;(3)忽略车身绕y轴的俯仰运动;(4)假设汽车沿x轴方向的前进速度u恒定;(5)忽略轮胎及悬架的非线性因素;(6)忽略地面切向力变化与侧偏力变化引起的轮胎侧倾特性的变化;(7)假设两个前侧或两个后侧轮胎运动轨迹相同;(8)忽略轮胎因转速、压力等因素引起的轮胎特性变化,认为同轴的内外侧轮胎有相同的转角和侧倾角;(9)忽略轮胎回正力矩的作用;(10)轮胎与地面接触时,忽略轮胎滚动中心距地面高度变化.
根据以上假设建立三自由度简化模型见图1所示.
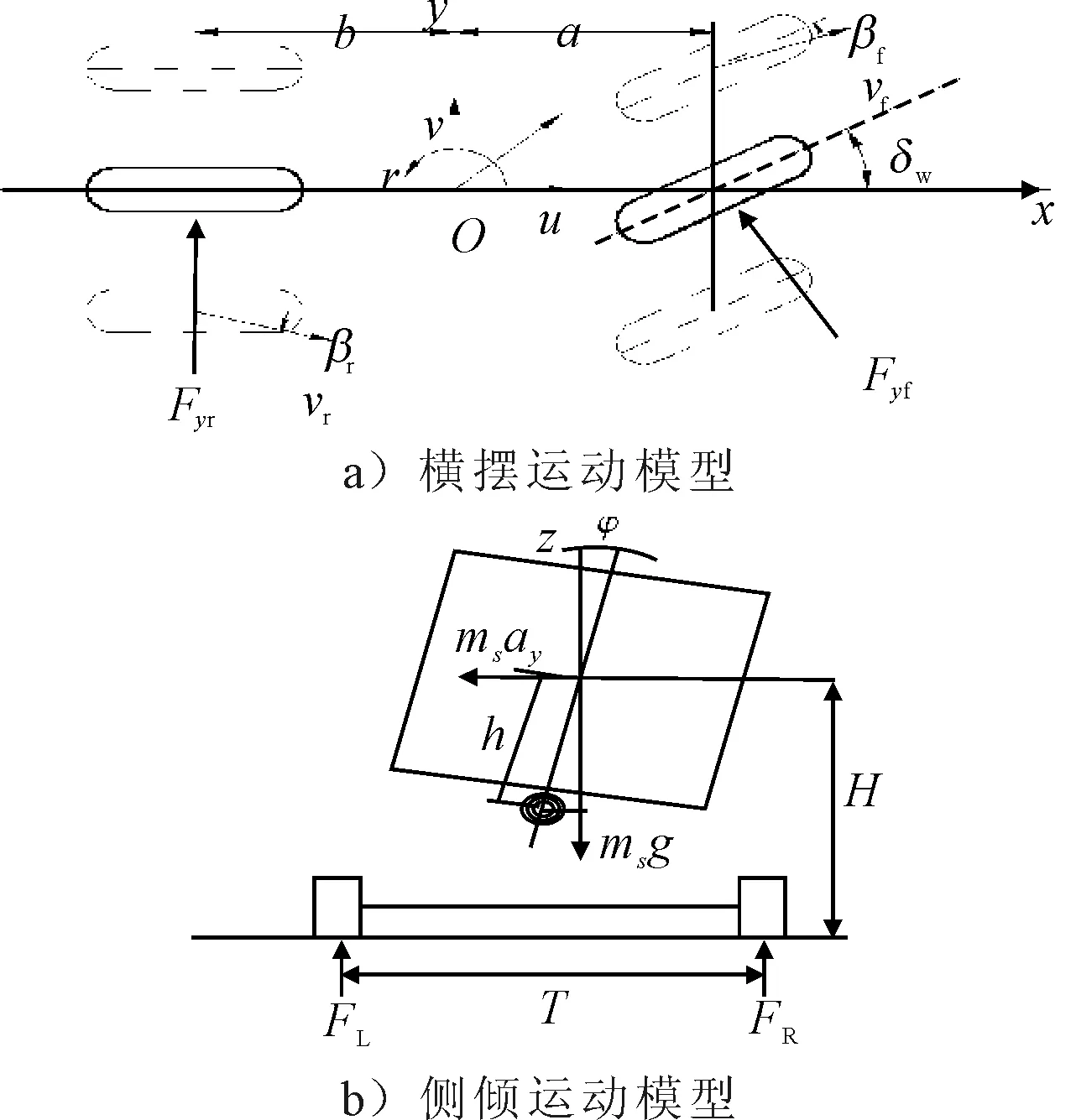
图1 三自由度简化模型
图1a)为汽车二自由度横摆运动单轨模型,根据假设(6),(7),同轴内外侧车轮具有相同的运动轨迹,因此可以将同轴的两车轮简化对称中心的一个车轮,称为“自行车模型”.其中:u为汽车沿x轴的行驶速度,2个自由度分别为横向运动,横摆运动.
