基于神经网络PID的液动调节阀控制研究
2015-04-16顾寄南
□ 周 培 □ 顾寄南
江苏大学 制造业信息化研究中心 江苏镇江 212013
液动调节阀在石油、化工和船舶等行业中的地位十分重要,它能够对温度、流量、压力等被控变量进行控制。而阀门控制器作为其重要附件之一,可以改善阀门特性,提高控制精度和速度,增加控制的灵活性。传统阀门定位器采用常规PID控制,控制算法简单,容易实现。但由于液压系统所处环境极其复杂,有许多不确定因素,难以建立精确的数学模型,因此传统PID已经难以满足控制要求。为了提高液压控制系统的稳定性,克服传统PID的缺点,本文引入BP神经网络,设计出具有自适应能力的智能PID控制系统。
1 液动调节阀控制原理
液动调节阀控制原理如图1所示,被控对象是液动调节阀。将输入控制信号r(4~20 mA电流信号)与通过传感器测到的角度反馈值ym进行比较,当偏差为e时,通过A/D信号转换,输出信号u来调节阀的转动,最终准确达到阀芯所需要的位置。

▲图1 阀门控制器工作原理
2 基于BP神经网络整定的PID控制
2.1 BP神经网络PID控制系统结构
基于BP网络的PID控制系统结构如图2所示,控制器由两部分构成:经典的PID控制器和BP神经网络学习算法。前者直接对被控对象进行闭环控制,后者是根据系统的运行状态,调整PID控制器的参数,从而达到性能指标的最优化,使输出层神经元的输出状态对应于PID控制器的三个参数kp、ki、kd,通过神经网络的自学习和加权系数调整,使神经网络输出对应于某种最优控制规律下的PID控制参数。
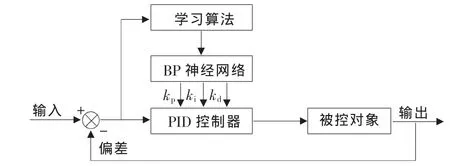
▲图2 基于BP神经网络PID控制器结构
经典增量式数字PID的控制算法为:

式中:kp、ki、kd分别表示比例、积分、微分系数。
2.2 BP神经网络结构
本文采用三层BP神经网络,其结构如图3所示。
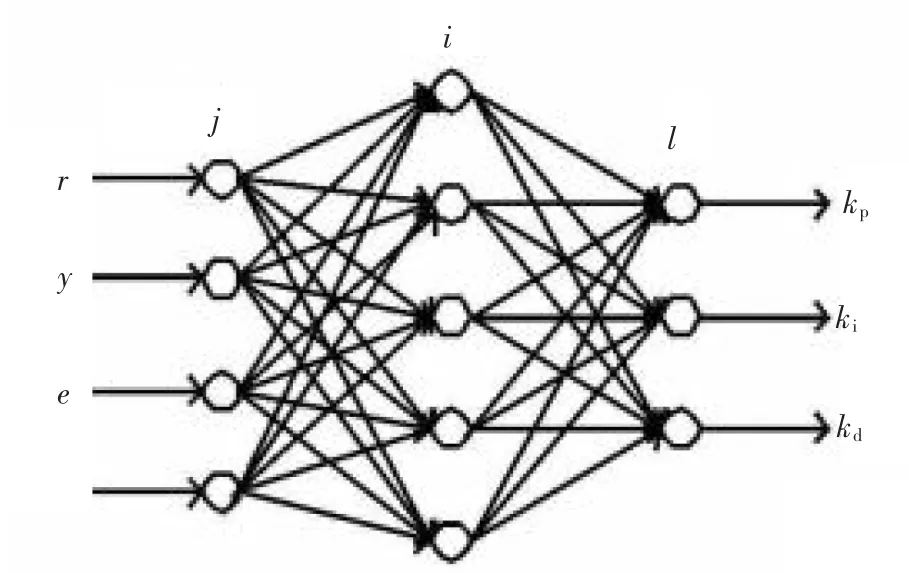
▲图3 BP网络结构
网络输入层的输入为:

式中:x(j)为给定网络输入;M为输入层节点数,根据被控对象的复杂程度,选取M值为4。
网络隐含层的输入为:

隐含层的输出为:

式中:wij(2)为隐含层的加权系数,上角标(1)、(2)分别代表输入层、隐含层。
隐含层神经元的活化函数取正负对称的sigmoid函数:

网络输出层的输入为:

输出层的输出为:

式中:wli(3)为输出层加权系数,上角标(3)代表输出层。
输出层的3个输出分别对应PID控制器的3个参数,即:
因为PID控制器的3个参数均不能取负数,所以输出层神经元活化函数为非负的sigmoid函数,即:

取性能指标函数为:

3 系统仿真
液动调节阀采用闭环液压伺服控制,根据已知参数及液压系统的特点,推导出闭环传递函数为:

▲图4 常规PID阶跃响应曲线
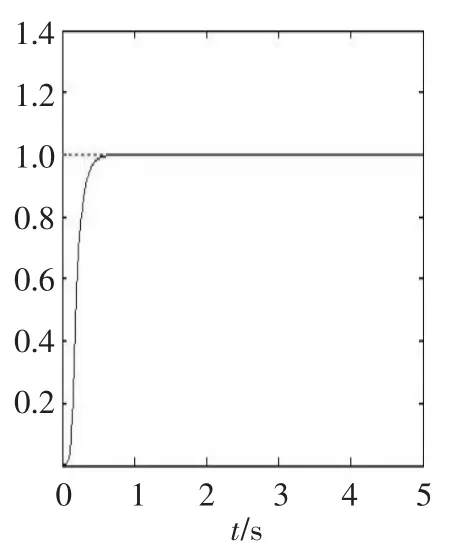
▲图5 神经网络PID阶跃响应曲线
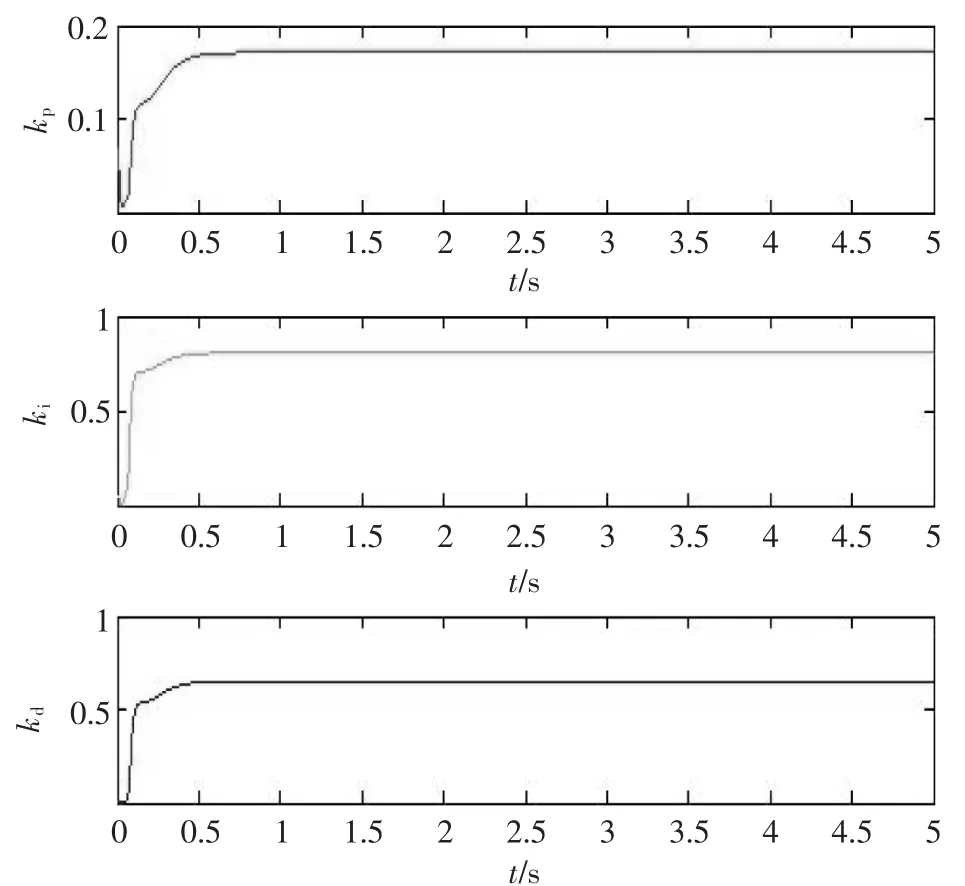
▲图6 参数自适应曲线

通过MATLAB/Simulink对常规PID仿真,结果如图4所示。针对神经网络PID,本文选用3层网络,网络结构为4-5-3,学习速率为0.28,惯性系数为0.04,加权系数区间为[-0.5~0.5]之间的随机数,编写神经网络程序后,输入阶跃响应信号,其阶跃响应曲线如图5所示,参数自适应曲线如图6所示。
由图4和图5对比可知,常规PID出现了较大的波动,而且趋向稳定的时间较长。BP神经网络PID几乎没有超调量,而且很快达到稳定状态。
4 结束语
本文针对液动调节阀的液压伺服控制系统分别设计了常规PID控制器和BP神经网络的PID控制器,通过MATLAB仿真表明,BP神经网络控制器的控制效果比普通PID的控制效果更优,而且具有超调量小、鲁棒性强等特点。
[1] 薄永军.温室温度控制系统神经网络PID控制算法研究[J].安徽农业科学,2014,42(13):4102-4104.
[2] 丁曙光,吴卫平,桂贵生.基于神经网络PID的液压位置伺服控制的研究[J].组合机床与自动化加工技术,2009(3):49-51.
[3] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
[4] 刘曙光.液压伺服系统神经网络 PID控制[D].南京:南京理工大学,2004.