图1b)为车辆在yz平面的侧倾运动模型.认为车桥及车身为刚体,在yz平面内车身绕O点旋转,ms为车身质量,也称簧载质量.根据假设,本文只用考虑轮胎的侧偏特性,认为车架是刚性的,车辆的垂向载荷转移仅通过悬架,且忽略悬架运动学的影响.根据车辆在侧倾运动过程中的受力状态,可以列出车辆运动过程中的三自由度运动方程.
考虑前轮转角影响以及簧载质量在侧倾时的作用,列出y轴上的力平衡方程.
(1)
式中:m为整车质量;ms为簧载质量;ay为簧载质量侧向加速度;Fyf为前轮侧偏力;Fyr为后轮侧偏力;h为汽车质心到侧倾中心的距离;δw为前轮转向角.
忽略侧倾和横摆方向转动惯性积的影响,可以列出z轴上的转矩平衡方程.
(2)

忽略非簧载质量以及前后轴的不同特性对侧翻的影响,列出簧载质量在质心位置绕x轴的力矩平衡方程式:
(3)
式中:ay为侧向加速度;φ为簧载质量侧倾角;Ix为整车绕x轴的转动惯量;cφ为悬架等效侧倾阻尼系数;φ为悬架等效侧倾刚度.

定义前后轮的等效侧偏刚度k1,k2分别为k1=-2kfζ1cosδw,k2=-2krζ2.
最终得到三自由度侧倾运动方程为
(4)
本文所用车辆参数如表1所列.
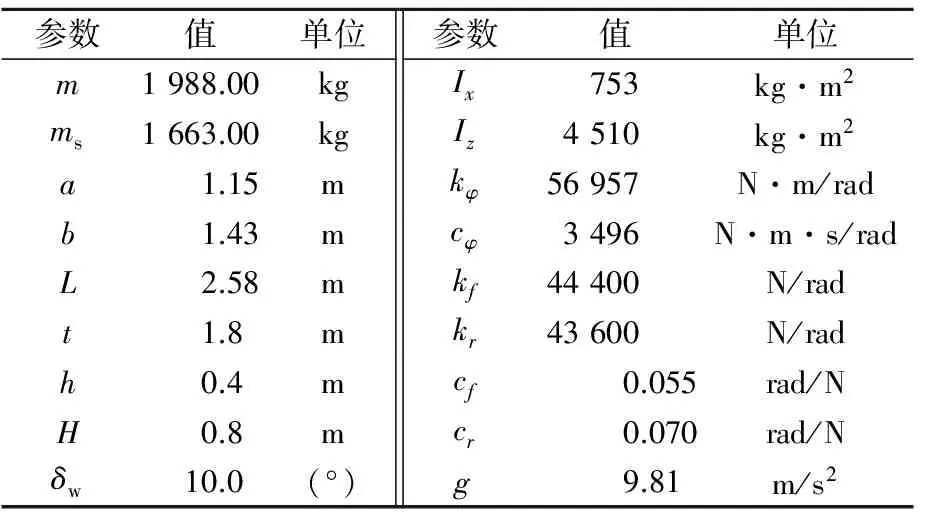
表1 仿真模型所用车辆主要参数表
2 单参数影响敏感度分析
为了分析单个因素的变化对于微型客车侧翻倾向性的影响,本文选取4个影响车辆侧翻的主要参数,即把车速、质心高度、方向盘转角、轴荷分配系数作为分析参数.为考查单个因素对车辆侧翻的影响,修改其中的某1个参数同时保持其余3个参数不变,依据当前美国侧翻法规49CRF Part 575的规定,无论是静态测试还是动态测试均以车轮轮胎有无离开地面为判断依据,综合考虑到侧翻指标和预警算法两方面处理的难易程度,确定以车辆的横向载荷转移率(lateral-load transfer rate,LTR)的最大值作为评价指标.
车辆的横向载荷转移率LTR是一种很常用也很有效的侧翻危度指标.在汽车转弯时由于受到离心力的作用,车辆内侧的2个车轮的垂直载荷减小,而外侧的两个车轮的垂直载荷增大.横向载荷转移率即为车辆左右侧轮胎垂直反力之差与之和的比值,该比值在-1 ~+1 之间,正负号可表示车辆的转弯方向,即
当汽车沿直线稳定行驶时,假设载荷对称,则左右车轮的垂直载荷一样,此时,LTR=0;当汽车侧倾时,会造成左右轮胎载荷发生转移,LTR不等于0;当有一侧车轮抬起,汽车发生侧翻,此时离地车轮的垂直载荷等于0,即FL=0 或者FR=0,此时LTR的绝对值是1.因此LTR的变化范围为 [ -1,1],相对应LTR的绝对值变化范围为 [0,1],不难得到,当 |LTR| < 1时,汽车的车轮都是接地状态,不会发生侧翻,汽车处于侧倾稳定的状态,当 |LTR| ≥ 1时,汽车会发生侧翻,|LTR|的值越大,侧倾稳定性会越差.
由于对横向载荷转移率的直接测量是不可行的,这里提出动态载荷转移率(LTRd)的概念,根据前面所建立的三自由度模型,考虑车辆有侧倾运动时,列出非簧载质量绕位于地面上的轮距中心点的受力平衡方程.
(5)
式(5)建立了汽车行驶状态和结构参数与动态横向载荷转移率之间的数学关系,这样三自由度模型就可以计算出每一刻横向载荷转移率,并作为车辆实时的侧翻危度指标.一般认为,当其值大于0.8或小于-0.8时,防侧翻控制系统即可判断车辆将要发生侧翻.
2.1 质心高度变化影响
图2为随质心高度变化对动态横向载荷转移率最大值的影响,可以看出其他条件不变,当质心位置与车辆侧倾中心重合时,车辆的动态载荷转移率为0,说明车辆不会发生侧翻.随着质心位置的升高,动态载荷转移率最大值随之呈线性变化趋势增加,当质心高度增加到0.8时,动态载荷转移率最大值达到临界值1,若质心位置继续升高,则车辆处于失稳状态,即将发生侧翻.说明汽车运行速度不变时,随着汽车车身高度的增加,汽车侧翻的稳定性会随之下降,并呈线性关系变化.在汽车超载或者运载货物超出汽车标准运载范围时,重心会显著升高,这也是很多载货汽车发生侧翻事故的重要原因之一.因此,在汽车的设计中应在满足汽车基本功能的前提下,尽量降低汽车重心高度,尤其是载货汽车.
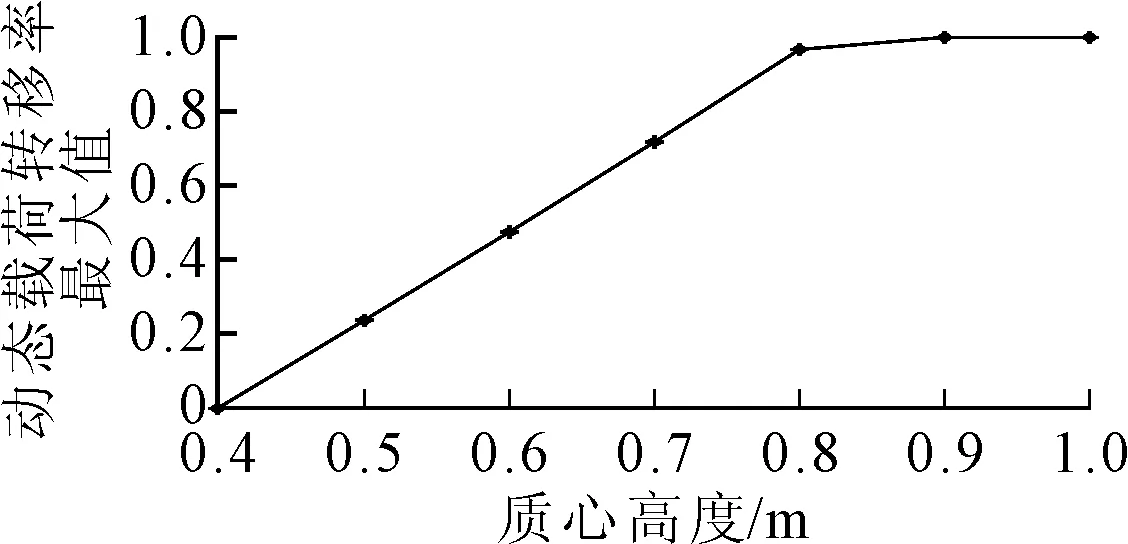
图2 质心位置对动态载荷转移率最大值的影响
2.2 轴荷分配变化影响
图3为质心到前轴距离对动态载荷转移率最大值的影响,可以看出质心到前轴的距离或者前后轴荷的分配对动态载荷转移率的影响不是特别明显,当质心到前轴距离从0.5 m变化到1.2 m的时候,动态载荷转移率最大值从0.58增加到0.85,变化不大.可以认为车辆轴荷分配对车辆侧翻的影响不大,相对于其他影响因素,可以忽略.
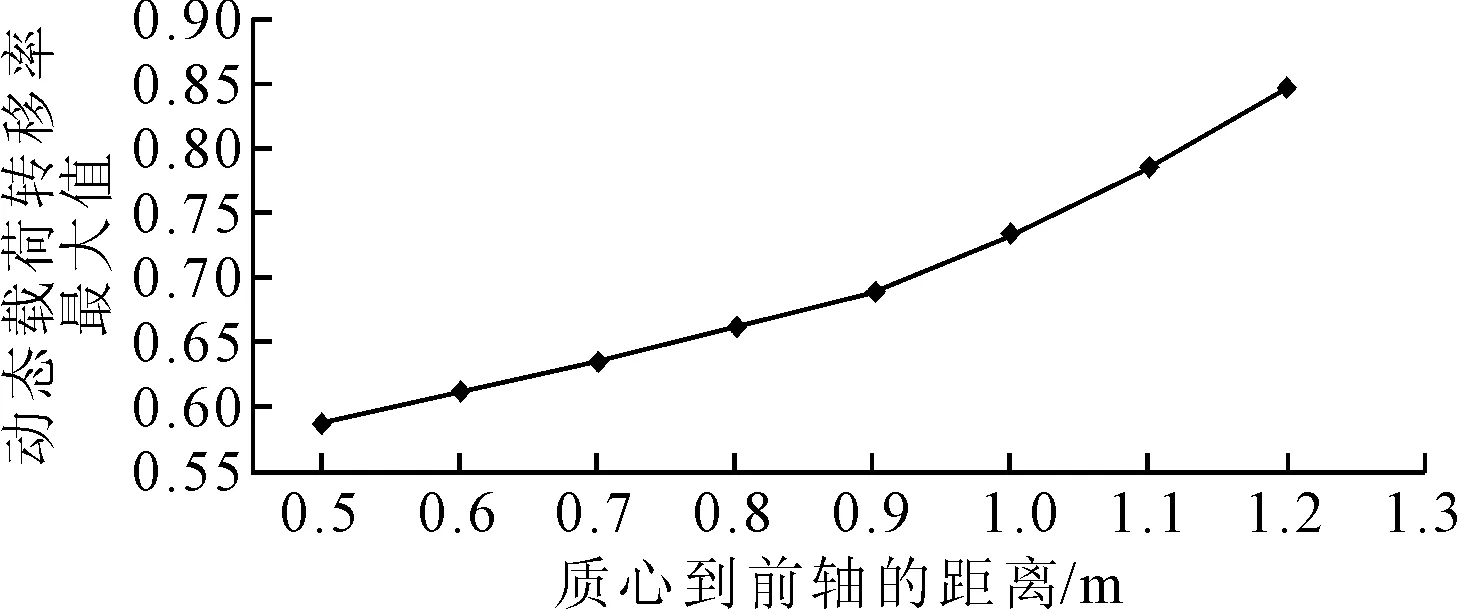
图3 轴荷分配对动态载荷转移率最大值的影响
2.3 车速变化影响
如图4为车速变化对动态载荷转移率最大值的影响,可以看出,动态载荷转移率最大值随着车速的增加呈线性变化增加.当车速超过90 km/h以后,动态载荷转移率最大值达到1.2,以后呈线性增加,处于失稳状态.随着速度的增加,车辆发生侧翻的可能性增加.而在正常车速范围内,车辆动态载荷转移率处于稳定范围,车辆稳定运行.
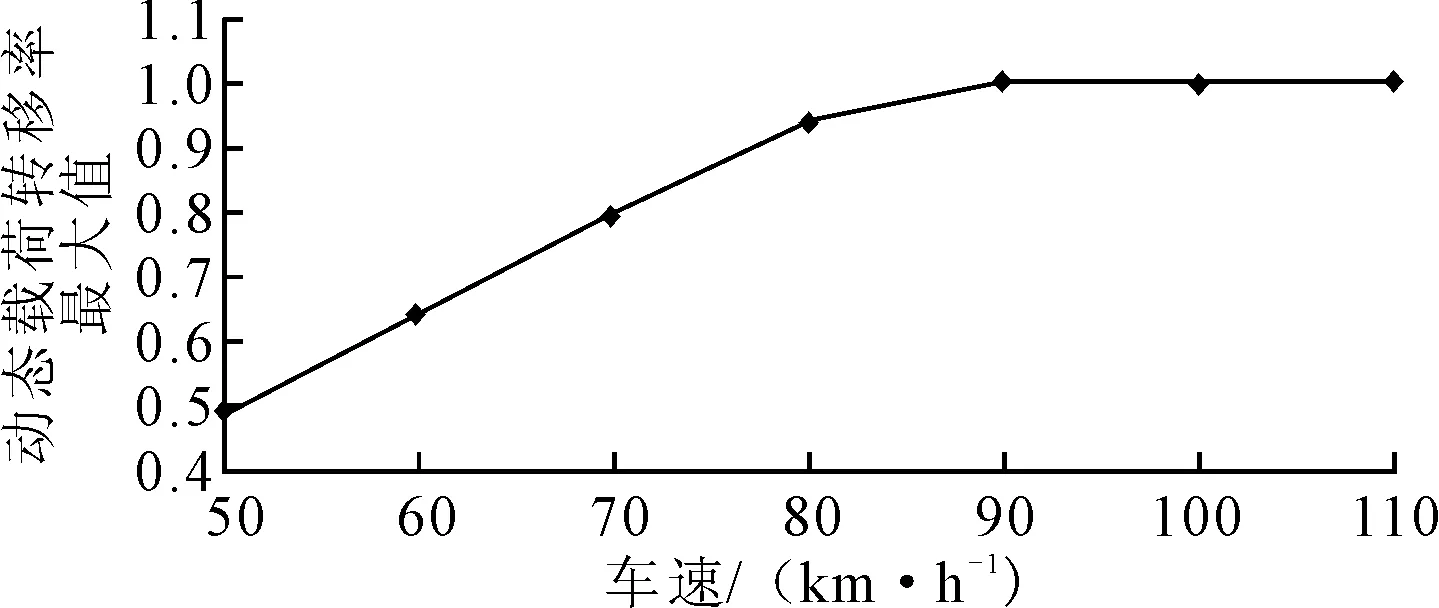
图4 车速对动态载荷转移率最大值的影响
2.4 转向盘转角变化影响
图5为车速为50 km/h时,转向盘转角对车辆动态载荷转移率最大值的影响,可以看出,当转向盘转角在9°以下时,车辆能够处于稳定运行状态;当转向盘转角增加到10°时,动态载荷转移率最大值超过稳定范围,车辆失稳.而当车速增加到60 km/h时,转向盘转角达到8°时,动态载荷转移率超过限值,车辆失稳.说明转向盘转角对车辆侧翻稳定性的影响,需要结合其他因素共同分析.
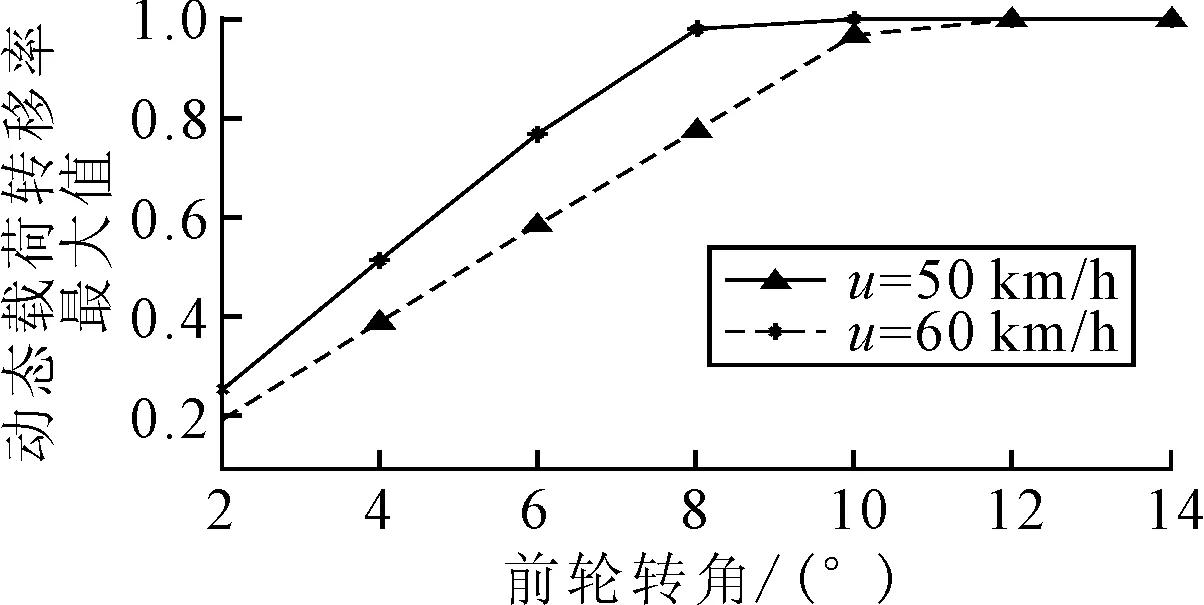
图5 转向盘转角对动态载荷转移率最大值的影响
3 结 束 语
本文利用simulink软件建立包括车身侧倾角、车辆侧向加速度,车辆横摆角速度3个自由度的整车侧翻模型,用于分析车辆结构及运行参数对车辆侧倾趋势的敏感度.
确定车辆质心位置、轴荷分配、车速,以及转向盘转角等4个参数,进行车辆侧倾敏感度分析.其中质心位置对侧倾倾向影响最大,车速本身对车辆侧倾的影响不大,但是结合转向盘转角之后,
对车辆的侧倾趋势影响增大.
[1]WHITEHEAD R,TRAVIS W,BEVLY D M,et al.A study of the effect of various vehicle properties on rollover propensity[R].SAE2004-01-2094,2004.
[2]金智林,翁建生,胡海岩.汽车侧翻预警及防侧翻控制[J].动力学与控制学报,2007,5(4):365-369.
[3]YEDAVALLI R K, HUANG Hsun hsuan. Rollover prevention of multi-body ground vehicles extending LQR design for control coupled output regulation[C]∥Proceedings of the ASME 2010 Dynamic Systems and Control Conference, September 12-15, 2010, Cambridge, Massachusetts, USA.
[4]宋小文,李 杰.一种改进的汽车侧翻模型及其应用研究[J].汽车工程,2009.31(10):971-975.
[5]HANLONG Y, LOUIS Y L. A robust active suspension controller with rollover prevention[J]. SAE, Paper No. 2003-01-0959.
[6]李志刚,沈 明,邹 猛,等.基于多体动力学的微型客车急转弯侧翻倾向性仿真[J].清华大学学报:自然科学版,2010,50(8):1286-1289.
[7]朱夏毅.客车动态抗侧翻稳定性试验仿真研究[D].重庆:重庆交通大学,2012.
[8]贺 宜,褚端峰,吴超仲,等.路面附着条件对车辆横向稳定性影响的量化分析[J].武汉理工大学学报:交通科学与工程版,2014,38(4):784-787.
Study of Mini-bus Rollover Tendency Based on Single Parameter
LI Shengqin ZHANG Yu ZHAO Li
(TrafficCollege,NortheastForestUniversity,Harbin150040,China)
Taking a passenger car as the research object, a three degree freedom multi-body dynamics model is developed using Matlab/simulink, to analyze mini-bus dynamics and sharp turn stability. Using the J-turn and NHTSA Fishhook 1a virtual tests, the influence of vehicle velocity and steering angle on the vehicle motion attitude are analyzed, such as later acceleration and body roll angle. The influences of mini-bus structure, traffic conditions, and external conditions on the rollover tendency were also analyzed in single-factor experiments. A correlation between the vehicle parameter of center of gravity location and rollover propensity is found, the results show that the vehicle center of gravity is the most important parameter which influenced the rollover tendency of mini-bus, and combined of the vehicle velocity, the steering velocity also has some influence on the rollover stability of mini-bus. The results can be used to improve mini-bus redesigns, improve risk prediction, and reduce the incidence of traffic accidents.
mini-bus; rollover; single parameter; virtual test; Matlab/simulink
2015-01-10
*国家自然科学基金青年基金项目(批准号:51205055)、中央高校基本科研业务费专项资金项目(批准号:DL13CB07)资助
U461.6
10.3963/j.issn.2095-3844.2015.03.017
李胜琴(1976- ):女,副教授,主要研究领域为车辆系统动力学及控制